





虽然软机器人抓手外表看起来比较柔软,但它们的内部结构是由很坚硬的电子元件所构成。然而,一种新的、更通用的仿生抓取系统可以将抓手做到100%的柔软。
由中国东南大学科学家团队开发的实验抓取器的灵感来源于像维纳斯捕蝇草这类植物,它们受环境刺激的影响而移动。
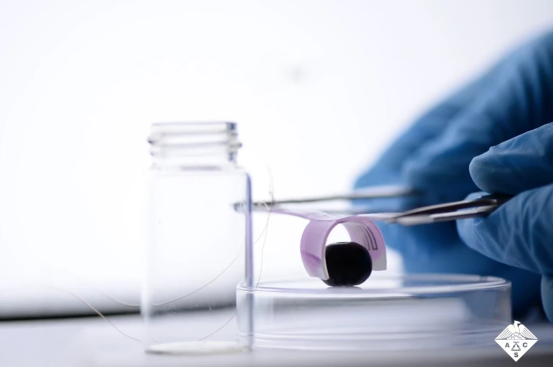
研究人员首先从一种称为液晶弹性体(LCE)的聚合物板开始出发,该平板可以根据温度的变化改变自身形状。然后,他们将液态金属(注入镍的镓铟合金)涂在其表面上,将其磁性排列成线,形成不间断的电路。最后,他们用一层有机硅密封电路。
当电流通过该电路时,材料内会产生少量的热量。随后,对抓手表面施加机械压力会拉伸电路,影响电流从而使材料的温度下降。最终,LCE会向内卷曲。减轻压力可以使其恢复到默认的平整状态。
通过这种方式,科学家们可以将抓取器安装在小物体上,使其卷曲来抓紧小物体。释放初始压力后,当抓紧器松开时,就可以实现抬起、移动、放下等动作。
最近在ACS Applied Materials&Interfaces杂志上发表了有关该研究的论文。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









