







目录
效果
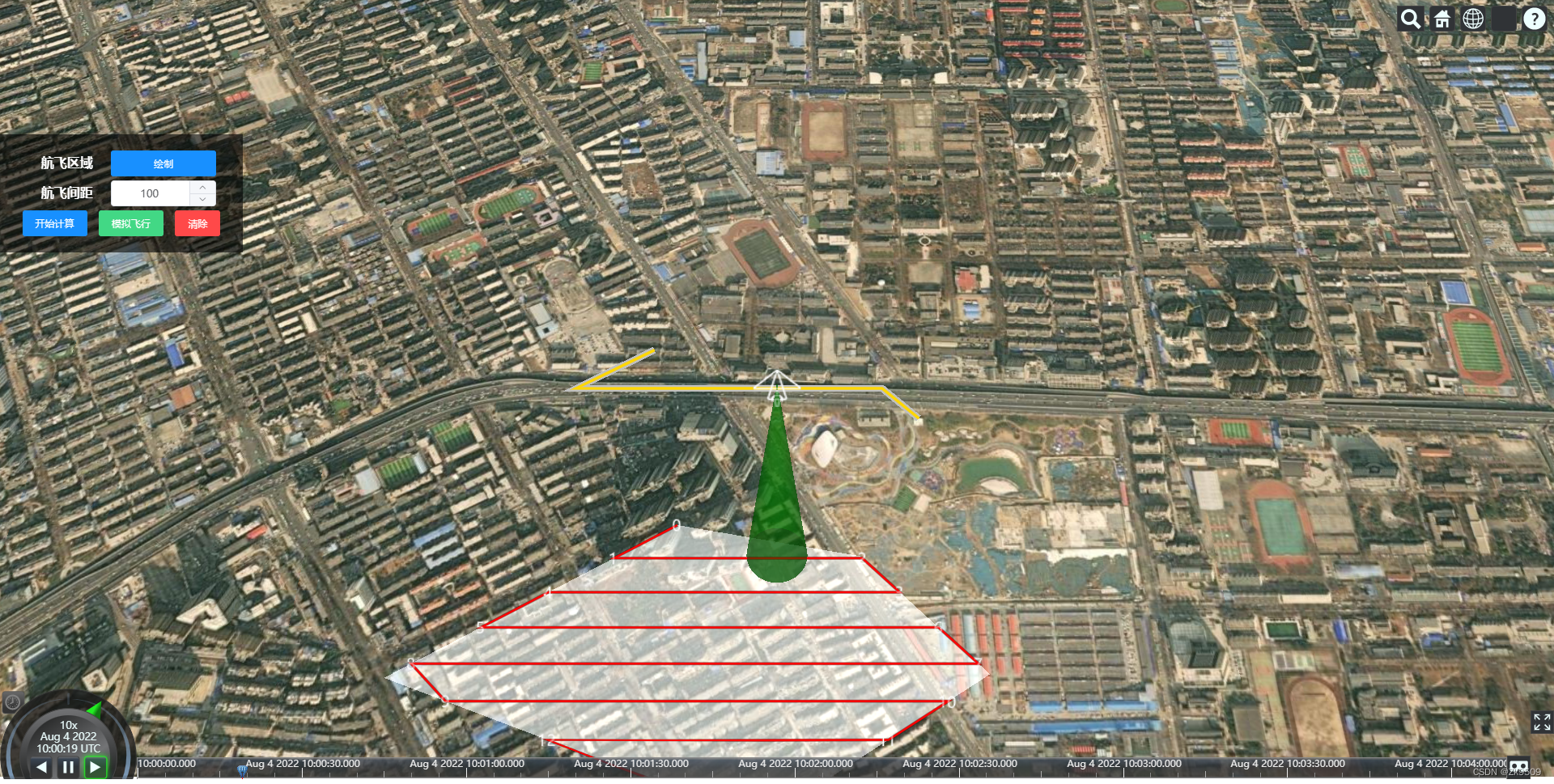
动图:
源码
vue2+elementUI+cesium1.97,功能源码已整理到单个文件中。单独运行需要引入cesium、elementUI和turf.js,原理看注释基本都能看懂。上源码:
<template>
<!-- 航线规划 -->
<div class="uvaRoutePlanBox" :class="{ hide: !isShow, show: isShow }">
<div id="cesiumContainerBox" />
<div
id="toolTip"
style="display: none;pointer-events: none;position: fixed;background: rgba(0,0,0,0.5);z-index: 1000;opacity: 0.8;border-radius: 4px;padding: 4px 8px;white-space: nowrap;font-family:黑体;color:white;font-weight: bolder;font-size: 14px;"
/>
<div class="body">
<div class="form-item">
<span class="form-label">
航飞区域
</span>
<div class="form-connect">
<el-button type="primary" style="width:130px;" @click="drawPoly">
绘制
</el-button>
</div>
</div>
<div class="form-item">
<span class="form-label">航飞间距</span>
<div class="form-connect">
<el-input-number
v-model="hfDistance"
controls-position="right"
:min="10"
:step="10"
@change="distanceHandleChange"
/>
</div>
</div>
<div class="form-item">
<div class="form-connect">
<el-button type="primary" @click="beginCalc">
开始计算
</el-button>
<el-button type="success" @click="moniFly">
模拟飞行
</el-button>
<el-button type="danger" @click="cleanEntity">清除</el-button>
</div>
</div>
</div>
</div>
</template>
<script>
import * as Cesium from '@assets/Cesium'
import * as turf from '@turf/turf'
var polyArr = [] // 面数据
var jdArrs = [] // 交点集合
export default {
name: 'UvaRoutePlan',
components: {},
props: [],
data() {
return { isShow: true, hfDistance: 100, isFly: false }
},
watch: {},
created() {
this.$nextTick(function() {
this.startInit()
})
},
mounted() {},
methods: {
startInit() {
const key =
'你的token'
Cesium.Ion.defaultAccessToken = key
var viewer = new Cesium.Viewer('cesiumContainerBox', {
imageryProvider: new Cesium.ArcGisMapServerImageryProvider({
url:
'https://services.arcgisonline.com/ArcGIS/rest/services/World_Imagery/MapServer'
}),
geocoder: true,
homeButton: true,
sceneModePicker: true,
baseLayerPicker: true,
navigationHelpButton: true,
shouldAnimate: true,
animation: true,
timeline: true,
fullscreenButton: true,
vrButton: true,
// 关闭点选出现的提示框
selectionIndicator: false,
infoBox: false
})
viewer._cesiumWidget._creditContainer.style.display = 'none' // 隐藏版权
viewer.camera.flyTo({
destination: Cesium.Cartesian3.fromDegrees(
113.6440552299206,
34.78411814959118,
2000
),
orientation: {
heading: Cesium.Math.toRadians(0.0), // 左右方向
pitch: Cesium.Math.toRadians(-90.0), // 上下方向
roll: Cesium.Math.toRadians(0) // 镜头(屏幕)到定位目标点(实体)的距离
},
duration: 3 // 执行定位动画的时间
})
window.viewer = viewer
},
endClose() {
this.cleanEntity()
},
// 画航飞区域
drawPoly() {
var viewer = window.viewer
this.cleanEntity()
var handler = new Cesium.ScreenSpaceEventHandler(viewer.scene.canvas)
// 鼠标事件
handler = new Cesium.ScreenSpaceEventHandler(
viewer.scene._imageryLayerCollection
)
polyArr = []
var positions = []
var tempPoints = []
var polygon = null
var tooltip = document.getElementById('toolTip')
var cartesian = null
// 鼠标移动事件
handler.setInputAction(function(movement) {
tooltip.style.left = movement.endPosition.x + 3 + 'px'
tooltip.style.top = movement.endPosition.y - 25 + 'px'
tooltip.innerHTML = '<p>单击开始,右击结束</p>'
const ray = viewer.camera.getPickRay(movement.endPosition)
cartesian = viewer.scene.globe.pick(ray, viewer.scene)
if (positions.length >= 2) {
if (!Cesium.defined(polygon)) {
polygon = new PolygonPrimitive(positions)
} else {
positions.pop()
positions.push(cartesian)
}
}
}, Cesium.ScreenSpaceEventType.MOUSE_MOVE)
// 左击鼠标事件
handler.setInputAction(function(movement) {
tooltip.style.display = 'block'
tooltip.style.left = movement.position.x + 3 + 'px'
tooltip.style.top = movement.position.y - 25 + 'px'
tooltip.innerHTML = '<p>单击开始,右击结束</p>'
const ray = viewer.camera.getPickRay(movement.position)
cartesian = viewer.scene.globe.pick(ray, viewer.scene)
if (positions.length === 0) {
positions.push(cartesian.clone())
}
// positions.pop();
positions.push(cartesian)
// 在三维场景中添加点
var cartographic = Cesium.Cartographic.fromCartesian(
positions[positions.length - 1]
)
var longitudeString = Cesium.Math.toDegrees(cartographic.longitude)
var latitudeString = Cesium.Math.toDegrees(cartographic.latitude)
var heightString = cartographic.height
tempPoints.push({
lon: longitudeString,
lat: latitudeString,
hei: heightString
})
}, Cesium.ScreenSpaceEventType.LEFT_CLICK)
// 右击鼠标事件
handler.setInputAction(function() {
handler.destroy()
tooltip.style.display = 'none'
positions.pop()
polyArr = positions
}, Cesium.ScreenSpaceEventType.RIGHT_CLICK)
var PolygonPrimitive = (function() {
function _(positions) {
this.options = {
name: 'uav-poly',
polygon: {
hierarchy: [],
// perPositionHeight : true,
material: Cesium.Color.fromCssColorString('#fafafa').withAlpha(
0.5
)
}
}
this.hierarchy = { positions }
this._init()
}
_.prototype._init = function() {
var _self = this
var _update = function() {
return _self.hierarchy
}
// 实时更新polygon.hierarchy
this.options.polygon.hierarchy = new Cesium.CallbackProperty(
_update,
false
)
viewer.entities.add(this.options)
}
return _
})()
},
// 开始计算
beginCalc() {
if (polyArr.length === 0) {
this.$message.warning('未检测到航飞区域')
return
}
var viewer = window.viewer
// 清除之前计算结果entity
this.cesium.removeEntityLikeName(viewer, 'uav-tmp')
var geodesic = Cesium.BoundingRectangle.fromPoints(polyArr) // 外接矩形获取
var rectangle = Cesium.Rectangle.fromCartesianArray(polyArr) // 外接矩形获取
// 把面拆分成线并转换为经纬度格式存储
var polyLines = []
polyArr.map((res, index) => {
var tmp = []
var ellipsoid = viewer.scene.globe.ellipsoid
var cartesian3 = new Cesium.Cartesian3(res.x, res.y, res.z)
var cartographic = ellipsoid.cartesianToCartographic(cartesian3)
var cartesian31 = null
var cartographic1 = null
if (index === polyArr.length - 1) {
// 最后一个点连接顶点
cartesian31 = new Cesium.Cartesian3(
polyArr[0].x,
polyArr[0].y,
polyArr[0].z
)
cartographic1 = ellipsoid.cartesianToCartographic(cartesian31)
tmp.push([
[
Cesium.Math.toDegrees(cartographic.longitude),
Cesium.Math.toDegrees(cartographic.latitude)
],
[
Cesium.Math.toDegrees(cartographic1.longitude),
Cesium.Math.toDegrees(cartographic1.latitude)
]
])
} else {
cartesian31 = new Cesium.Cartesian3(
polyArr[index + 1].x,
polyArr[index + 1].y,
polyArr[index + 1].z
)
cartographic1 = ellipsoid.cartesianToCartographic(cartesian31)
tmp.push([
[
Cesium.Math.toDegrees(cartographic.longitude),
Cesium.Math.toDegrees(cartographic.latitude)
],
[
Cesium.Math.toDegrees(cartographic1.longitude),
Cesium.Math.toDegrees(cartographic1.latitude)
]
])
}
polyLines.push(tmp)
})
// 等高分割矩形
var bool = geodesic.width < geodesic.height
var len = Math.floor(geodesic.height / (this.hfDistance / 2)) // 高度分割数量
var step = rectangle.height / len // 步长
if (bool) {
len = Math.floor(geodesic.width / (this.hfDistance / 2)) // 宽度分割数量
step = rectangle.width / len // 步长
}
jdArrs = [] // 交点集合
// console.log(rectangle, len, step)
for (var i = 0; i < len; i++) {
var tmp = null
if (bool) {
tmp = new Cesium.Rectangle(
rectangle.east - step * (i + 1),
rectangle.south,
rectangle.east - step * i,
rectangle.north
)
} else {
tmp = new Cesium.Rectangle(
rectangle.west,
rectangle.north - step * (i + 1),
rectangle.east,
rectangle.north - step * i
)
}
// 弧度转换为经纬度
var tmpLonLat = this.rectangle2LonLat(tmp)
// 计算交点
var tmpJdarr = []
polyLines.map(res => {
var mb = null
if (bool) {
mb = turf.lineString([
[tmpLonLat[1][0], tmpLonLat[1][1]],
[tmpLonLat[3][0], tmpLonLat[3][1]]
])
} else {
mb = turf.lineString([
[tmpLonLat[1][0], tmpLonLat[1][1]],
[tmpLonLat[0][0], tmpLonLat[0][1]]
])
}
var intersects = turf.lineIntersect(turf.lineString(res[0]), mb)
if (intersects.features.length > 0) {
var tmplatlon = intersects.features[0].geometry.coordinates
tmpJdarr.push(tmplatlon)
}
})
// 就近往返
if (i > 0) {
var distance1 = turf.distance(
turf.point(tmpJdarr[0]),
turf.point(jdArrs[jdArrs.length - 1]),
{ units: 'kilometers' }
)
var distance2 = turf.distance(
turf.point(tmpJdarr[1]),
turf.point(jdArrs[jdArrs.length - 1]),
{ units: 'kilometers' }
)
// console.log(i, distance1, distance2)
if (distance1 > distance2) {
tmpJdarr = tmpJdarr.reverse()
}
}
// 存储交点
tmpJdarr.map(res => {
jdArrs.push(res)
})
}
if (jdArrs[0][0] === jdArrs[1][0] && jdArrs[0][1] === jdArrs[1][1]) {
jdArrs.shift()
}
// 线数据
var linesArrs = []
// 标字
jdArrs.map((res, index) => {
viewer.entities.add({
name: 'uav-tmp-point',
position: Cesium.Cartesian3.fromDegrees(res[0], res[1]),
label: {
text: index + '',
font: '14pt SongTi',
eyeOffset: new Cesium.Cartesian3(0, 0, -100)
}
})
// 存储线数据
linesArrs.push(res[0])
linesArrs.push(res[1])
})
// 画方向线
viewer.entities.add({
name: 'uav-tmp-line',
// corridor polyline
polyline: {
positions: Cesium.Cartesian3.fromDegreesArray(linesArrs),
material: new Cesium.PolylineArrowMaterialProperty(Cesium.Color.RED),
followSurface: true,
width: 10
}
})
},
// 弧度转换为经纬度
rectangle2LonLat(coor) {
const northwest = Cesium.Rectangle.northwest(coor)
const southwest = Cesium.Rectangle.southwest(coor)
const northeast = Cesium.Rectangle.northeast(coor)
const southeast = Cesium.Rectangle.southeast(coor)
const leftTop = [
Cesium.Math.toDegrees(northwest.longitude),
Cesium.Math.toDegrees(northwest.latitude)
]
const leftBottom = [
Cesium.Math.toDegrees(southwest.longitude),
Cesium.Math.toDegrees(southwest.latitude)
]
const rightTop = [
Cesium.Math.toDegrees(northeast.longitude),
Cesium.Math.toDegrees(northeast.latitude)
]
const rightBottom = [
Cesium.Math.toDegrees(southeast.longitude),
Cesium.Math.toDegrees(southeast.latitude)
]
return [leftTop, rightTop, leftBottom, rightBottom]
},
// 清理entity
cleanEntity() {
var viewer = window.viewer
this.cesium.removeEntityLikeName(viewer, 'uav-')
this.cesium.cleanEntityCollection(viewer, 'uva')
polyArr = []
viewer.trackedEntity = undefined
this.isFly = false
},
// 更改航飞间距触发事件
distanceHandleChange(val) {
this.beginCalc()
// 重置飞行
if (this.isFly) {
this.moniFly()
}
},
// 模拟飞行
moniFly() {
var viewer = window.viewer
var that = this
that.isFly = true
if (polyArr.length === 0) {
this.$message.warning('未检测到航飞区域')
return
}
// 清除上一个动画
this.cesium.cleanEntityCollection(viewer, 'uva')
this.cesium.removeEntityLikeName(viewer, 'uav-tmp-fly')
viewer.trackedEntity = undefined
// 加载新动画
const czml = [
{
id: 'document',
name: 'uva',
version: '1.0',
clock: {
interval: '2022-08-04T10:00:00Z/2022-08-04T15:00:00Z',
currentTime: '2022-08-04T10:00:00Z',
range: 'LOOP_STOP',
multiplier: 10
}
},
{
id: 'path',
name: 'uva-tmp-fly',
description: '<p> 飞行器</p>',
availability: '2022-08-04T10:00:00Z/2022-08-04T15:00:00Z',
path: {
material: {
polylineOutline: {
color: {
rgba: [255, 215, 0, 255]
},
outlineColor: {
rgba: [192, 192, 192, 255]
},
outlineWidth: 5
}
},
width: 8,
leadTime: 10,
// trailTime: 1000,
resolution: 5
},
billboard: {
image:
'data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAACgAAAAfCAYAAACVgY94AAAACXBIWXMAAC4jAAAuIwF4pT92AAAKT2lDQ1BQaG90b3Nob3AgSUNDIHByb2ZpbGUAAHjanVNnVFPpFj333vRCS4iAlEtvUhUIIFJCi4AUkSYqIQkQSoghodkVUcERRUUEG8igiAOOjoCMFVEsDIoK2AfkIaKOg6OIisr74Xuja9a89+bN/rXXPues852zzwfACAyWSDNRNYAMqUIeEeCDx8TG4eQuQIEKJHAAEAizZCFz/SMBAPh+PDwrIsAHvgABeNMLCADATZvAMByH/w/qQplcAYCEAcB0kThLCIAUAEB6jkKmAEBGAYCdmCZTAKAEAGDLY2LjAFAtAGAnf+bTAICd+Jl7AQBblCEVAaCRACATZYhEAGg7AKzPVopFAFgwABRmS8Q5ANgtADBJV2ZIALC3AMDOEAuyAAgMADBRiIUpAAR7AGDIIyN4AISZABRG8lc88SuuEOcqAAB4mbI8uSQ5RYFbCC1xB1dXLh4ozkkXKxQ2YQJhmkAuwnmZGTKBNA/g88wAAKCRFRHgg/P9eM4Ors7ONo62Dl8t6r8G/yJiYuP+5c+rcEAAAOF0ftH+LC+zGoA7BoBt/qIl7gRoXgugdfeLZrIPQLUAoOnaV/Nw+H48PEWhkLnZ2eXk5NhKxEJbYcpXff5nwl/AV/1s+X48/Pf14L7iJIEyXYFHBPjgwsz0TKUcz5IJhGLc5o9H/LcL//wd0yLESWK5WCoU41EScY5EmozzMqUiiUKSKcUl0v9k4t8s+wM+3zUAsGo+AXuRLahdYwP2SycQWHTA4vcAAPK7b8HUKAgDgGiD4c93/+8//UegJQCAZkmScQAAXkQkLlTKsz/HCAAARKCBKrBBG/TBGCzABhzBBdzBC/xgNoRCJMTCQhBCCmSAHHJgKayCQiiGzbAdKmAv1EAdNMBRaIaTcA4uwlW4Dj1wD/phCJ7BKLyBCQRByAgTYSHaiAFiilgjjggXmYX4IcFIBBKLJCDJiBRRIkuRNUgxUopUIFVIHfI9cgI5h1xGupE7yAAygvyGvEcxlIGyUT3UDLVDuag3GoRGogvQZHQxmo8WoJvQcrQaPYw2oefQq2gP2o8+Q8cwwOgYBzPEbDAuxsNCsTgsCZNjy7EirAyrxhqwVqwDu4n1Y8+xdwQSgUXACTYEd0IgYR5BSFhMWE7YSKggHCQ0EdoJNwkDhFHCJyKTqEu0JroR+cQYYjIxh1hILCPWEo8TLxB7iEPENyQSiUMyJ7mQAkmxpFTSEtJG0m5SI+ksqZs0SBojk8naZGuyBzmULCAryIXkneTD5DPkG+Qh8lsKnWJAcaT4U+IoUspqShnlEOU05QZlmDJBVaOaUt2ooVQRNY9aQq2htlKvUYeoEzR1mjnNgxZJS6WtopXTGmgXaPdpr+h0uhHdlR5Ol9BX0svpR+iX6AP0dwwNhhWDx4hnKBmbGAcYZxl3GK+YTKYZ04sZx1QwNzHrmOeZD5lvVVgqtip8FZHKCpVKlSaVGyovVKmqpqreqgtV81XLVI+pXlN9rkZVM1PjqQnUlqtVqp1Q61MbU2epO6iHqmeob1Q/pH5Z/YkGWcNMw09DpFGgsV/jvMYgC2MZs3gsIWsNq4Z1gTXEJrHN2Xx2KruY/R27iz2qqaE5QzNKM1ezUvOUZj8H45hx+Jx0TgnnKKeX836K3hTvKeIpG6Y0TLkxZVxrqpaXllirSKtRq0frvTau7aedpr1Fu1n7gQ5Bx0onXCdHZ4/OBZ3nU9lT3acKpxZNPTr1ri6qa6UbobtEd79up+6Ynr5egJ5Mb6feeb3n+hx9L/1U/W36p/VHDFgGswwkBtsMzhg8xTVxbzwdL8fb8VFDXcNAQ6VhlWGX4YSRudE8o9VGjUYPjGnGXOMk423GbcajJgYmISZLTepN7ppSTbmmKaY7TDtMx83MzaLN1pk1mz0x1zLnm+eb15vft2BaeFostqi2uGVJsuRaplnutrxuhVo5WaVYVVpds0atna0l1rutu6cRp7lOk06rntZnw7Dxtsm2qbcZsOXYBtuutm22fWFnYhdnt8Wuw+6TvZN9un2N/T0HDYfZDqsdWh1+c7RyFDpWOt6azpzuP33F9JbpL2dYzxDP2DPjthPLKcRpnVOb00dnF2e5c4PziIuJS4LLLpc+Lpsbxt3IveRKdPVxXeF60vWdm7Obwu2o26/uNu5p7ofcn8w0nymeWTNz0MPIQ+BR5dE/C5+VMGvfrH5PQ0+BZ7XnIy9jL5FXrdewt6V3qvdh7xc+9j5yn+M+4zw33jLeWV/MN8C3yLfLT8Nvnl+F30N/I/9k/3r/0QCngCUBZwOJgUGBWwL7+Hp8Ib+OPzrbZfay2e1BjKC5QRVBj4KtguXBrSFoyOyQrSH355jOkc5pDoVQfujW0Adh5mGLw34MJ4WHhVeGP45wiFga0TGXNXfR3ENz30T6RJZE3ptnMU85ry1KNSo+qi5qPNo3ujS6P8YuZlnM1VidWElsSxw5LiquNm5svt/87fOH4p3iC+N7F5gvyF1weaHOwvSFpxapLhIsOpZATIhOOJTwQRAqqBaMJfITdyWOCnnCHcJnIi/RNtGI2ENcKh5O8kgqTXqS7JG8NXkkxTOlLOW5hCepkLxMDUzdmzqeFpp2IG0yPTq9MYOSkZBxQqohTZO2Z+pn5mZ2y6xlhbL+xW6Lty8elQfJa7OQrAVZLQq2QqboVFoo1yoHsmdlV2a/zYnKOZarnivN7cyzytuQN5zvn//tEsIS4ZK2pYZLVy0dWOa9rGo5sjxxedsK4xUFK4ZWBqw8uIq2Km3VT6vtV5eufr0mek1rgV7ByoLBtQFr6wtVCuWFfevc1+1dT1gvWd+1YfqGnRs+FYmKrhTbF5cVf9go3HjlG4dvyr+Z3JS0qavEuWTPZtJm6ebeLZ5bDpaql+aXDm4N2dq0Dd9WtO319kXbL5fNKNu7g7ZDuaO/PLi8ZafJzs07P1SkVPRU+lQ27tLdtWHX+G7R7ht7vPY07NXbW7z3/T7JvttVAVVN1WbVZftJ+7P3P66Jqun4lvttXa1ObXHtxwPSA/0HIw6217nU1R3SPVRSj9Yr60cOxx++/p3vdy0NNg1VjZzG4iNwRHnk6fcJ3/ceDTradox7rOEH0x92HWcdL2pCmvKaRptTmvtbYlu6T8w+0dbq3nr8R9sfD5w0PFl5SvNUyWna6YLTk2fyz4ydlZ19fi753GDborZ752PO32oPb++6EHTh0kX/i+c7vDvOXPK4dPKy2+UTV7hXmq86X23qdOo8/pPTT8e7nLuarrlca7nuer21e2b36RueN87d9L158Rb/1tWeOT3dvfN6b/fF9/XfFt1+cif9zsu72Xcn7q28T7xf9EDtQdlD3YfVP1v+3Njv3H9qwHeg89HcR/cGhYPP/pH1jw9DBY+Zj8uGDYbrnjg+OTniP3L96fynQ89kzyaeF/6i/suuFxYvfvjV69fO0ZjRoZfyl5O/bXyl/erA6xmv28bCxh6+yXgzMV70VvvtwXfcdx3vo98PT+R8IH8o/2j5sfVT0Kf7kxmTk/8EA5jz/GMzLdsAAAAgY0hSTQAAeiUAAICDAAD5/wAAgOkAAHUwAADqYAAAOpgAABdvkl/FRgAAA7VJREFUeNrEl2uIlWUQx39nXUu0m2uQbZYrbabdLKMs/VBkmHQjioqFIhBS+hKEQpQRgVAf2u5RQkGBRUllRH4I2e5ZUBJlEZVt5i0tTfHStrZ6fn35L70d9n7Obg88vOedmWfmf2bmmZkXlRrtq9V16mZ1iVqqhd5agXvQf1c5zw/V8dXqrqO6dQKwBrgdWApsCb0VqAc2AnOrMVANwIsD4BLgTOBPYB2wHJgEzAG+ANqAu4ZsZYiuX5QwfqI2hvaNulA9J7zLQn8o76vUuuHOwXHqSzH4aIF+TWjnBkSH+nCBf716SP1KPWO4AJ6ltgfIjRW8p9U/1KPz/ry6RT2mIDNF3Zjz19Ya4G1R/J16dgWvQd2pPlXhMdVZPUTgxfCW1wJgXUJpQlvfg8zs8K8r0Caom9QHetG7NGfa1ElDBThRXRtFd/Qh16puKIS3e7+clBjdy7kL1b3q4fzJQQGck5z6Nb97kxujblWf64HXov7Vl/E4YXWccP9AAd6dAx+ox/WTArNzY1t64B0f8K0DyLXuUvRGZfcpCo1VX4tg6wB76WMB0dALf526foAX8cqUot2pGP8B2Kz+krBeNYjS8636dh/8Beo2deoA9TWp76pd6g0q9cDNwKvAD8A84EfglLRBe2g+JWAfcEF68bPABOCoAl/gIPA5MA64FVgGnNhP292W3r0SeB1YVlJXAjcBP8XwyQUj9AKwAzg2+/fQSsBhoJxBAaALaIzenZGnD911wA7gEDAD2FFSpwOzgDHZ5T7+ZSlGd2d6AXgi5+qAn+O5U0PbBVwKtAD3AHuB8f3YGBUdncCGoQ4LE9XtGRqK9LnduVPRIu2BPqwD65IYbS7Qpql7Ql9YoJcy9bwzkgPrfOCj5G33+h54E/g0PAr5thq4ApgyEgNrc27aWwVaPTA1QJ4BjgTGFvhteV40EgPrgvTP7qlmZqFnl9WD+b2posN83E/NrEkOjlI/U1fkfUYa/pe5IE3qZPW8jFOqiyN7p3pAPX04c7AxYSoDDcAjKT2LgLXA6IR2M3Bviv59wDTgQGTPH84Qd8+HXfHcoUws2zM0HMjuUPep+xP2PWpnwtw0GJsldbBpewQwE/gbeDyt7H1gcW53O7AC+A3Yn6+/W+Ld9SnWA15DAVhc8xK2TuA9YHrCuhV4EngFuBx4YagG6qv8cF+T52kB2Zy+e1I8taUacNV+uBdXO7ABmJwJpwx8XQvF9TUCWM64tiQhbq/oMv+7BwFWpQzNT8vbVQul/wwAGzzdmXU1xuUAAAAASUVORK5CYII=',
scale: 1.5,
eyeOffset: {
cartesian: [0.0, 0.0, -10.0]
}
},
position: {
epoch: '2022-08-04T10:00:00Z',
cartographicDegrees: []
}
}
]
var tmp = []
var timesArr = []
var timeTmp = 0
var height = 500 // 飞行高度
var v = 20 // 飞行速度
var yc = 2 // 重复飞行延迟时间 秒
// 手动插值
timesArr.push(0)
tmp.push(0)
tmp.push(jdArrs[0][0])
tmp.push(jdArrs[0][1])
tmp.push(height + Math.random() * 5 + 5)
for (var i = 0; i < jdArrs.length; i++) {
var times = 0
if (i < jdArrs.length - 1) {
var from = turf.point(jdArrs[i])
var to = turf.point(jdArrs[i + 1])
var options = { units: 'kilometers' }
var distance = turf.distance(from, to, options)
times = Math.round((distance * 1000) / v)
timeTmp += times
timesArr.push(timeTmp)
tmp.push(timeTmp)
tmp.push(jdArrs[i + 1][0])
tmp.push(jdArrs[i + 1][1])
tmp.push(height + Math.random() * 5 + 5)
}
}
// 动态配置CZML
// 动画结束时间
var tmpsss = new Date(
new Date(czml[0].clock.currentTime).getTime() +
(timesArr[timesArr.length - 1] + yc) * 1000
).toISOString()
var str = czml[0].clock.currentTime + '/' + tmpsss
czml[0].clock.interval = str
czml[1].availability = str
czml[1].path.trailTime = timesArr[2]
czml[1].position.cartographicDegrees = tmp
// 加载CZML
var dataSource = viewer.dataSources.add(Cesium.CzmlDataSource.load(czml))
// 加载同步扫描椎体
dataSource
.then(function(dataSource) {
var entity = dataSource.entities.getById('path')
entity.viewFrom = new Cesium.Cartesian3(0.0, -1000.0, 1500.0)
viewer.trackedEntity = entity
var cylinderEntitys = that.addFrustum({
length: 510.0,
topRadius: 0.0,
bottomRadius: that.hfDistance / 2,
color: Cesium.Color.GREEN.withAlpha(0.5)
})
var property = new Cesium.SampledPositionProperty()
for (var ind = 0; ind < timesArr.length; ind++) {
var time = Cesium.JulianDate.addSeconds(
viewer.clock.currentTime,
timesArr[ind],
new Cesium.JulianDate()
)
var position = entity.position.getValue(time)
if (position) {
var cartographic = Cesium.Ellipsoid.WGS84.cartesianToCartographic(
position
)
var lat = Cesium.Math.toDegrees(cartographic.latitude)
var lng = Cesium.Math.toDegrees(cartographic.longitude)
var hei = cartographic.height / 1.9
property.addSample(
time,
Cesium.Cartesian3.fromDegrees(lng, lat, hei)
)
}
}
cylinderEntitys.position = property
})
.catch(function(error) {
window.alert(error)
})
},
// 创建视锥体
addFrustum(option) {
var viewer = window.viewer
return viewer.entities.add({
name: 'uav-tmp-fly-wxsimple',
position: Cesium.Cartesian3.fromDegrees(114.0, 36.0, 200000.0),
cylinder: {
slices: option.slices,
length: option.length,
topRadius: option.topRadius,
bottomRadius: option.bottomRadius,
material: option.color
}
})
}
}
}
</script>
<style lang="scss" scoped>
.show {
display: block;
}
.uvaRoutePlanBox {
width: 100vw;
height: 100vh;
}
/* 可视域 */
#cesiumContainer {
width: 100%;
height: 100%;
}
.body {
position: fixed;
right: calc(100% - 300px);
top: 166px;
z-index: 999;
width: 300px;
text-align: center;
background: rgba(0, 0, 0, 0.6);
padding: 15px;
color: #fff;
}
.form-item {
margin: 5px;
.form-label {
display: inline-block;
width: 100px;
text-align: center;
font-size: 16px;
font-weight: bold;
}
.form-connect {
display: inline-block;
// width: calc(100% - 120px);
}
}
.hide {
display: none;
}
</style>
使用注意
1、cesium引用切换为自己的引用。
2、this.cesium.removeEntityLikeName 和 this.cesium.cleanEntityCollection报错。
/**
* 根据名称删除DataSources
* @param {*} name
*/
export function cleanEntityCollection(viewer, key) {
var tmp = viewer.dataSources.getByName(key)
if (tmp.length > 0) {
tmp.map(res => {
viewer.dataSources.remove(res)
})
}
}
/**
* 根据name获取entity
*
* */
export function getEntityLikeName(viewer, name) {
if (name) {
var entities = viewer.entities.values
var findEntities = []
for (var i = 0; i < entities.length; i++) {
var entity = entities[i]
// console.log(entity);
if (entity.name && entity.name.indexOf(name) !== -1) {
findEntities.push(entity)
}
}
return findEntities
} else {
return []
}
}
/**
* 根据类似name移除entity
*
* */
export function removeEntityLikeName(viewer, name) {
if (name) {
var cleanEntities = getEntityLikeName(viewer, name)
// 清除
cleanEntities.map(res => {
viewer.entities.removeById(res.id)
})
} else {
viewer.entities.removeAll()
}
}3、this.$message 报错可将 this.$message.warning删除或换成alert弹窗或其他提示方法。
追加说明
由于很多人咨询配置环境问题,现配置一份简单的vue的框架。cesium引入采用cdn,npm i 和npm run dev 即可运行。
源码地址:
uav: Cesium 简单航飞线路规划,模拟飞行扫描效果 - Gitee.com
参考文档
数据计算参考:
GET START | Turf.js中文网 (fenxianglu.cn)
飞行效果参考:
相关方法参考:

















 219
219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











