







小孔相机模型
在计算机视觉中,最常用的相机模型就是小孔模型(小孔成像模型),它将相机的透镜组简化为一个小孔,光线透过小孔在小孔后方的像面上成像,如下图所示。
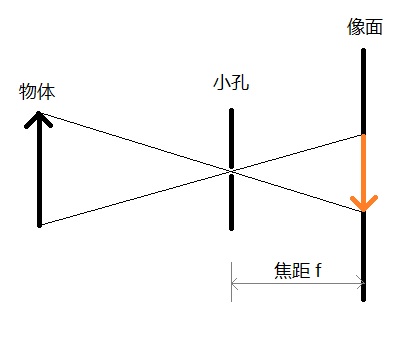
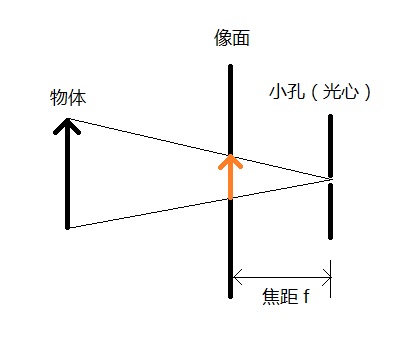
由上图可知,小孔模型成的是倒像,为了表述与研究的方便,我们常常将像面至于小孔之前,且到小孔的距离仍然是焦距f,这样的模型与原来的小孔模型是等价的,只不过成的是正像,符合人的直观感受。在这种情况下,往往将小孔称作光心(Optical Center)。
小孔模型是一种理想相机模型,没有考虑实际相机中存在的场曲、畸变等问题。在实际使用时,这些问题可以通过在标定的过程中引入畸变参数解决,所以小孔模型仍然是目前最广泛使用的相机模型。
坐标系
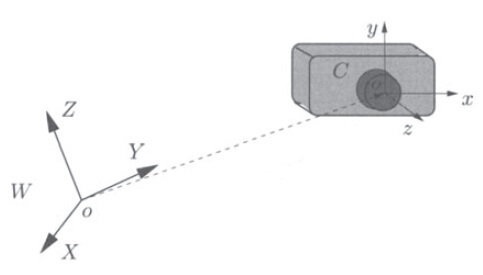
为了用数学研究SfM,我们需要坐标系。在SfM中主要有两类坐标系,一类为相机坐标系,一类为世界坐标系。在本系列中,所以坐标系均为右手坐标系。
相机坐标系以相机的光心(小孔)作为原点,X轴为水平方向,Y轴为竖直方向,Z轴指向相机所观察的方向。
世界坐标系的原点可以任意选择,与相机的具体位置无关。
内参矩阵
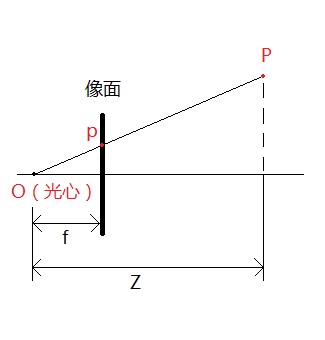
设空间中有一点P,若世界坐标系与相机坐标系重合,则该点在空间中的坐标为(X, Y, Z),其中Z为该点到相机光心的垂直距离。设该点在像面上的像为点p,像素坐标为(x, y),那么(X, Y, Z)和(x, y)有什么关系呢?
但是,图像的像素坐标系原点在左上角,而上面公式假定原点在图像中心,为了处理这一偏移,设光心在图像上对应的像素坐标为 (cx,cy) ,则
将以上关系表示为矩阵形式,有
 其中,将矩阵
其中,将矩阵

称为内参矩阵,因为它只和相机自身的内部参数有关(焦距,光心位置)。
外参矩阵
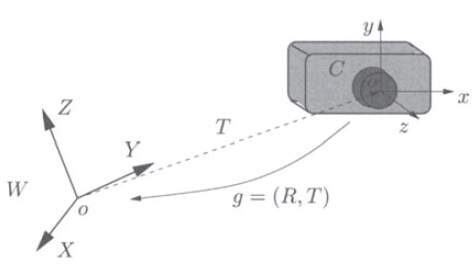
一般情况下,世界坐标系和相机坐标系不重合,这时,世界坐标系中的某一点P要投影到像面上时,先要将该点的坐标转换到相机坐标系下。设P在世界坐标系中的坐标为X,P到光心的垂直距离为s(即上文中的Z),在像面上的坐标为x,世界坐标系与相机坐标系之间的相对旋转为矩阵R(R是一个三行三列的旋转矩阵),相对位移为向量T(三行一列),则
其中 RX+T 即为P在相机坐标系下的坐标,使用齐次坐标改写上式,有
其中 [RT] 是一个三行四列的矩阵,称为外参矩阵,它和相机的参数无关,只与相机在世界坐标系中的位置有关。
相机的标定
相机的标定,即为通过某个已知的目标,求取相机内参矩阵的过程。最常用的标定目标就是棋盘格。用相机对棋盘格从不同角度拍摄多张照片,然后将这些照片导入标定程序或算法,即可自动求出相机的内参。
相机标定:每个摄像机都有唯一的参数,例如,焦点,主点以及透镜的畸变模型。查找摄像机内参数差的过程为摄像机的标定;对基于增强现实的应用来讲,对摄像机标定很重要,因为它将透视变换和透镜的畸变都反映在输出图像上。
为了让用户在增强现实应用中获得更佳的体验,应该用相同的透视投影来增强物体的可视化效果;标定摄像机需要特殊的模式图像,例如:棋盘板或具有白色背景的黑圆圈,被标定的摄像机需要从不同的角度对特殊模式图像拍摄 10-15张照片,然后通过标定算法来找到最优的摄像机内部参数和畸变向量
我们用opencv的例程来进行标定,在你的opencv目录下
sources\samples\cpp\tutorial_code\calib3d\camera_calibration
有3个文件 :
camera_calibration.cpp
VID5.xml
in_VID5.xml
第一个是标定程序的源代码。
第二个是配置文件,你可以更改标定图片获取的方式以及标定板的一些参数。
第三个里面可以修改标定图片序列的文件名。
前提准备:
标定板。这里我制作好了一个,按照原比例打印出来,然后固定在一个硬板子上。
接下来就可以开始了……
我们这里只介绍从摄像头获取标定图片的方式。其他方式可以按照说明更改VID5.xml自行实现。
第一步,新建一个工程,将camera_calibration.cpp文件的源码拷贝进去。
第二步,将VID5.xml拷贝到工程目录下面。
第三步,编辑VID5.xml,将Input标签里的内容改为待标定相机的ID,我的是”1”,记得加上引号。
第四步,编译并运行程序。 “
下面是我的VID5.xml文件
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
标定结果:
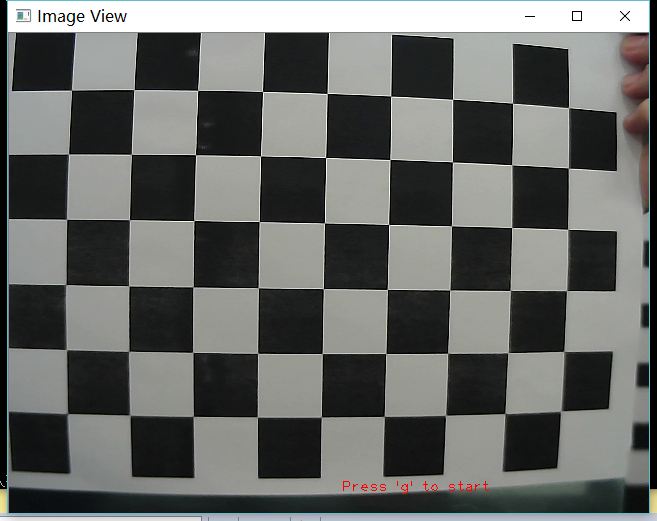
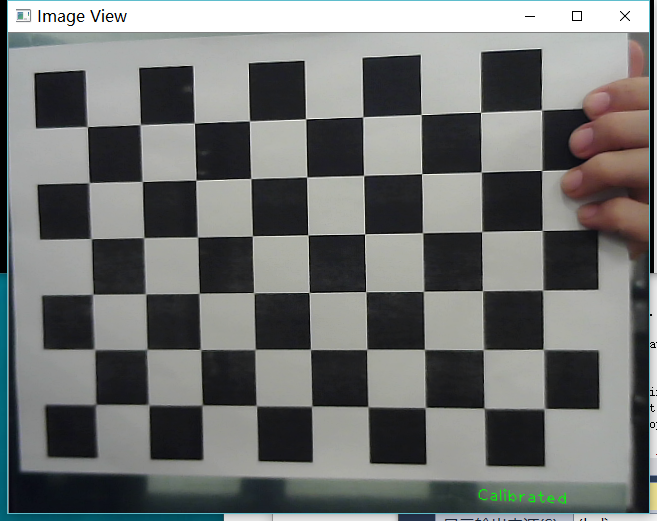
前后的差异可以看清了吧
值得一提的是工程目录下生成了一个out_camera_data.xml文件,里面记录摄像头标定的一些参数,以后可以直接使用。我们用它略去标定的步骤,直接校正摄像机,这样标定好一次就可以一直使用了。
将生成的out_camera_data.xml放到你的工程目录下就可以使用了。
下面是一个简单的调用摄像头并用已有的参数进行标定的程序,可以直接使用。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









