







本文是物理力学中的运动方程的一个笔记,大部分内容来源于朗道理论物理第一卷力学,在原本基础上加了些注释和详细推导,仅供参考。
广义坐标
一个坐标,我们可以简单的用X,Y,Z来表示质点的位置,然后用 X ˙ , Y ˙ , Z ˙ \displaystyle \dot{X} ,\dot{Y},\dot{Z} X˙,Y˙,Z˙分别表示各个维度的速度,即
X ˙ = d X d t \dot{X} =\frac{dX}{dt} X˙=dtdX
但是我们研究运动的时候有时候,坐标的位置的运动很可能是耦合的,比如钟摆运动,而为了处理这一类耦合,我们就不得不做出一些约束,比如类似这样的 x 2 + y 2 = 1 \displaystyle x^{2} +y^{2} =1 x2+y2=1在圆周上运动。显然用转角的角度还有钟摆长度来刻画这个运动的坐标是一种更为方便的方法,且不需要额外的约束。所以为了研究这一类问题,我们可以定义出一种广义坐标,用于刻画位置的任意具有s个自由度的广义坐标 q 1 , . . . , q s \displaystyle q_{1} ,...,q_{s} q1,...,qs,且定义 q ˙ \displaystyle \dot{q} q˙为广义速度。
最小作用量原理
一个力学系统可以用一个确定的函数表征:
L ( q 1 , . . . , q s , q ˙ 1 , . . . , q ˙ s , t ) L( q_{1} ,...,q_{s} ,\dot{q}_{1} ,...,\dot{q}_{s} ,t) L(q1,...,qs,q˙1,...,q˙s,t)
可以看到这个只有位置,速度而不含加速度等等,揭示了一个物理事实,力学状态是完全由坐标和速度决定的。这里L称为拉格朗日函数。
我们会在后文直接推导出L的具体定义,但这里剧透比较重要的几个结论,首先L一般定义为 L = T − U \displaystyle L=T-U L=T−U,其中 T \displaystyle T T称为动能 U \displaystyle U U称为势能。此外,或许有人会疑惑为什么L不需要考虑加速度呢?后文会指出一个事实,考虑一个经典的牛顿定律 m a = F \displaystyle m\mathbf{a} =\mathbf{F} ma=F,力其实是定义为 F = − ∂ U ∂ q \displaystyle \mathbf{F} =-\frac{\partial U}{\partial \mathbf{q}} F=−∂q∂U,他是一个关于坐标的函数(势能只与坐标有关,而且这里是对坐标而不是对时间求导)。因此,加速度的本质也是一个关于坐标的函数。
那么运动系统在两个位置之间的运动的积分
S = ∫ t 1 t 2 L ( q , q ˙ , t ) d t S=\int ^{t_{2}}_{t_{1}} L( q,\dot{q} ,t) dt S=∫t1t2L(q,q˙,t)dt
取最小值(局部极值)。运动积分S一定取到最小值,所以我们能够通过研究最小值成立的条件来反推出运动的轨迹。具体而言,研究这条轨迹我们要用到变分法。直觉上,变分法就是将函数看成是一般的变量来求导求解等等。具体的,设坐标 q ( t ) \displaystyle q( t) q(t),我们可以想象这个q为一条轨迹,那么S取最小的时候,不管如何改变轨迹:
q ( t ) + δ q ( t ) q( t) +\delta q( t) q(t)+δq(t)
S都一定会变大,这里 δ q ( t ) \displaystyle \delta q( t) δq(t)表示序列的改变量,称为q的变分。
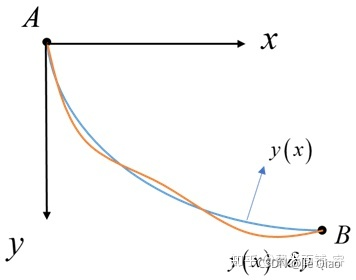
不同的轨迹如图所示,可以发现,起点终点是一样的,所以在起点终点的变化量应该是0,即 δ q ( t 1 ) = δ q ( t 2 ) = 0 \displaystyle \delta q( t_{1}) =\delta q( t_{2}) =0 δq(t1)=δq(t2)=0. 于是S的增量为
∫ t 1 t 2 L ( q + δ q , q ˙ + δ q ˙ , t ) d t − ∫ t 1 t 2 L ( q , q ˙ , t ) d t \int ^{t_{2}}_{t_{1}} L( q+\delta q,\dot{q} +\delta \dot{q} ,t) dt-\int ^{t_{2}}_{t_{1}} L( q,\dot{q} ,t) dt ∫t1t2L(q+δq,q˙+δq˙,t)dt−∫t1t2L(q,q˙,t)dt
我们可以类比下普通函数的差异 Δ g = g ( x + Δ x ) − g ( x ) \displaystyle \Delta g=g( x+\Delta x) -g( x) Δg=g(x+Δx)−g(x)。类比过来,上面的这个增量可以写成
δ S = ∫ t 1 t 2 L ( q + δ q , q ˙ + δ q ˙ , t ) d t − ∫ t 1 t 2 L ( q , q ˙ , t ) d t \delta S=\int ^{t_{2}}_{t_{1}} L( q+\delta q,\dot{q} +\delta \dot{q} ,t) dt-\int ^{t_{2}}_{t_{1}} L( q,\dot{q} ,t) dt δS=∫t1t2L(q+δq,q˙+δq˙,t)dt−∫t1t2L(q,q˙,t)dt
那么类比与函数的极值的必要条件,显然当 d g ( t ) d t = 0 ⟹ d g ( t ) = 0 \displaystyle \frac{dg( t)}{dt} =0\Longrightarrow dg( t) =0 dtdg(t)=0⟹dg(t)=0,于是,当S取得极值时有 δ S = 0 \displaystyle \delta S=0 δS=0
δ S = δ ∫ t 1 t 2 L ( q , q ˙ , t ) d t = 0 \delta S=\delta \int ^{t_{2}}_{t_{1}} L( q,\dot{q} ,t) dt=0 δS=δ∫t1t2L(q,q˙,t)dt=0
我们可以写成另外一种变分形式:
δ S = ∫ t 1 t 2 L ( q + δ q , q ˙ + δ q ˙ , t ) − L ( q , q ˙ , t ) d t = ∫ t 1 t 2 ( ∂ L ∂ q δ q + ∂ L ∂ q ˙ δ q ˙ ) d t \begin{aligned} \delta S & =\int ^{t_{2}}_{t_{1}} L( q+\delta q,\dot{q} +\delta \dot{q} ,t) -L( q,\dot{q} ,t) dt\\ & =\int ^{t_{2}}_{t_{1}} (\frac{\partial L}{\partial q} \delta q+\frac{\partial L}{\partial \dot{q}} \delta \dot{q}) dt \end{aligned} δS=∫t1t2L(q+δq,q˙+δq˙,t)−L(q,q˙,t)dt=∫t1t2(∂q∂Lδq+∂q˙∂Lδq˙)dt
之所以可以写成这个形式,是因为全导数的定义, Δ L = ∂ L ∂ q Δ q + ∂ L ∂ q ˙ Δ q ˙ \displaystyle \Delta L=\frac{\partial L}{\partial q} \Delta q+\frac{\partial L}{\partial \dot{q}} \Delta \dot{q} ΔL=∂q∂LΔq+∂q˙∂LΔq˙。接下来使用分部积分法进一步化简:
∫ t 1 t 2 ∂ L ∂ q ˙ d d t δ q d t = ∫ t 1 t 2 ∂ L ∂ q ˙ d ( δ q ) = ∂ L ∂ q ˙ δ q ∣ t 1 t 2 + ∫ t 1 t 2 δ q d ( ∂ L ∂ q ˙ ) = ∂ L ∂ q ˙ δ q ∣ t 1 t 2 + ∫ t 1 t 2 δ q d d t ( ∂ L ∂ q ˙ ) d t \int ^{t_{2}}_{t_{1}}\frac{\partial L}{\partial \dot{q}}\frac{d}{dt} \delta qdt=\int ^{t_{2}}_{t_{1}}\frac{\partial L}{\partial \dot{q}} d( \delta q) =\frac{\partial L}{\partial \dot{q}} \delta q|^{t_{2}}_{t_{1}} +\int ^{t_{2}}_{t_{1}} \delta qd\left(\frac{\partial L}{\partial \dot{q}}\right) =\frac{\partial L}{\partial \dot{q}} \delta q|^{t_{2}}_{t_{1}} +\int ^{t_{2}}_{t_{1}} \delta q\frac{d}{dt}\left(\frac{\partial L}{\partial \dot{q}}\right) dt ∫t1t2∂q˙∂Ldtdδqdt=∫t1t2∂q˙∂Ld(δq)=∂q˙∂Lδq∣t1t2+∫t1t2δqd(∂q˙∂L)=∂q˙∂Lδq∣t1t2+∫t1t2δqdtd(∂q˙∂L)dt
于是:
δ S = ∫ t 1 t 2 ( ∂ L ∂ q δ q + ∂ L ∂ q ˙ d d t δ q ) d t = ∂ L ∂ q ˙ δ q ∣ t 1 t 2 + ∫ t 1 t 2 ( ∂ L ∂ q − d d t ∂ L ∂ q ˙ ) δ q d t = 0 \begin{aligned} \delta S & =\int ^{t_{2}}_{t_{1}} (\frac{\partial L}{\partial q} \delta q+\frac{\partial L}{\partial \dot{q}}\frac{d}{dt} \delta q) dt\\ & =\frac{\partial L}{\partial \dot{q}} \delta q|^{t_{2}}_{t_{1}} +\int ^{t_{2}}_{t_{1}} (\frac{\partial L}{\partial q} -\frac{d}{dt}\frac{\partial L}{\partial \dot{q}} )\delta qdt=0 \end{aligned} δS=∫t1t2(∂q∂Lδq+∂q˙∂Ldtdδq)dt=∂q˙∂Lδq∣t1t2+∫t1t2(∂q∂L−dtd∂q˙∂L)δqdt=0
首先因为 δ q ( t 1 ) = δ q ( t 2 ) = 0 \displaystyle \delta q( t_{1}) =\delta q( t_{2}) =0 δq(t1)=δq(t2)=0,所以 ∂ L ∂ q ˙ δ q ∣ t 1 t 2 = 0 \displaystyle \frac{\partial L}{\partial \dot{q}} \delta q|^{t_{2}}_{t_{1}} =0 ∂q˙∂Lδq∣t1t2=0,又因为 δ S = 0 \displaystyle \delta S=0 δS=0需要对任意的 δ q \displaystyle \delta q δq成立,于是,只能是被积函数恒等于0,即
∂ L ∂ q − d d t ∂ L ∂ q ˙ = 0 \frac{\partial L}{\partial q} -\frac{d}{dt}\frac{\partial L}{\partial \dot{q}} =0 ∂q∂L−dtd∂q˙∂L=0
这就是拉格朗日方程。
PS: 有人可能会疑惑为什么任意的 δ q \displaystyle \delta q δq 成立只能是被积函数恒等于0而不是整个积分恰好等于0呢。这是因为 δ q \displaystyle \delta q δq 其实是一个关于t的函数,显然函数变了,那么这个关于t的积分也是会变的,所以不可能对任意的函数都成立,所以要等于0恒成立就只能内部为0了。
更一般,对于有s个自由度的系统(所以这里是要求q之间是正交的,因为是s个自由度),
∂ L ∂ q i − d d t ∂ L ∂ q i ˙ = 0 , i = 1 , . . . , s \frac{\partial L}{\partial q_{i}} -\frac{d}{dt}\frac{\partial L}{\partial \dot{q_{i}}} =0,\ \ i=1,...,s ∂qi∂L−dtd∂qi˙∂L=0, i=1,...,s
这个方程完整描述了系统的运动状态,揭示了加速度,速度,坐标之间的联系。我们只需要知道物体的初始状态就能推导出物体的运动规律。观察这个运动方程,L完全可以变成以下形式而不改变运动方程:
L ′ ( q , q ˙ , t ) = L ( q , q ˙ , t ) + d d t f ( q , t ) L'( q,\dot{q} ,t) =L( q,\dot{q} ,t) +\frac{d}{dt} f( q,t) L′(q,q˙,t)=L(q,q˙,t)+dtdf(q,t)
可以验证一遍:
d d t f ( q , t ) = ∑ j = 1 s ∂ f ( q , t ) ∂ q j q ˙ j + ∑ j = 1 s ∂ f ( q , t ) ∂ t \frac{d}{dt} f( q,t) =\sum ^{s}_{j=1}\frac{\partial f( q,t)}{\partial q_{j}}\dot{q}_{j} +\sum ^{s}_{j=1}\frac{\partial f( q,t)}{\partial t} dtdf(q,t)=j=1∑s∂qj∂f(q,t)q˙j+j=1∑s∂t∂f(q,t)
于是,
∂ ∂ q ˙ i [ d d t f ( q , t ) ] = ∂ f ( q , t ) ∂ q i d d t ( ∂ ∂ q ˙ i [ d d t f ( q , t ) ] ) = ∑ j = 1 s ∂ 2 f ( q , t ) ∂ q j ∂ q i q ˙ j + ∂ 2 f ( q , t ) ∂ t ∂ q i ∂ ∂ q i [ d d t f ( q , t ) ] = ∑ j = 1 s ∂ 2 f ( q , t ) ∂ q i ∂ q j q ˙ j + ∂ 2 f ( q , t ) ∂ q i ∂ t d d t ( ∂ ∂ q ˙ i [ d d t f ( q , t ) ] ) − ∂ ∂ q i [ d d t f ( q , t ) ] = 0 \begin{aligned} & \frac{\partial }{\partial \dot{q}_{i}}\left[\frac{\mathrm{d}}{\mathrm{d} t} f(q,t)\right] =\frac{\partial f(q,t)}{\partial q_{i}}\\ & \frac{\mathrm{d}}{\mathrm{d} t}\left(\frac{\partial }{\partial \dot{q}_{i}}\left[\frac{\mathrm{d}}{\mathrm{d} t} f(q,t)\right]\right) =\sum ^{s}_{j=1}\frac{\partial ^{2} f(q,t)}{\partial q_{j} \partial q_{i}}\dot{q}_{j} +\frac{\partial ^{2} f(q,t)}{\partial t\partial q_{i}}\\ & \frac{\partial }{\partial q_{i}}\left[\frac{\mathrm{d}}{\mathrm{d} t} f(q,t)\right] =\sum ^{s}_{j=1}\frac{\partial ^{2} f(q,t)}{\partial q_{i} \partial q_{j}}\dot{q}_{j} +\frac{\partial ^{2} f(q,t)}{\partial q_{i} \partial t}\\ & \frac{\mathrm{d}}{\mathrm{d} t}\left(\frac{\partial }{\partial \dot{q}_{i}}\left[\frac{\mathrm{d}}{\mathrm{d} t} f(q,t)\right]\right) -\frac{\partial }{\partial q_{i}}\left[\frac{\mathrm{d}}{\mathrm{d} t} f(q,t)\right] =0 \end{aligned} ∂q˙i∂[dtdf(q,t)]=∂qi∂f(q,t)dtd(∂q˙i∂[dtdf(q,t)])=j=1∑s∂qj∂qi∂2f(q,t)q˙j+∂t∂qi∂2f(q,t)∂qi∂[dtdf(q,t)]=j=1∑s∂qi∂qj∂2f(q,t)q˙j+∂qi∂t∂2f(q,t)dtd(∂q˙i∂[dtdf(q,t)])−∂qi∂[dtdf(q,t)]=0
伽利略相对性原理
接来下讨论惯性系。惯性系有三个性质:时间平移不变性,空间平移不变性,空间各向同性。什么意思呢?
时间平移不变性就是说我们任意设置时间的度量都不会影响物理定律的形式。
空间平移不变性就是说我们任意平移坐标系原点,都不会影响物理定理形式。
空间各向同性则表示我们任意地选取观察的方向,都不会影响物理定理的形式。
简单来讲其实就是,一个物理定律成立,那么他在哪里都成立,与发生时间,地点还有方向都没什么关系。
那么在惯性系中,单质点系统的拉格朗日函数应当具有惯性系的三个不变性。
时间平移不变性、空间平移不变性,就说明L不能显含q, t不然的话显然L的形式就与时间的度量与坐标系的选取有关了。因此L只能与 q ˙ \displaystyle \dot{q} q˙有关。然后根据空间各项同性,可以知道L也应当与 q ˙ \displaystyle \dot{q} q˙也就是 v \displaystyle \boldsymbol{v} v的方向无关,否则的话旋转一下参考系就会得到L不同的数学形式。因此L只与 ∣ v ∣ \displaystyle |\boldsymbol{v} | ∣v∣有关。我们不妨设 L = L ( v 2 ) \displaystyle L=L\left( v^{2}\right) L=L(v2) (这里仅仅是为了说明L只和v的模长相关,因此用平方可以消去方向的相关性,如果你喜欢也可以直接设 L = L ( ∣ v ∣ ) \displaystyle L=L( |v|) L=L(∣v∣)。代入E-L方程,显然:
d d t ∂ L ∂ v = 0 \frac{\mathrm{d}}{\mathrm{d} t}\frac{\partial L}{\partial v} =0 dtd∂v∂L=0
这是因为v是一个与时间无关的量(根据时间不变性),显然是等于0的,因此v是一个常数。这样我们就推出了牛顿第一定律(惯性定律),质点在不受力的情况下,会做匀速直线运动或者静止。
考虑两个不同的参考系K和K’,其中K相对K’以速度 V \displaystyle V V运动,同一个质点相对这两个参考系的坐标 r \displaystyle r r 和 r ′ \displaystyle r' r′满足关系式
r = r ′ + V t r=r'+Vt r=r′+Vt
例如,考虑质点 r = ( 0 , 0 ) \displaystyle r=( 0,0) r=(0,0),经过10秒,K’以1米每秒的速度往x轴方向走,那么这个点在K仍然 ( 0 , 0 ) \displaystyle ( 0,0) (0,0)但在K’就变成了 ( − 10 , 0 ) \displaystyle ( -10,0) (−10,0),于是, r = − 10 + 10 ∗ 1 = 0 \displaystyle r=-10+10*1=0 r=−10+10∗1=0.,这也被称为伽利略变换。
自由质点的拉格朗日函数
现在研究L的形式,考虑K相对K’以无穷小速度相对运动,那么有 v ′ = v + ϵ \displaystyle \boldsymbol{v} '=\boldsymbol{v} +\mathbf{\epsilon } v′=v+ϵ。因为速度差异极小,所以理论上,这两个坐标系的运动方程是没有差异的,因此L最多相差一个关于时间的全导数。于是这两个L的联系为:
L ′ = L ( v ′ 2 ) = L ( v 2 + 2 v ⋅ ϵ + ϵ 2 ) L'=L\left( v^{\prime 2}\right) =L\left( v^{2} +2\mathbf{v\cdot \epsilon } +\epsilon ^{2}\right) L′=L(v′2)=L(v2+2v⋅ϵ+ϵ2)
注意因为中间的 v ⋅ ϵ \displaystyle \mathbf{v\cdot \epsilon } v⋅ϵ因为不是平方项,所以他们是有方向以及时间的。对 ϵ = 0 \displaystyle \epsilon =0 ϵ=0处做泰勒展开,有
L ( v 2 + 2 v ϵ + ϵ 2 ) = L ( v 2 ) + ∂ L ∂ v 2 ( 2 v ϵ + ϵ 2 ) + . . L\left( v^{2} +2v\epsilon +\epsilon ^{2}\right) =L\left( v^{2}\right) +\frac{\partial L}{\partial v^{2}}\left( 2v\epsilon +\epsilon ^{2}\right) +.. L(v2+2vϵ+ϵ2)=L(v2)+∂v2∂L(2vϵ+ϵ2)+..
忽略掉二次项,我们有
L ( v 2 + 2 v ϵ + ϵ 2 ) = L ( v 2 ) + 2 ∂ L ∂ v 2 v ⋅ ϵ L\left( v^{2} +2v\epsilon +\epsilon ^{2}\right) =L\left( v^{2}\right) +2\frac{\partial L}{\partial v^{2}}\mathbf{v\cdot \epsilon } L(v2+2vϵ+ϵ2)=L(v2)+2∂v2∂Lv⋅ϵ
前面讲过,两个L如果有差异,那么只能是相差某个关于时间和坐标的全导数, d d t f ( q , t ) \displaystyle \frac{d}{dt} f( q,t) dtdf(q,t),这意味着这里只能出现 v \displaystyle \boldsymbol{v} v,于是 L \displaystyle L L必然不能包含 v \displaystyle \boldsymbol{v} v在里面(比如 v 3 = v 2 ∗ v \displaystyle \boldsymbol{v}^{3} =v^{2} *\boldsymbol{v} v3=v2∗v也是不行的),否则求偏导之后会出现 v \displaystyle \boldsymbol{v} v(因为是对 v 2 \displaystyle v^{2} v2求偏导而不是对 v \displaystyle \boldsymbol{v} v,所以 v \displaystyle \boldsymbol{v} v不会被消去的),如果出现 v \displaystyle \boldsymbol{v} v就会跟后面的 v ⋅ ϵ \displaystyle \mathbf{v\cdot \epsilon } v⋅ϵ项结合变成 v 2 \displaystyle v^{2} v2,那么 v \displaystyle \boldsymbol{v} v就消失了,这也不是一个关于时间的微分了。在这种情况下,L与速度的平方成正比:
L = m 2 v 2 L=\frac{m}{2} v^{2} L=2mv2
其中m为常数。此外,对于没有相互作用的质点还可以叠加:
L = ∑ a m a 2 v a 2 L=\sum _{a}\frac{m_{a}}{2} v^{2}_{a} L=a∑2mava2
质点系的拉格朗日函数
上只研究了一个或多个独立质点的情况,现在进一步允许质点之间有相互作用,但不受外部任何物体的作用,称为封闭质点系. 为了描述质点之间的相互作用,可以在自由质点系的拉格朗日函数中增加一个关于坐标的函数,记为 − U \displaystyle -U −U:
L = ∑ a m a 2 v a 2 − U ( r 1 , r 2 , . . . ) L=\sum _{a}\frac{m_{a}}{2} v^{2}_{a} -U(\boldsymbol{r}_{1} ,\boldsymbol{r}_{2} ,...) L=a∑2mava2−U(r1,r2,...)
其中 r a \displaystyle \boldsymbol{r}_{a} ra表示第a个质点的矢量坐标。 U \displaystyle U U称为势能, T = ∑ a m a 2 v a 2 \displaystyle T=\sum _{a}\frac{m_{a}}{2} v^{2}_{a} T=a∑2mava2定义为动能。你会发现,势能只依赖于所在的位置,这意味着其中任何质点位置的改变立刻影响到所有其它质点,可以说相互作用瞬间传递.考虑运动方程:
d d t ∂ L ∂ v a = ∂ L ∂ r a \frac{\mathrm{d}}{\mathrm{d} t}\frac{\partial L}{\partial \boldsymbol{v}_{a}} =\frac{\partial L}{\partial \boldsymbol{r}_{a}} dtd∂va∂L=∂ra∂L
把L代进去,我们有
m a d v a d t = − ∂ U ∂ r a m_{a}\frac{\mathrm{d}\boldsymbol{v}_{a}}{\mathrm{d} t} =-\frac{\partial U}{\partial \boldsymbol{r}_{a}} madtdva=−∂ra∂U
显然,这个就是牛顿方程:
m a a = F a m_{a}\mathbf{a} =\mathbf{F}_{a} maa=Fa
其中, F a = − ∂ U ∂ r a \displaystyle \mathbf{F}_{a} =-\frac{\partial U}{\partial \boldsymbol{r}_{a}} Fa=−∂ra∂U定义为作用在第a个质点上的力,显然这个力只依赖于坐标而不依赖于速度,这意味着,加速度也只是关于坐标的一个函数。
非惯性参考系中的运动
到现在为止,我们总是在惯性参考系研究力学系统的运动。接下来我们研究非惯性参考系下的运动,这意味着我们研究的参考系有可能正在“运动”,不妨设我们要研究的参考系为 K ′ \displaystyle K' K′,正相对与惯性参考系 K 0 \displaystyle K_{0} K0以速度 V ( t ) \displaystyle \mathbf{V}( t) V(t)进行运动。于是它们速度的关系为:
v 0 = v ′ + V ( t ) \boldsymbol{v}_{0} =\boldsymbol{v} '+\mathbf{V}( t) v0=v′+V(t)
回忆下,惯性参考系中的拉格朗日方程为:
L = m 2 v 0 2 − U L=\frac{m}{2}\boldsymbol{v}^{2}_{0} -U L=2mv02−U
我们将这个速度代进去,得到
L = m 2 ( v ′ + V ( t ) ) 2 − U = m 2 v ′ 2 + m v ′ V ( t ) + m 2 V 2 ( t ) − U L=\frac{m}{2}(\boldsymbol{v} '+\mathbf{V}( t))^{2} -U=\frac{m}{2}\boldsymbol{v} ^{\prime 2} +m\boldsymbol{v} '\mathbf{V}( t) +\frac{m}{2}\mathbf{V}^{2}( t) -U L=2m(v′+V(t))2−U=2mv′2+mv′V(t)+2mV2(t)−U
首先,对于 m 2 V 2 ( t ) \displaystyle \frac{m}{2}\mathbf{V}^{2}( t) 2mV2(t)这一项,它是关于时间的函数,完全可以表达为某个函数对时间的全导数,所以可以忽略他。又因为
m v ′ V ( t ) = m V d r ′ d t = d d t ( m V r ′ ) − m r ′ d V d t m\boldsymbol{v} '\mathbf{V}( t) =m\mathbf{V}\frac{d\boldsymbol{r} '}{dt} =\frac{d}{dt}( m\mathbf{Vr} ') -m\boldsymbol{r} '\frac{d\mathbf{V}}{dt} mv′V(t)=mVdtdr′=dtd(mVr′)−mr′dtdV
其中 v ′ = d r ′ / d t \displaystyle \boldsymbol{v} '=d\boldsymbol{r} '/dt v′=dr′/dt, r ′ \displaystyle \boldsymbol{r} ' r′是质点在参考系K‘中的坐标. 所以消去所有全导数,可以得到:
L = m 2 v ′ 2 − m r ′ W ( t ) − U L=\frac{m}{2}\boldsymbol{v} ^{\prime 2} -m\boldsymbol{r} '\mathbf{W}( t) -U L=2mv′2−mr′W(t)−U
其中 W ( t ) = d V d t \displaystyle \mathbf{W}( t) =\frac{d\mathbf{V}}{dt} W(t)=dtdV是参考系的平动加速度。于是考虑运动方程
d d t ∂ L ∂ v ′ = ∂ L ∂ r ′ \frac{\mathrm{d}}{\mathrm{d} t}\frac{\partial L}{\partial \boldsymbol{v} '} =\frac{\partial L}{\partial \boldsymbol{r} '} dtd∂v′∂L=∂r′∂L
我们将这个新的L代进去得到:
m d v ′ d t = − m W ( t ) − d U d t m\frac{\mathrm{d}\boldsymbol{v} '}{\mathrm{d} t} =-m\mathbf{W}( t) -\frac{dU}{dt} mdtdv′=−mW(t)−dtdU
可以发现,对于一个运动的参考系,他本质上就是被额外施加了一个力 m W ( t ) \displaystyle m\mathbf{W}( t) mW(t),且与加速度的方向相反。所以你会发现,在非惯性系中,L的组成不仅存在坐标,速度,还额外多了一个加速度!
下面可以考虑更复杂的参考系K,与K’有共同的原点,但以角速度相对 Ω ( t ) \displaystyle \mathbf{\Omega }( t) Ω(t)相对与K’运动,也就是说,他又平动,又在转动。类似的,它们速度的关系为:
v ′ = v + Ω × r \boldsymbol{v} '=\boldsymbol{v} +\mathbf{\Omega } \times \boldsymbol{r} v′=v+Ω×r
把他代进拉格朗日方程中有
L = m 2 ( v + Ω × r ) 2 − m r ′ W ( t ) − U = m v 2 2 + m v ⋅ ( Ω × r ) + m 2 ( Ω × r ) 2 − m W ⋅ r − U L=\frac{m}{2}(\boldsymbol{v} +\mathbf{\Omega } \times \boldsymbol{r})^{2} -m\boldsymbol{r} '\mathbf{W}( t) -U=\frac{m\boldsymbol{v}^{2}}{2} +m\boldsymbol{v} \cdot (\mathbf{\Omega } \times \boldsymbol{r} )+\frac{m}{2} (\mathbf{\Omega } \times \boldsymbol{r} )^{2} -m\mathbf{W} \cdot \boldsymbol{r} -U L=2m(v+Ω×r)2−mr′W(t)−U=2mv2+mv⋅(Ω×r)+2m(Ω×r)2−mW⋅r−U
这就是在任意参考系中质点的拉格朗日函数的一般形式。接下来我们可类似的推导出运动方程,考虑全微分:
d L = m v ⋅ d v + m d v ⋅ ( Ω × r ) + m v ⋅ ( Ω × d r ) + m ( Ω × r ) ⋅ ( Ω × d r ) − m W ⋅ d r − ∂ U ∂ r ⋅ d r = m v ⋅ d v + m d v ⋅ ( Ω × r ) + m d r ⋅ ( v × Ω ) + m [ ( Ω × r ) × Ω ] ⋅ d r − m W ⋅ d r − ∂ U ∂ r ⋅ d r \begin{aligned} \mathrm{d} L= & m\boldsymbol{v} \cdot \mathrm{d}\boldsymbol{v} +m\mathrm{d}\boldsymbol{v} \cdot (\boldsymbol{\Omega } \times \boldsymbol{r} )+m\boldsymbol{v} \cdot (\boldsymbol{\Omega } \times \mathrm{d}\boldsymbol{r} )+m(\boldsymbol{\Omega } \times \boldsymbol{r} )\cdot (\boldsymbol{\Omega } \times \mathrm{d}\boldsymbol{r} )\\ & -m\boldsymbol{W} \cdot \mathrm{d}\boldsymbol{r} -\frac{\partial U}{\partial \boldsymbol{r}} \cdot \mathrm{d}\boldsymbol{r}\\ = & m\boldsymbol{v} \cdot \mathrm{d}\boldsymbol{v} +m\mathrm{d}\boldsymbol{v} \cdot (\boldsymbol{\Omega } \times \boldsymbol{r} )\\ & +m\mathrm{d}\boldsymbol{r} \cdot (\boldsymbol{v} \times \boldsymbol{\Omega } )+m[(\boldsymbol{\Omega } \times \boldsymbol{r} )\times \boldsymbol{\Omega } ]\cdot \mathrm{d}\boldsymbol{r} -m\boldsymbol{W} \cdot \mathrm{d}\boldsymbol{r} -\frac{\partial U}{\partial \boldsymbol{r}} \cdot \mathrm{d}\boldsymbol{r} \end{aligned} dL==mv⋅dv+mdv⋅(Ω×r)+mv⋅(Ω×dr)+m(Ω×r)⋅(Ω×dr)−mW⋅dr−∂r∂U⋅drmv⋅dv+mdv⋅(Ω×r)+mdr⋅(v×Ω)+m[(Ω×r)×Ω]⋅dr−mW⋅dr−∂r∂U⋅dr
合并包含 d v \displaystyle d\boldsymbol{v} dv 和 d r \displaystyle d\boldsymbol{r} dr 的项,可得
∂ L ∂ v = m v + m ( Ω × r ) , ∂ L ∂ r = m ( v × Ω ) + m [ ( Ω × r ) × Ω ] − m W − ∂ U ∂ r \frac{\partial L}{\partial \boldsymbol{v}} =m\boldsymbol{v} +m(\boldsymbol{\Omega } \times \boldsymbol{r} ),\ \ \frac{\partial L}{\partial \boldsymbol{r}} =m(\boldsymbol{v} \times \boldsymbol{\Omega } )+m[(\boldsymbol{\Omega } \times \boldsymbol{r} )\times \boldsymbol{\Omega } ]-m\boldsymbol{W} -\frac{\partial U}{\partial \boldsymbol{r}} ∂v∂L=mv+m(Ω×r), ∂r∂L=m(v×Ω)+m[(Ω×r)×Ω]−mW−∂r∂U
因此,最后运动方程为:
m d v d t = − ∂ U ∂ r − m W + m ( r × Ω ˙ ) + 2 m ( v × Ω ) + m [ Ω × ( r × Ω ) ] m\frac{d\boldsymbol{v}}{dt} =-\frac{\partial U}{\partial \boldsymbol{r}} -m\boldsymbol{W} +m(\boldsymbol{r} \times \dot{\boldsymbol{\Omega }} )+2m(\boldsymbol{v} \times \boldsymbol{\Omega } )+m[\boldsymbol{\Omega } \times (\boldsymbol{r} \times \boldsymbol{\Omega } )] mdtdv=−∂r∂U−mW+m(r×Ω˙)+2m(v×Ω)+m[Ω×(r×Ω)]
我们可以发现,转动而产生的力可以划分为3个部分,分别对应着转动的加速度,速度,还有速度的大小。特别的, 2 m ( v × Ω ) \displaystyle 2m(\boldsymbol{v} \times \boldsymbol{\Omega } ) 2m(v×Ω)是科里奥利力, m [ Ω × ( r × Ω ) ] \displaystyle m[\boldsymbol{\Omega } \times (\boldsymbol{r} \times \boldsymbol{\Omega } )] m[Ω×(r×Ω)]是离心力,总是垂直于转动 Ω \displaystyle \boldsymbol{\Omega } Ω的方向,这里离心力的大小是 m ρ Ω 2 \displaystyle m\rho \boldsymbol{\Omega }^{2} mρΩ2, ρ \displaystyle \rho ρ是质点到转动轴的距离。
参考资料
朗道理论物理教程 卷01 力学
鞠国兴-朗道《力学》解读


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









