







文章目录
1、原理介绍
角点介绍
图像的局部特征主要分为以下几类:
角点:Harris算子,SUSAN算子, FAST算子。
梯度特征点: SIFT、SURF、GLOH、ASIFT、PSIFT算子 等。
边缘特征(线型):Canny算子, Marr算子。
纹理特征:灰度共生矩阵,小波Gabor算子。
那么对于图像的角点判断,我们假想出一个正方形的小窗口,如果小窗口在图像以任意方向进行移动,导致图像灰度的明显变化,那么我们就可以认为小窗口内部包含了“角点”,或者当窗口足够小时,可以认为该窗口就是角点。下面我们通过一组图来了解一下:

可以看到:
当窗口位于平坦区时,任意方向移动都没有灰度变化。
当窗口位于边缘区时,沿边缘方向移动无灰度变化。
当窗口位于角点时,沿任意方向移动都会有明显的灰度变化。
Harris算子
Harris 角点检测算法(也称 Harris & Stephens 角点检测器)是一个极为简单的角点检测算法。该算法的主要思想是,如果像素周围显示存在多于一个方向的边,我们认为该点为兴趣点。该点就称为角点。
假设图像像素点(x,y)的灰度为 I(x,y),以像素点为中心的窗口沿 x 和 y 方向分别移动 u 和 v 的灰度强度变化的表达式为:

其中 E(u,v)是灰度变化,w(x,y) 是窗口函数,一般是高斯函数,所以可以把w(x,y)看做是高斯滤波器。I(x,y)是图像灰度, I(x+u,y+v)是平移后的图像灰度。
收到泰勒公式的启发,在这里我们可以将 I(x+u,y+v)函数在(x,y)处泰勒展开,为了提高抗干扰的能力并且简化运算,我们取到了一阶导数部分,后面的无穷小小量O(u2+v2)可以忽略,整理得到表达式如下:
将[ Ixu+Iyv ]展开后整理可以用矩阵表达为:
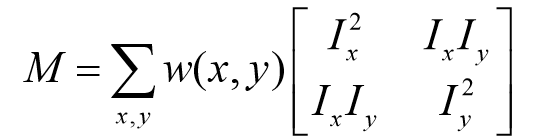
 其中M是一个2X2的矩阵,称为像素点的自相关矩阵,可以由图像的导数求得。M=窗口函数*偏导矩阵,表达式为:
其中M是一个2X2的矩阵,称为像素点的自相关矩阵,可以由图像的导数求得。M=窗口函数*偏导矩阵,表达式为:
因为u,v是局部微小的移动变量,所以我们对M进行讨论,M是一个2X2的矩阵,M的表达式中与点的位置(x,y)具体强相关性,记M得特征值为λ1,λ2,关于特征值的意义太过抽象,这里就不展开,但是我们可以简单理解为该点的灰度值变化速度,那么a1和a2可以分别看做是x方向和y方向的灰度变化速率,就可以用a1,a2两者的大小关系来进行分类:
1.当两个特征值λ1和λ2都偏小的时候,表示窗口沿任意方向移动都会使灰度变化很细微,该点处于图像的平坦区域。
2.当λ1>>λ2或者λ1<<λ2时,说明该点向水平(垂直)方向移动时变化会很明显,而向垂直(水平)方向则变化不明显,该点处于图像的边缘区。
3.当两个特征值λ1和λ2都很大的时候,表示窗口沿任意方向移动都会使灰度变化很明显,该点位置就是图像角点的位置。
2、代码设计
# -*- coding: utf-8 -*
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
"""
Example of detecting Harris corner points (Figure 2-1 in the book).
"""
# 读入图像
im = array(Image.open( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1264
1264











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









