







RAW数据的Demosaic算法(去马赛克算法)是图像处理中的关键技术,主要用于将图像传感器(如数码相机、手机摄像头)采集的原始马赛克数据恢复为完整的RGB三通道图像。
1. RAW数据的特性
- 马赛克结构:图像传感器(如CMOS/CCD)通常覆盖一层拜耳滤镜阵列(Bayer Filter Array),每个像素仅能捕获红(R)、绿(G)、蓝(B)三原色中的一种,形成“马赛克”式的单通道数据。
- 拜耳滤镜的典型排列:G通道占50%(人眼对绿色敏感度最高),R和B各占25%,如:
G R G R ... R G R G ... G R G B ... ...
- 拜耳滤镜的典型排列:G通道占50%(人眼对绿色敏感度最高),R和B各占25%,如:
- 数据缺失:每个像素仅含一个颜色通道值,另外两个通道的值需要通过相邻像素插值计算得到。
2. Demosaic算法的目标
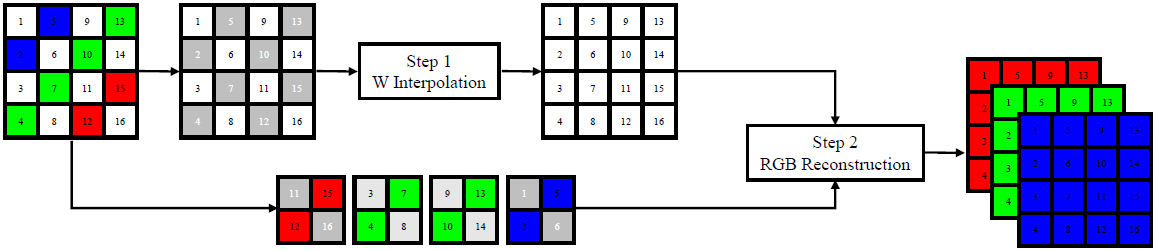
- 恢复完整RGB像素:对每个像素的缺失通道(如R像素缺少G和B值,G像素缺少R或B值),利用周围像素的已知值进行插值,生成全彩图像。
3. 关键挑战与难点
- 伪色(Color Artifacts):插值错误导致颜色失真(如边缘出现红绿/蓝黄条纹),需通过边缘检测避免跨颜色区域错误插值。
- 细节损失:简单插值可能模糊纹理,高级算法需在降噪和细节保留间平衡。
- 计算效率:高分辨率图像(如1亿像素)对算法速度提出要求,硬件(如ISP芯片)需优化并行计算。
4. 应用场景
- 数码相机与手机摄影:RAW文件处理的必经步骤,直接影响最终图像的色彩还原和清晰度。
- 医学成像、遥感:类似马赛克传感器(如荧光显微镜、多光谱相机)的图像恢复。
5. 常用的RAW数据Demosaic算法分类及具体算法
Demosaic的核心是插值(Interpolation),即通过相邻像素的颜色信息估计当前像素的缺失通道。根据算法复杂度和效果,可分为四种:
5.1 传统插值算法(基础线性/非线性插值)
1. 双线性插值(Bilinear Interpolation)
- 提出:基础图像处理算法,广泛用于早期相机。
- 原理:对目标像素的缺失通道,取相邻4个像素的加权平均值(如G像素的R值由上下左右4个R像素平均得到)。
- 特点:计算极快,复杂度低,但边缘易模糊,伪色明显,仅用于低画质或实时预览场景。
2. 双三次插值(Bicubic Interpolation)
- 提出:改进版线性插值,基于三次多项式拟合。
- 原理:考虑更大范围(16邻域)像素,通过加权函数优化插值权重,减少锯齿。
- 特点:画质优于双线性,但计算量较高,仍可能丢失边缘细节。
3. Adams算法(Adams’ Algorithm, 1997)
- 提出:Adams等人针对拜耳阵列设计的早期自适应算法。
- 原理:根据当前像素周围的颜色梯度,选择水平或垂直方向进行插值(如边缘区域沿边缘方向插值)。
- 特点:首次引入边缘导向思想,减少跨边缘模糊,是后续自适应算法的基础。
5.2 自适应边缘/梯度导向算法(提升细节保留)
1. 方向插值(Directional Interpolation, 如Farin算法)
- 原理:检测目标像素周围的边缘方向(水平、垂直、对角线),沿边缘方向进行插值(如沿梯度最小的方向取平均值)。
- 代表:Farin等人(1998)提出的基于边缘方向的插值,避免在边缘处错误跨区域采样。
2. VNG算法(Variable Number of Gradients, 2001)
- 提出:Kang等人提出,基于梯度差异动态选择插值权重。
- 原理:计算目标像素周围水平和垂直方向的梯度,选择梯度较小的方向进行插值,对纹理复杂区域适应性更强。
- 特点:在边缘和纹理区域表现优于双线性,是早期主流算法之一。
3. Hirakawa-Marsett算法(2004)
- 提出:Hirakawa和Marsett针对彩色伪色问题设计。
- 原理:通过颜色差异加权,对相邻像素的贡献度进行调整(如颜色差异大的像素权重降低),减少跨颜色块的错误插值。
- 特点:有效抑制伪色,尤其在高对比度边缘区域表现较好。
4. Malvar算法(2004)
- 提出:Malvar等人结合边缘检测和最小二乘优化。
- 原理:在边缘区域采用方向插值,平滑区域采用全局平均,通过优化目标函数最小化插值误差。
- 特点:被Adobe Camera Raw早期版本采用,平衡了速度和画质。
5.3 基于统计模型的算法(全局优化)
1. 马尔可夫随机场(Markov Random Field, MRF, 2001)
- 原理:将图像建模为MRF,利用像素间的空间相关性(如相邻像素颜色相似性)构建能量函数,通过优化(如吉布斯采样)求解缺失通道。
- 特点:理论上可全局最优,但计算复杂度极高,仅用于学术研究。
2. 贝叶斯方法(Bayesian Demosaicing, 2002)
- 原理:基于贝叶斯定理,假设颜色通道间的统计依赖关系(如R和B在G通道附近的分布),通过后验概率估计缺失值。
- 代表:如Yuan等人的算法,利用自然图像的颜色先验(如RGB相关性)提升插值精度。
5.4 深度学习算法(端到端优化,近年主流)
1. 基于CNN的端到端模型
- 代表:
- DemosaicNet(2017):首个公开的端到端Demosaic网络,使用多层CNN直接学习RAW数据到RGB图像的映射,提升边缘和细节恢复能力。
- U-Net变体:如结合编解码结构和跳跃连接,保留图像高频信息(适用于高分辨率图像)。
- 特点:通过大量真实图像数据训练,能捕捉复杂纹理和颜色依赖,显著减少伪色和模糊,成为手机影像(如华为、谷歌相机)的核心技术。
2. 生成对抗网络(GANs, 2018+)
- 原理:利用GAN的对抗训练机制,生成器学习RAW到RGB的映射,判别器区分真实图像和生成图像,提升色彩还原和细节真实性。
- 代表:如CycleGAN在Demosaic中的应用,或针对低光场景的降噪+Demosaic联合优化模型。
3. 多任务联合模型
- 趋势:结合Demosaic与降噪、超分辨率等任务(如Real-ESRGAN扩展应用),通过联合优化提升整体画质,常见于高端影像处理芯片(如索尼ISP、联发科APU)。
6. 工业界专有算法(相机厂商核心技术)
- 索尼、佳能、尼康等:自研自适应算法,结合硬件特性(如传感器微透镜布局)优化插值策略,兼顾速度和画质(如索尼的“双重降噪”与Demosaic结合)。
- 手机厂商(华为、苹果、三星):深度学习算法为主,针对手机传感器小、噪声大的问题,通过神经网络动态调整插值权重,提升暗光场景色彩准确性。
总结
- 速度优先:双线性插值(实时预览)、VNG(早期手机)。
- 画质优先:深度学习算法(现代旗舰相机/手机)、Malvar算法(专业RAW处理软件)。
- 平衡方案:方向插值、Hirakawa算法(中等计算量,较好抑制伪色)。
Demosaic算法是连接传感器原始数据与全彩图像的桥梁,其核心是通过插值策略智能填充缺失的颜色通道。从简单的双线性插值到复杂的深度学习模型,算法的选择需平衡图像质量、计算效率和硬件适配,是成像系统(如相机、手机)画质优化的核心技术之一。
这些算法共同推动了从入门级相机到高端影像设备的画质提升,其中深度学习算法因强大的拟合能力,成为当前研究和应用的热点。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











