






OCC模块概览
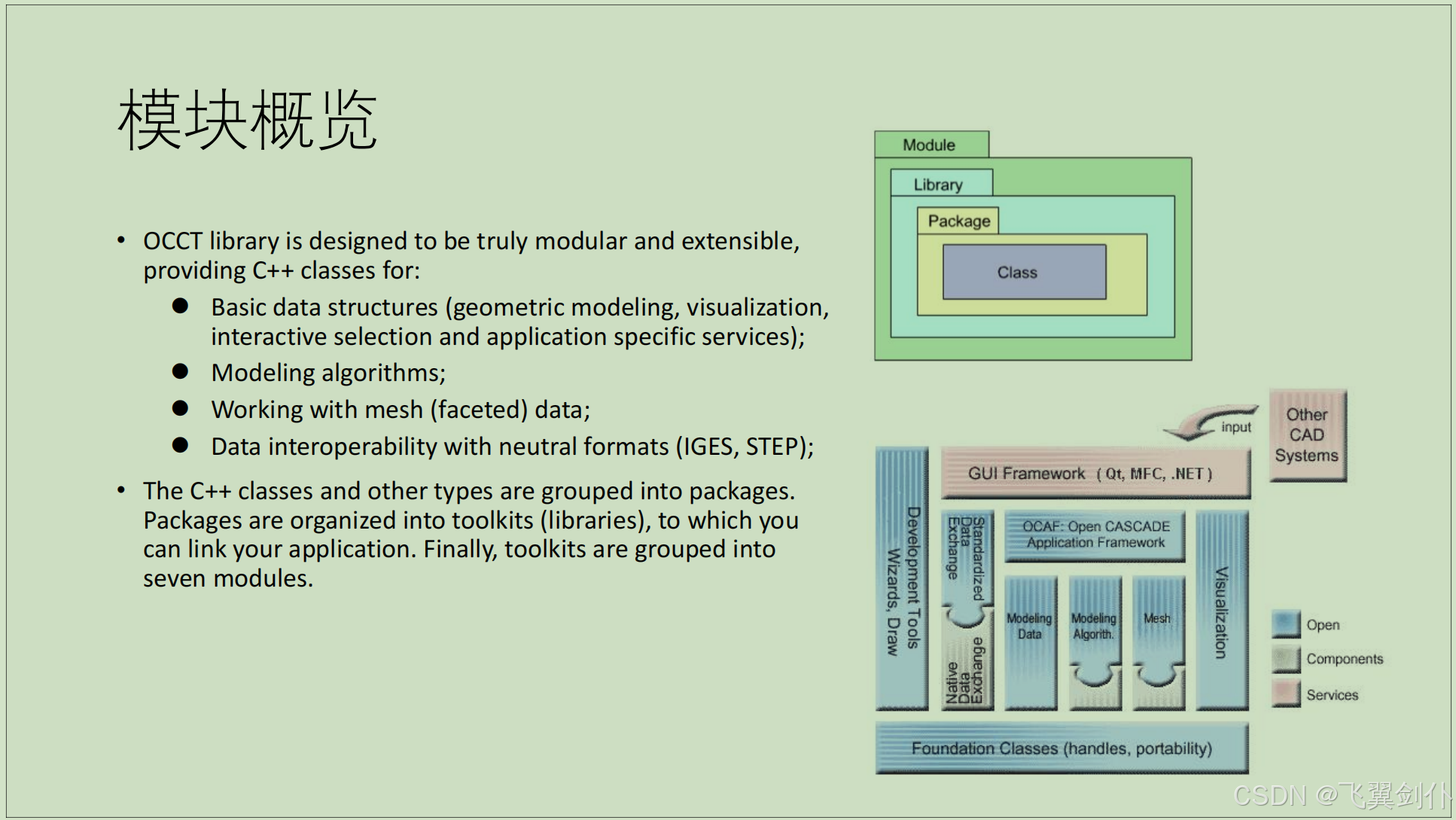
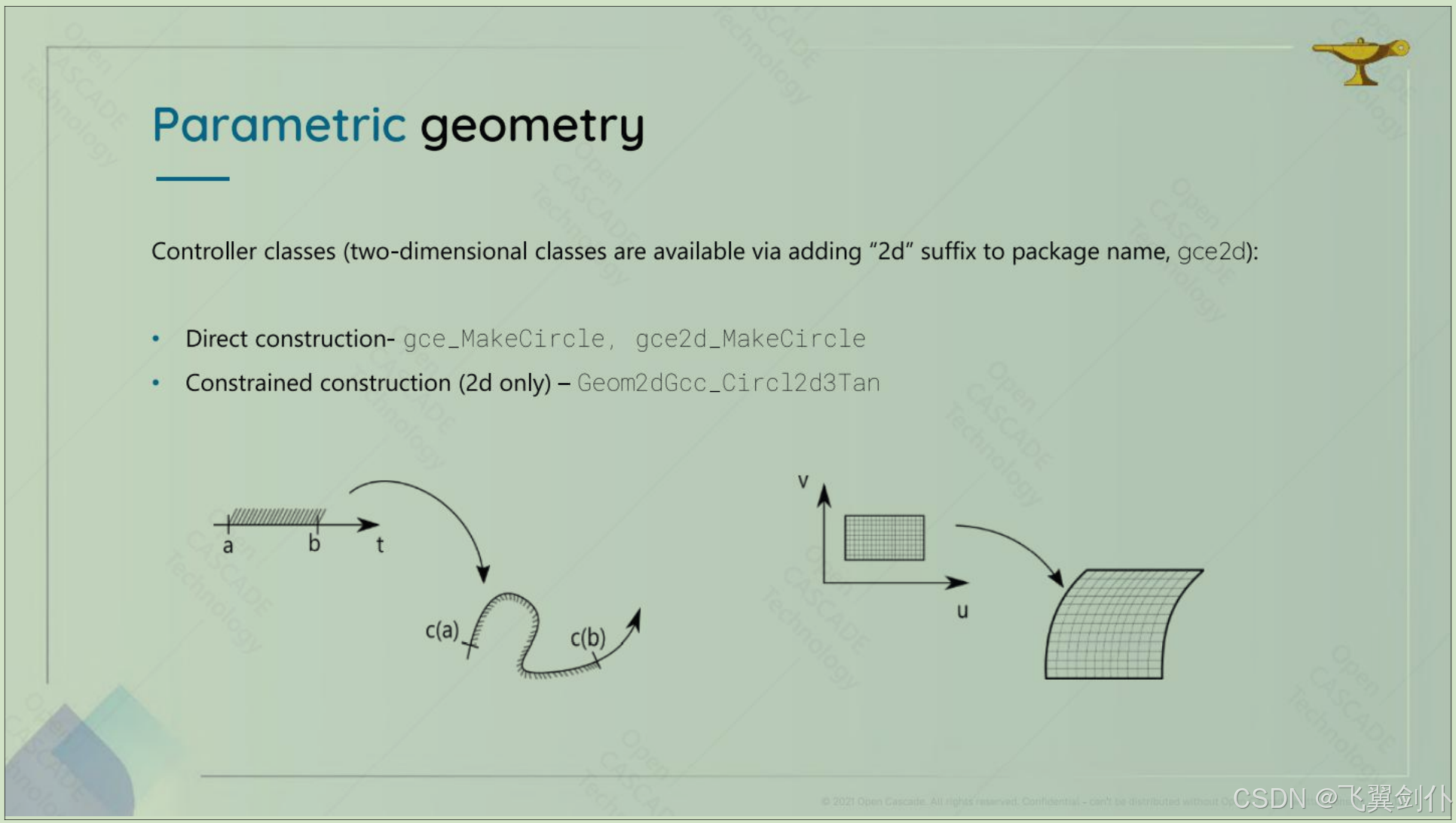
参数几何(曲线与曲面类型)
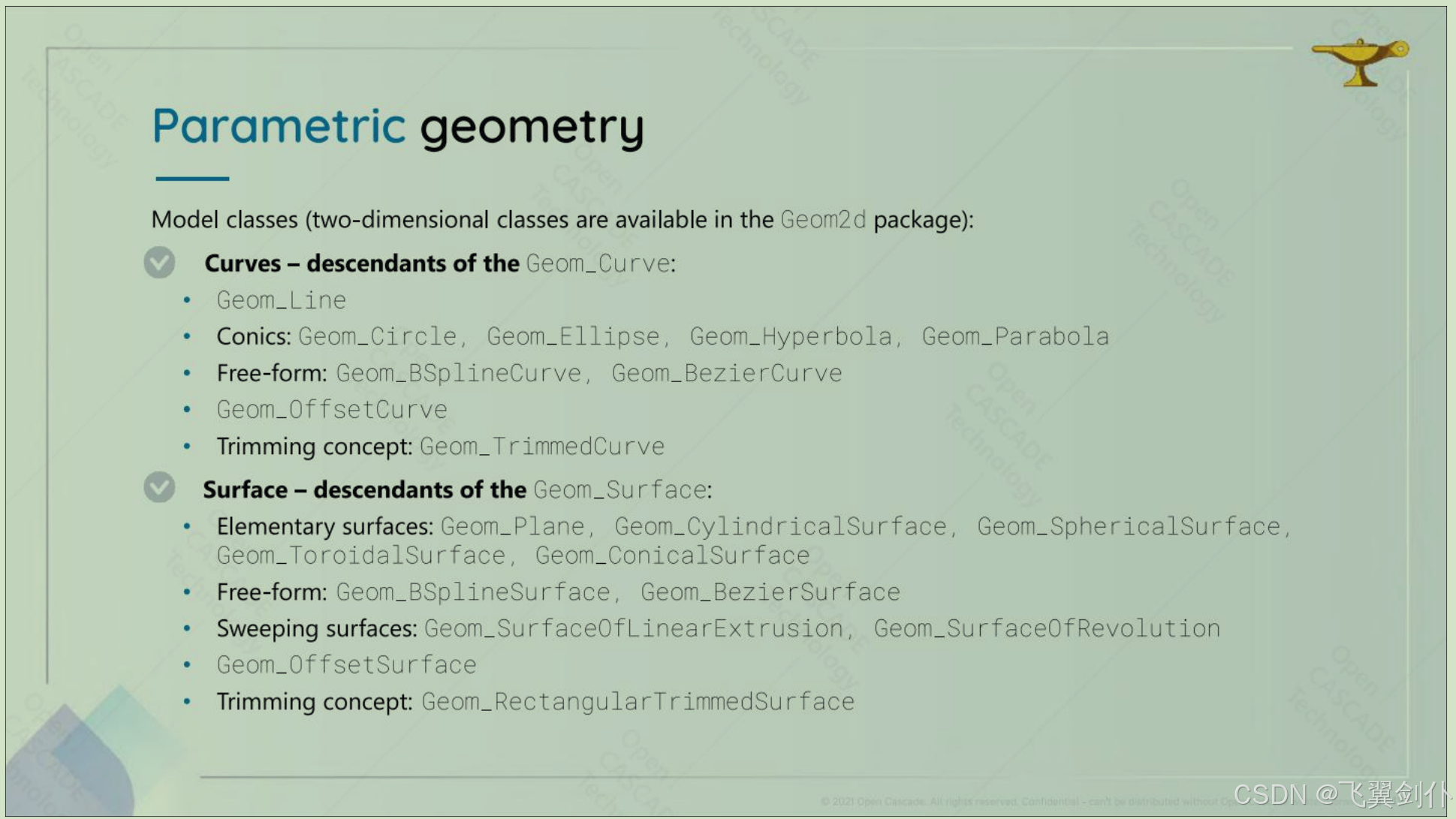
参数
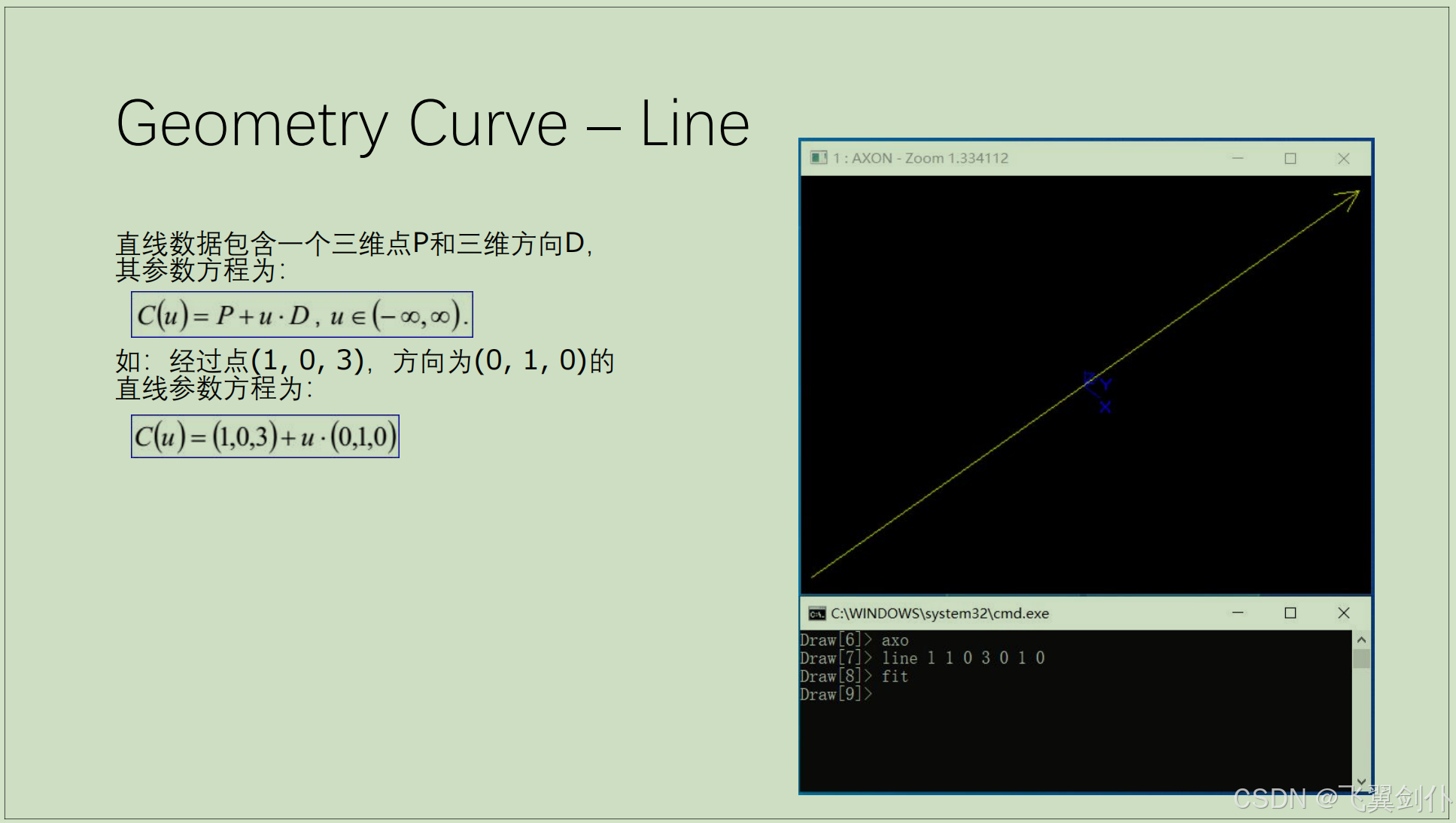
直线
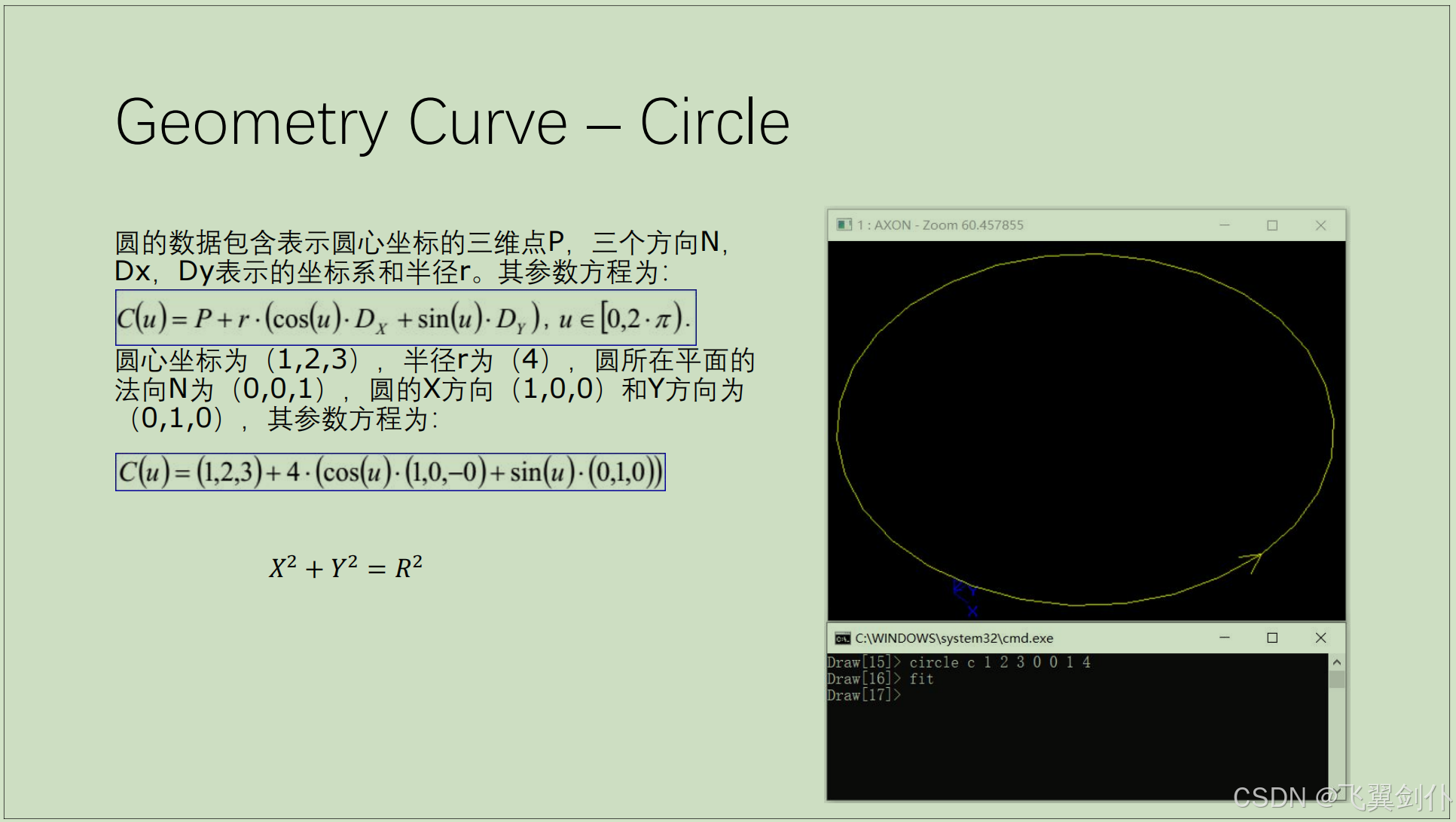
圆
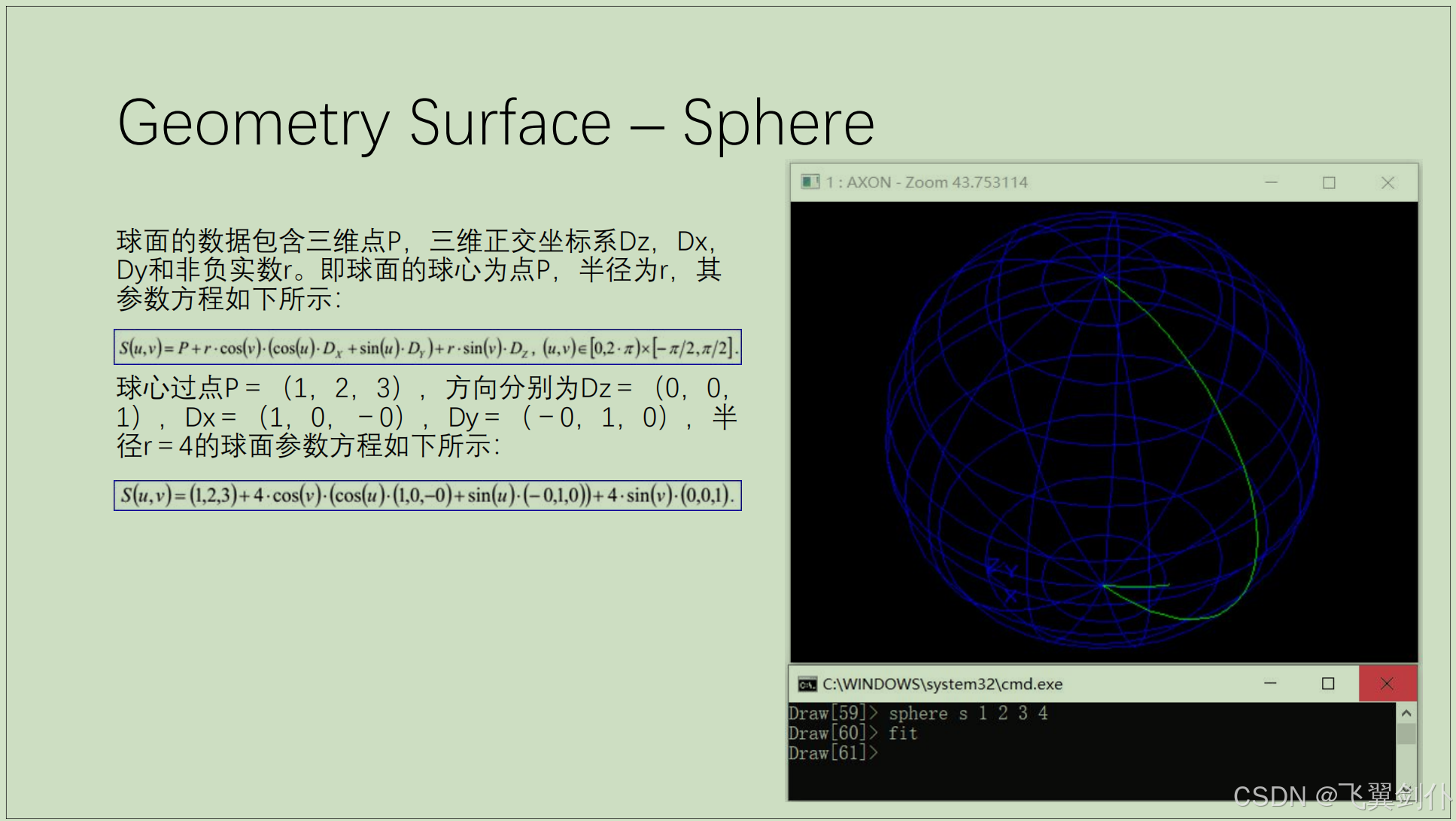
球
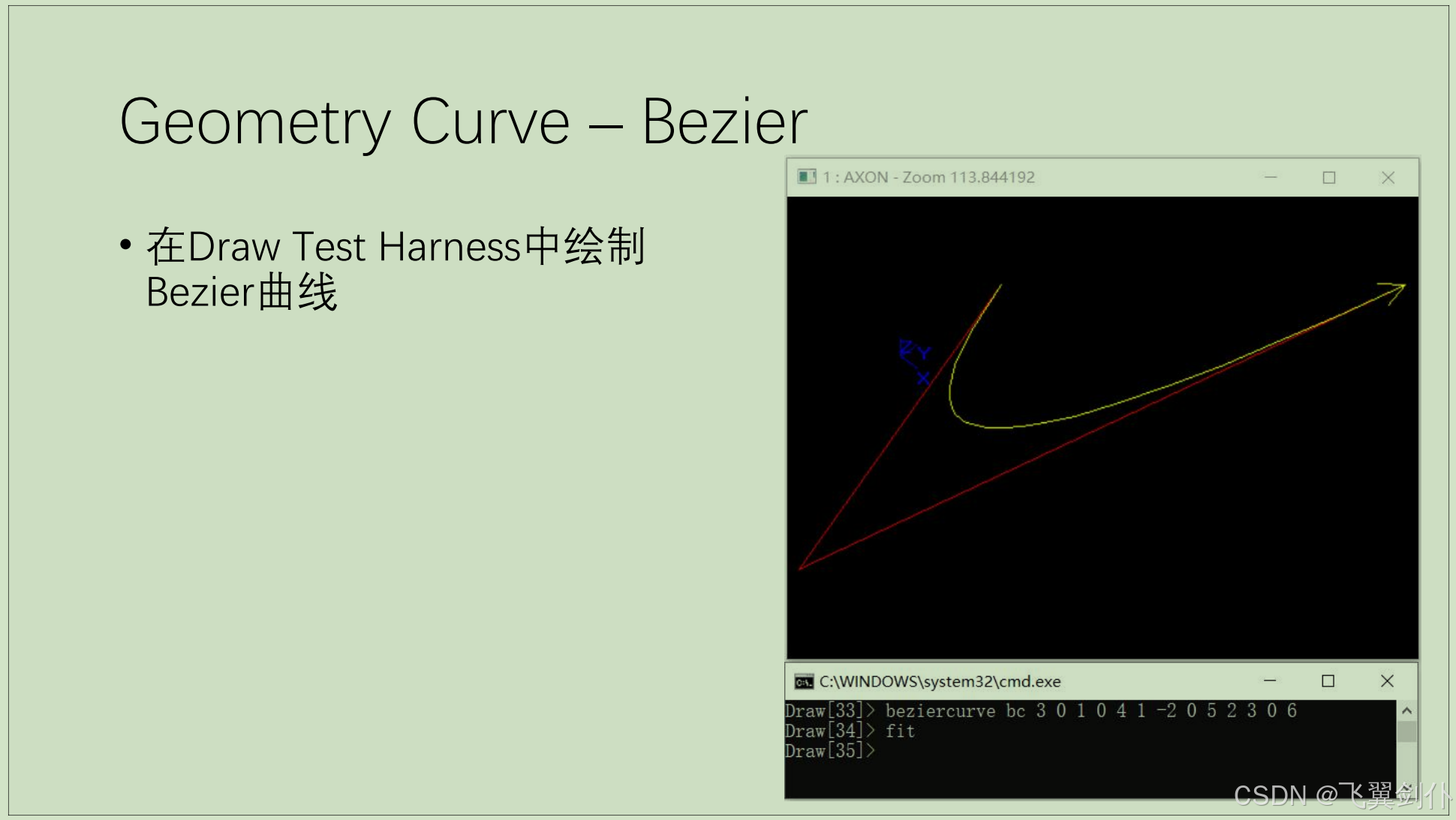
Bezier曲线
在Draw Test Harness中绘制Bezier曲线命令:
beziercurve bc 3 0 1 0 4 1 -2 0 5 2 3 0 6
fit
圆的参数方程与隐式方程式的转换
在解析几何中,圆的参数方程和隐式方程之间的转换可以通过代数操作实现。以下我们将详细讲解如何将圆的参数方程转换为隐式方程,以及如何将隐式方程转换回参数方程。
1. 圆的参数方程
圆的参数方程通常表示为:
{ x = h + r cos θ y = k + r sin θ \begin{cases} x = h + r \cos \theta \\ y = k + r \sin \theta \end{cases} {x=h+rcosθy=k+rsinθ
其中:
- ( h , k ) (h, k) (h,k) 是圆心坐标,
- r r r 是圆的半径,
- θ \theta θ 是参数,取值范围通常是 0 ≤ θ < 2 π 0 \leq \theta < 2\pi 0≤θ<2π。
在原点处的圆,即:
h
=
0
k
=
0
h = 0 \\ k = 0
h=0k=0
则:
{
x
=
r
cos
θ
y
=
r
sin
θ
\begin{cases} x = r \cos \theta \\ y = r \sin \theta \end{cases}
{x=rcosθy=rsinθ
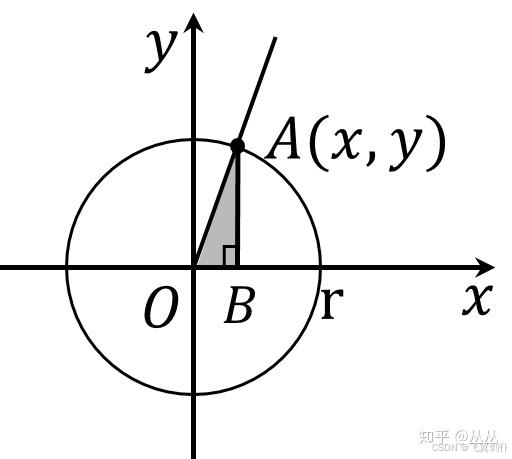
理解:
参数方程使用一个变量(如
θ
\theta
θ)来描述x和y的变化。当
θ
\theta
θ 从0变化到
2
π
2\pi
2π 时,点
(
x
,
y
)
(x, y)
(x,y) 沿着圆移动一周。
2. 将参数方程转换为隐式方程
要将参数方程转换为隐式方程(即标准形式的圆的方程),我们可以利用三角恒等式 cos 2 θ + sin 2 θ = 1 \cos^2 \theta + \sin^2 \theta = 1 cos2θ+sin2θ=1。具体步骤如下:
步骤 1:分离参数
从参数方程中解出
cos
θ
\cos \theta
cosθ 和
sin
θ
\sin \theta
sinθ:
cos
θ
=
x
−
h
r
sin
θ
=
y
−
k
r
\cos \theta = \frac{x - h}{r} \\ \sin \theta = \frac{y - k}{r}
cosθ=rx−hsinθ=ry−k
步骤 2:代入三角恒等式
将
cos
θ
\cos \theta
cosθ 和
sin
θ
\sin \theta
sinθ 代入
cos
2
θ
+
sin
2
θ
=
1
\cos^2 \theta + \sin^2 \theta = 1
cos2θ+sin2θ=1:
(
x
−
h
r
)
2
+
(
y
−
k
r
)
2
=
1
\left( \frac{x - h}{r} \right)^2 + \left( \frac{y - k}{r} \right)^2 = 1
(rx−h)2+(ry−k)2=1
步骤 3:化简为标准形式
两边同时乘以
r
2
r^2
r2,得到:
(
x
−
h
)
2
+
(
y
−
k
)
2
=
r
2
(x - h)^2 + (y - k)^2 = r^2
(x−h)2+(y−k)2=r2
这就是圆的隐式方程。
3. 将隐式方程转换为参数方程
将隐式方程 ( x − h ) 2 + ( y − k ) 2 = r 2 (x - h)^2 + (y - k)^2 = r^2 (x−h)2+(y−k)2=r2 转换为参数方程,可以通过引入参数 θ \theta θ 来表示圆上的点。具体步骤如下:
步骤 1:引入参数
假设
x
x
x 和
y
y
y 可以用角度
θ
\theta
θ 表示:
{
x
=
h
+
r
cos
θ
y
=
k
+
r
sin
θ
\begin{cases} x = h + r \cos \theta \\ y = k + r \sin \theta \end{cases}
{x=h+rcosθy=k+rsinθ
其中,
θ
\theta
θ 是从圆心到圆上某点的连线与 x 轴正方向之间的夹角。
步骤 2:验证参数方程满足隐式方程
将
x
=
h
+
r
cos
θ
x = h + r \cos \theta
x=h+rcosθ 和
y
=
k
+
r
sin
θ
y = k + r \sin \theta
y=k+rsinθ 代入隐式方程:
(
x
−
h
)
2
+
(
y
−
k
)
2
=
(
r
cos
θ
)
2
+
(
r
sin
θ
)
2
=
r
2
(
cos
2
θ
+
sin
2
θ
)
=
r
2
(x - h)^2 + (y - k)^2 = (r \cos \theta)^2 + (r \sin \theta)^2 = r^2 (\cos^2 \theta + \sin^2 \theta) = r^2
(x−h)2+(y−k)2=(rcosθ)2+(rsinθ)2=r2(cos2θ+sin2θ)=r2
满足隐式方程。
4. 总结
- 参数方程:通过角度
θ
\theta
θ 描述圆上点的位置,形式为:
{ x = h + r cos θ y = k + r sin θ \begin{cases} x = h + r \cos \theta \\ y = k + r \sin \theta \end{cases} {x=h+rcosθy=k+rsinθ - 隐式方程:不涉及参数,直接描述圆上点的坐标关系,形式为:
( x − h ) 2 + ( y − k ) 2 = r 2 (x - h)^2 + (y - k)^2 = r^2 (x−h)2+(y−k)2=r2
通过上述方法,可以实现圆的参数方程和隐式方程之间的相互转换。
球面的参数方程与隐式方程式的转换
在解析几何中,球面的参数方程和隐式方程之间可以通过坐标变换进行相互转换。以下是一步步的解释:
1. 球面的隐式方程
球面在三维空间中的隐式方程通常表示为:
(
x
−
h
)
2
+
(
y
−
k
)
2
+
(
z
−
l
)
2
=
r
2
(x - h)^2 + (y - k)^2 + (z - l)^2 = r^2
(x−h)2+(y−k)2+(z−l)2=r2
其中:
- ( h , k , l ) (h, k, l) (h,k,l) 是球心坐标,
- r r r 是球的半径。
这个方程描述了三维空间中所有到中心点 ( h , k , l ) (h, k, l) (h,k,l) 的距离为 r r r 的点。
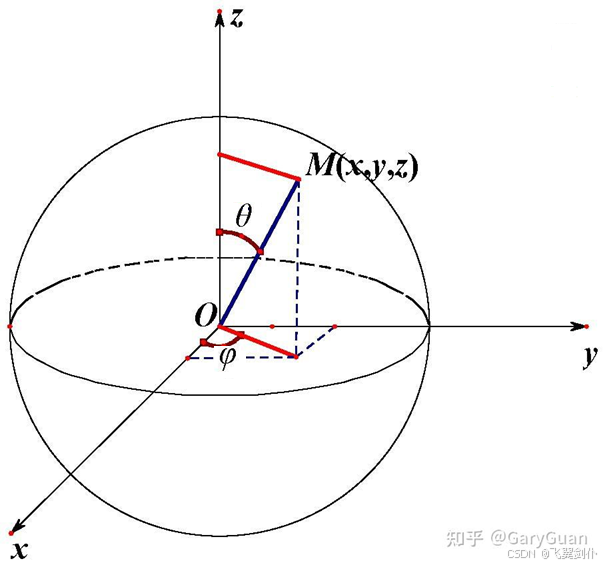
2. 球面的参数方程
球面可以用两个角度参数
θ
\theta
θ 和
ϕ
\phi
ϕ 来表示,通常称为极角(polar angle)和方位角(azimuthal angle)。参数方程的形式如下:
{
x
=
h
+
r
sin
θ
cos
ϕ
y
=
k
+
r
sin
θ
sin
ϕ
z
=
l
+
r
cos
θ
\begin{cases} x = h + r \sin\theta \cos\phi \\ y = k + r \sin\theta \sin\phi \\ z = l + r \cos\theta \end{cases}
⎩
⎨
⎧x=h+rsinθcosϕy=k+rsinθsinϕz=l+rcosθ
其中:
- 0 ≤ θ ≤ π 0 \leq \theta \leq \pi 0≤θ≤π 是极角,表示点与球心的连线与 z z z-轴之间的夹角,
- 0 ≤ ϕ < 2 π 0 \leq \phi < 2\pi 0≤ϕ<2π 是方位角,表示在水平面( x x x- y y y 平面)上的旋转角度。
在原点处的球面,即:
h
=
0
k
=
0
l
=
0
h = 0 \\ k = 0 \\ l = 0
h=0k=0l=0
则:
{
x
=
r
sin
θ
cos
ϕ
y
=
r
sin
θ
sin
ϕ
z
=
r
cos
θ
\begin{cases} x = r \sin\theta \cos\phi \\ y = r \sin\theta \sin\phi \\ z = r \cos\theta \end{cases}
⎩
⎨
⎧x=rsinθcosϕy=rsinθsinϕz=rcosθ
3. 隐式方程到参数方程的转换
假设我们有球面的隐式方程:
(
x
−
h
)
2
+
(
y
−
k
)
2
+
(
z
−
l
)
2
=
r
2
(x - h)^2 + (y - k)^2 + (z - l)^2 = r^2
(x−h)2+(y−k)2+(z−l)2=r2
我们可以引入球坐标系来将其转化为参数方程。
步骤 1:定义参数化
在三维空间中,球面对称性非常适合使用球坐标系来表示。我们可以用两个角度 θ \theta θ 和 ϕ \phi ϕ 来描述球面上的每一点:
- θ \theta θ 是从 z z z-轴向下测量的角度,
- ϕ \phi ϕ 是绕 z z z-轴旋转的角度。
步骤 2:引入球坐标变换
将隐式方程中的
x
,
y
,
z
x, y, z
x,y,z 用球坐标参数化表示:
{
x
=
h
+
r
sin
θ
cos
ϕ
y
=
k
+
r
sin
θ
sin
ϕ
z
=
l
+
r
cos
θ
\begin{cases} x = h + r \sin\theta \cos\phi \\ y = k + r \sin\theta \sin\phi \\ z = l + r \cos\theta \end{cases}
⎩
⎨
⎧x=h+rsinθcosϕy=k+rsinθsinϕz=l+rcosθ
其中
r
r
r 是半径,固定不变。
步骤 3:验证参数方程满足隐式方程
将参数方程代入隐式方程:
(
x
−
h
)
2
+
(
y
−
k
)
2
+
(
z
−
l
)
2
=
r
2
(x - h)^2 + (y - k)^2 + (z - l)^2 = r^2
(x−h)2+(y−k)2+(z−l)2=r2
代入
x
,
y
,
z
x, y, z
x,y,z 的表达式:
[
r
sin
θ
cos
ϕ
]
2
+
[
r
sin
θ
sin
ϕ
]
2
+
[
r
cos
θ
]
2
=
r
2
(
sin
2
θ
cos
2
ϕ
)
+
r
2
(
sin
2
θ
sin
2
ϕ
)
+
r
2
cos
2
θ
=
r
2
sin
2
θ
(
cos
2
ϕ
+
sin
2
ϕ
)
+
r
2
cos
2
θ
=
r
2
sin
2
θ
(
1
)
+
r
2
cos
2
θ
=
r
2
(
sin
2
θ
+
cos
2
θ
)
=
r
2
\begin{aligned} &[r \sin\theta \cos\phi]^2 + [r \sin\theta \sin\phi]^2 + [r \cos\theta]^2 \\ &= r^2 (\sin^2\theta \cos^2\phi) + r^2 (\sin^2\theta \sin^2\phi) + r^2 \cos^2\theta \\ &= r^2 \sin^2\theta (\cos^2\phi + \sin^2\phi) + r^2 \cos^2\theta \\ &= r^2 \sin^2\theta (1) + r^2 \cos^2\theta \\ &= r^2 (\sin^2\theta + \cos^2\theta) \\ &= r^2 \end{aligned}
[rsinθcosϕ]2+[rsinθsinϕ]2+[rcosθ]2=r2(sin2θcos2ϕ)+r2(sin2θsin2ϕ)+r2cos2θ=r2sin2θ(cos2ϕ+sin2ϕ)+r2cos2θ=r2sin2θ(1)+r2cos2θ=r2(sin2θ+cos2θ)=r2
这验证了参数方程确实满足隐式方程。
4. 参数方程到隐式方程的转换
假设我们有球面的参数方程:
{
x
=
h
+
r
sin
θ
cos
ϕ
y
=
k
+
r
sin
θ
sin
ϕ
z
=
l
+
r
cos
θ
\begin{cases} x = h + r \sin\theta \cos\phi \\ y = k + r \sin\theta \sin\phi \\ z = l + r \cos\theta \end{cases}
⎩
⎨
⎧x=h+rsinθcosϕy=k+rsinθsinϕz=l+rcosθ
我们需要将其转换为隐式方程。
步骤 1:消去参数 θ \theta θ 和 ϕ \phi ϕ
从参数方程中解出
sin
θ
cos
ϕ
\sin\theta \cos\phi
sinθcosϕ、
sin
θ
sin
ϕ
\sin\theta \sin\phi
sinθsinϕ 和
cos
θ
\cos\theta
cosθ:
{
x
−
h
=
r
sin
θ
cos
ϕ
y
−
k
=
r
sin
θ
sin
ϕ
z
−
l
=
r
cos
θ
\begin{cases} x - h = r \sin\theta \cos\phi \\ y - k = r \sin\theta \sin\phi \\ z - l = r \cos\theta \end{cases}
⎩
⎨
⎧x−h=rsinθcosϕy−k=rsinθsinϕz−l=rcosθ
步骤 2:平方并相加
将前两个方程分别平方:
(
x
−
h
)
2
=
r
2
sin
2
θ
cos
2
ϕ
,
(
y
−
k
)
2
=
r
2
sin
2
θ
sin
2
ϕ
(x - h)^2 = r^2 \sin^2\theta \cos^2\phi, \quad (y - k)^2 = r^2 \sin^2\theta \sin^2\phi
(x−h)2=r2sin2θcos2ϕ,(y−k)2=r2sin2θsin2ϕ
将它们相加:
(
x
−
h
)
2
+
(
y
−
k
)
2
=
r
2
sin
2
θ
(
cos
2
ϕ
+
sin
2
ϕ
)
=
r
2
sin
2
θ
(x - h)^2 + (y - k)^2 = r^2 \sin^2\theta (\cos^2\phi + \sin^2\phi) = r^2 \sin^2\theta
(x−h)2+(y−k)2=r2sin2θ(cos2ϕ+sin2ϕ)=r2sin2θ
同时,对第三个方程平方:
(
z
−
l
)
2
=
r
2
cos
2
θ
(z - l)^2 = r^2 \cos^2\theta
(z−l)2=r2cos2θ
步骤 3:相加得到隐式方程
将上述两个结果相加:
(
x
−
h
)
2
+
(
y
−
k
)
2
+
(
z
−
l
)
2
=
r
2
sin
2
θ
+
r
2
cos
2
θ
=
r
2
(
sin
2
θ
+
cos
2
θ
)
=
r
2
(x - h)^2 + (y - k)^2 + (z - l)^2 = r^2 \sin^2\theta + r^2 \cos^2\theta = r^2 (\sin^2\theta + \cos^2\theta) = r^2
(x−h)2+(y−k)2+(z−l)2=r2sin2θ+r2cos2θ=r2(sin2θ+cos2θ)=r2
这就得到了球面的隐式方程:
(
x
−
h
)
2
+
(
y
−
k
)
2
+
(
z
−
l
)
2
=
r
2
(x - h)^2 + (y - k)^2 + (z - l)^2 = r^2
(x−h)2+(y−k)2+(z−l)2=r2
总结
- 球面的隐式方程是关于 x , y , z x, y, z x,y,z 的二次方程,描述了所有到球心距离为 r r r 的点。
- 球面的参数方程使用两个角度 θ \theta θ 和 ϕ \phi ϕ 来表示球面上的任意一点。
- 通过将参数方程代入隐式方程并利用三角恒等式,可以验证两者的一致性。
- 反过来,通过消去参数 θ \theta θ 和 ϕ \phi ϕ 并平方相加,可以从参数方程推导出隐式方程。
参数曲线与离散函数表
源码文件:OCCT-7_9_0\src\ElCLib\ElCLib.cxx
| 曲线类型 | 离散函数 |
|---|---|
| 直线 | gp_Pnt2d ElCLib::LineValue(const Standard_Real U, const gp_Ax2d& Pos) |
| 圆 | gp_Pnt2d ElCLib::CircleValue(const Standard_Real U, const gp_Ax22d& Pos, const Standard_Real Radius) |
| 椭圆 | gp_Pnt2d ElCLib::EllipseValue(const Standard_Real U, const gp_Ax22d& Pos, const Standard_Real MajorRadius, const Standard_Real MinorRadius) |
| 抛物线 | gp_Pnt2d ElCLib::ParabolaValue(const Standard_Real U, const gp_Ax22d& Pos, const Standard_Real Focal) |
| 双曲线 | gp_Pnt2d ElCLib::HyperbolaValue(const Standard_Real U, const gp_Ax22d& Pos, const Standard_Real MajorRadius, const Standard_Real MinorRadius) |
| 样条曲线 | BSplCLib |
参数曲面与离散函数表
源码文件:OCCT-7_9_0\src\ElSLib\ElSLib.cxx
| 曲面类型 | 离散函数 |
|---|---|
| 平面 | void ElSLib::PlaneD0(const Standard_Real U, const Standard_Real V, const gp_Ax3& Pos, gp_Pnt& P) |
| 圆柱面 | void ElSLib::CylinderD0(const Standard_Real U, const Standard_Real V, const gp_Ax3& Pos, const Standard_Real Radius, gp_Pnt& P) |
| 圆柱面 | void ElSLib::ConeD0(const Standard_Real U, const Standard_Real V, const gp_Ax3& Pos, const Standard_Real Radius, const Standard_Real SAngle, gp_Pnt& P) |
| 球面 | void ElSLib::SphereD0(const Standard_Real U, const Standard_Real V, const gp_Ax3& Pos, const Standard_Real Radius, gp_Pnt& P) |
| 圆环面 | void ElSLib::TorusD0(const Standard_Real U, const Standard_Real V, const gp_Ax3& Pos, const Standard_Real MajorRadius, const Standard_Real MinorRadius, gp_Pnt& P) |
| 样条曲面 | BSplSLib |
参考文档:
- 刘星《基于Open Cascade的开发培训》(bilibili.com)
- OCC官网(https://dev.opencascade.org/release)
- A Primer on Bézier Curves
- https://zhuanlan.zhihu.com/p/421129261
- https://zhuanlan.zhihu.com/p/55878540


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









