






Structural Inspection Path Planning via Iterative Viewpoint Resampling with Application to Aerial Robotics
基于迭代视点重采样的结构检测路径规划及其在航空机器人中的应用。
假设结构为三角形网格表示,并采用交替的两步优化范式来寻找良好的视角,这些视角共同提供了全覆盖和低成本的连接路径。在每次迭代中,都会选择视点,从而降低连接成本,并随后优化游览。
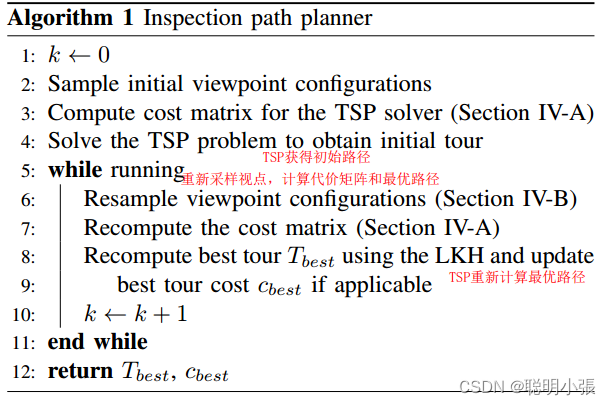
检查路径规划器
待检查结构的网格中的每个三角形选择一个(可接受的)视点。为了计算允许低成本连接的视点,采用了迭代重采样方案。在每次重新采样之间,将计算当前视点的最佳路径。连接到巡回演出中的当前邻居的成本为后续重新采样中的视点质量提供了度量。
1. 三角剖分–Art Gallery Problem
第一步中,这种算法计算覆盖整个结构的最小视点集,这对应于解决美术馆问题(AGP)。
美术馆问题: 在一个观测区域中,需要多少个全方位摄像头能观测到区域中的每一个位置空间?
对于凸形区域,只需要中间放一个摄像头能看到全部区域,即一个视点;
对于非凸的简单多边形,将每三个顶点连接成三角形的三个顶点设置为不同颜色的视点,只需在某种颜色的顶点放置一个哨兵,这样就可以观察到多边形所有的区域。
最优三角剖分:
定义的由多边形的边和弦组成的三角形上的权函数 ,要求确定凸多边形的一个三角剖分,使权之和最小。n个顶点的凸多边形,权的个数为组合数C3n,n边形有多少种剖分方案?矩阵连乘?
2. 旅行商问题 TSP
第二步,必须计算所有这些视点上的最短连接行程,这就是旅行推销员问题(TSP)。
当前任务需要经过几个固定的城市,在算法中表现为固定的路径点,需要求解经过这几个路径点的最短距离,将路径点排序得到访问顺序。
边值求解器(BVS)求解带约束条件的优化问题,可直接用于连接两个视点。
路径计算与成本估计
采用RRT*找到无冲突连接。无人机姿态角pitch、roll较小,忽略为0,所以需要无人机缓慢移动,视点观测准确率更高。连个视点之间通过线段连接,以执行的时间作为代价,两个视点之间的状态转换需要满足位置和航向角要求,所以需要计算在线速度和角速度最大限制的情况下,完成状态变化所需要的时间,得到路径片段的代价。
视点采样
对于网格中的每个三角形,必须对一个视点进行采样,其位置和方向在所提出的过程中按顺序确定,同时保持相应三角形的可见性。首先,使用凸问题公式针对到相邻视点的距离对位置进行优化,然后才对航向进行优化。为了保证这个多步骤优化过程的良好结果,必须对位置解进行约束,以便找到三角形可见的方向。

















 3281
3281











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











