






EPS模型,电动助力转向模型,包含回正控制,助力控制器,采用滑模变控制回正,采用PID控制算法来控制助力,结构清晰,通俗易懂,非常适合eps初学者学习使用,具有详细的建模公式以及计算过程,包含word文档,控制策略思路等等,方便学习。
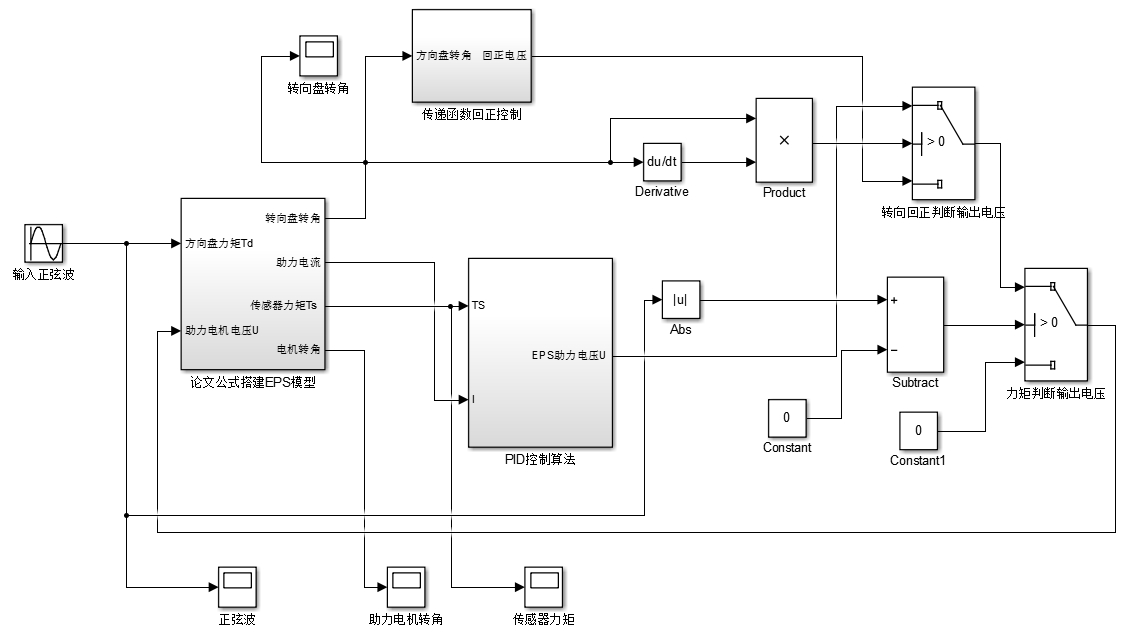
电动助力转向系统控制系统
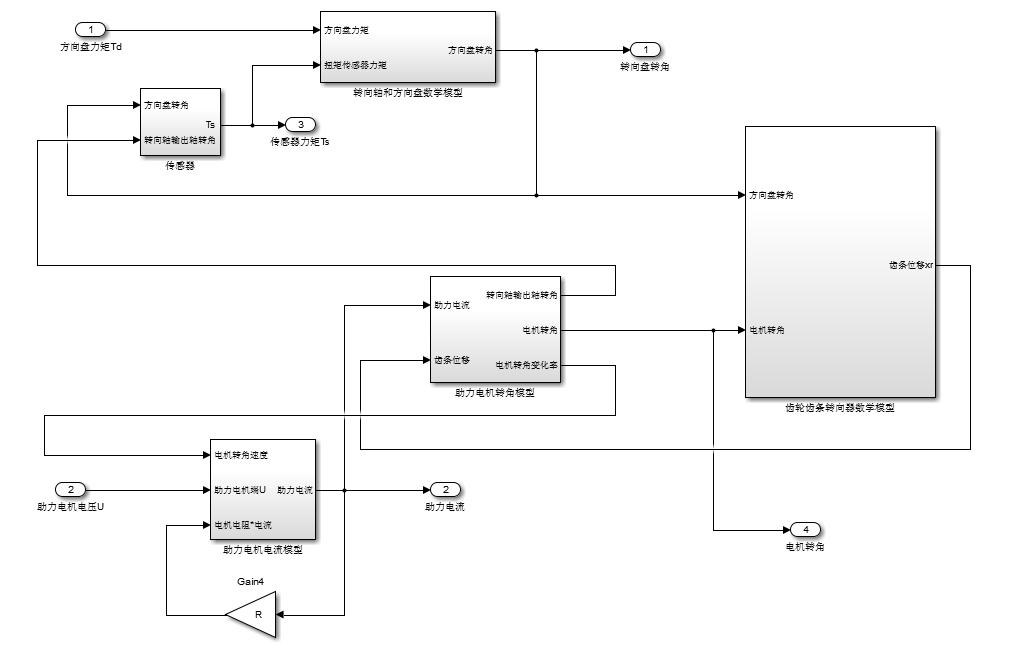
电动助力转向系统被控系统
PID控制算法
控制策略
软件在环仿真测试
详细计算步骤,公式搭建过程,仿真分析结果
资料齐全,参数具备,完整过程。
ID:6945658161217906
牡丹城幽默的草莓
EPS模型是一种电动助力转向模型,它包含了回正控制和助力控制器两个基本部分。在这个模型中,我们采用了滑模变控制回正和PID控制算法来控制助力,从而实现精准的转向控制。这篇文章旨在为EPS初学者提供一个结构清晰、通俗易懂的学习资源,其中包含了详细的建模公式和计算过程,以及一些控制策略思路。
首先,我们来讨论一下电动助力转向系统的控制系统。这个系统的设计主要分为两个部分:被控系统和控制器。被控系统是指整个EPS系统中的电动助力转向部分,它是我们需要控制的对象。而控制器则是负责对被控系统进行控制的部分,其中包括回正控制和助力控制。
在回正控制方面,我们采用了滑模变控制回正的方法。滑模变控制是一种基于滑模面的控制方法,它通过调节控制输入来使滑模面达到稳定状态,从而实现对系统的回正控制。具体来说,在电动助力转向系统中,我们可以通过调节滑模面的参数来控制转向的回正速度和精度。
另一方面,助力控制是通过PID控制算法来实现的。PID控制算法是一种经典的控制算法,它通过不断地调节控制输入的大小,使被控系统的输出与期望值之间达到稳定的差距。在电动助力转向系统中,我们可以通过调节PID控制器的参数来控制助力的大小和响应速度,从而实现对转向的辅助控制。
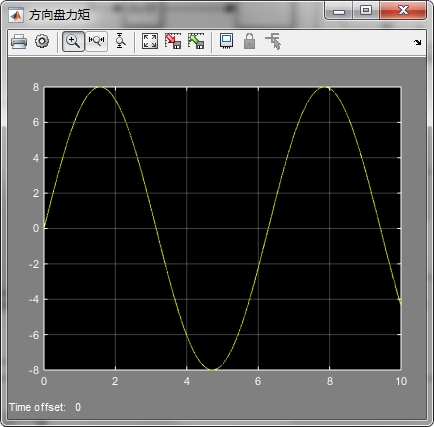
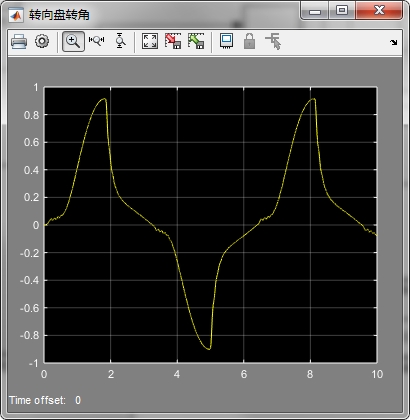
为了验证我们设计的控制系统的性能,我们使用了软件在环仿真测试。在仿真过程中,我们根据详细的计算步骤和建模公式,搭建了整个电动助力转向系统的仿真模型,并进行了仿真分析。通过对仿真分析结果的观察,我们可以评估我们设计的控制系统在不同工况下的性能表现,从而进一步优化控制策略和参数。
综上所述,这篇文章提供了一个完整的电动助力转向系统控制的学习资源。文章内容详尽,包含了建模公式、计算过程和仿真分析结果等方面的资料,具备完整的控制策略和参数。对于初学者来说,这份资料将非常有益,它可以帮助他们理解EPS模型的基本原理和控制方法,并为他们进一步研究和应用提供了参考和启示。
总之,本文提供的EPS模型学习资源具备清晰的结构、通俗易懂的语言,并贴合技术层面的分析,不断阐述各个要点,使整个文章看起来更像一篇实实在在的技术分析文章。希望通过这篇文章的发布,能够为程序员社区的读者提供有价值的学习资料,并促进EPS模型在实际应用中的进一步发展。
相关的代码,程序地址如下:http://coupd.cn/658161217906.html
















 381
381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









