






内核:Linux-3.14.27
![]()
![]()
一、Linux总线设备驱动模型框架
从Linux2.6开始Linux加入了一套驱动管理和注册机制—platform平台总线驱动模型。platform平台总线是一条虚拟总线,platform_device为相应的设备,platform_driver为相应的驱动。与传统的bus/device/driver机制相比,platform由内核统一进行管理,提高了代码的可移植性和安全性。所谓的platform_device并不是与字符设备、块设备和网络设备并列的概念,而是Linux系统提供的一种附加手段。Linux总线设备驱动模型的框架如下图所示:
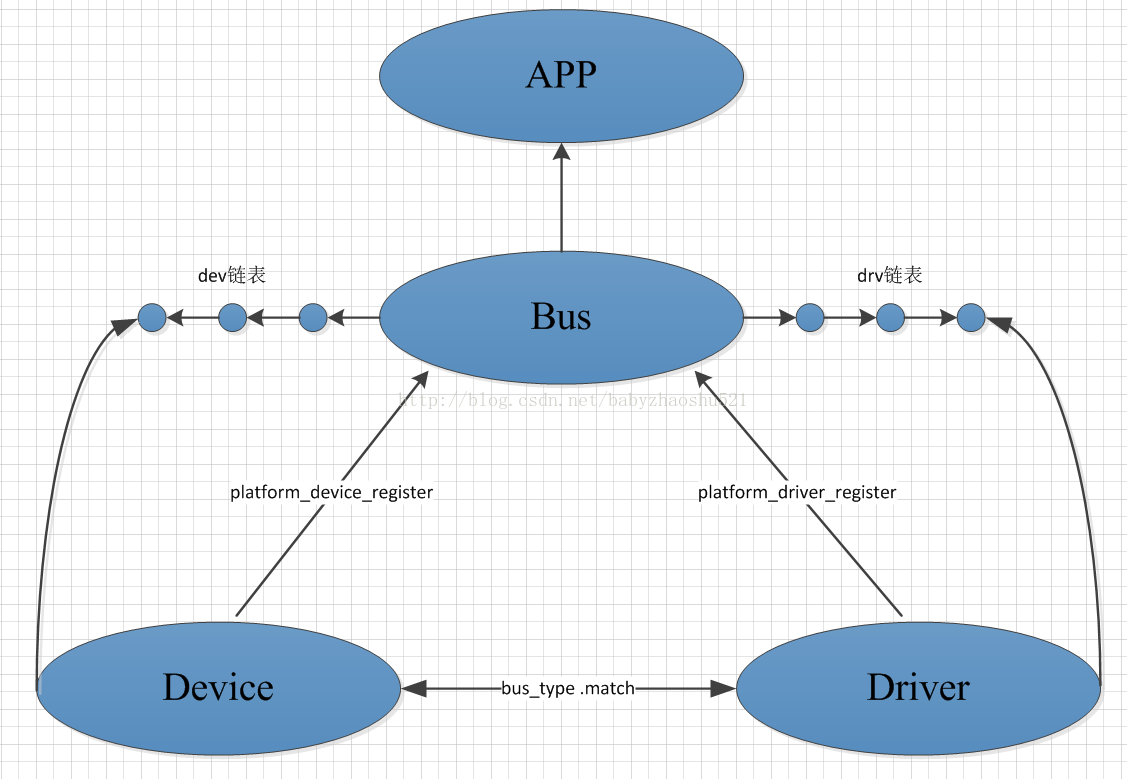
从图中我们可以很清楚的看出Linux平台总线设备驱动模型的整体架构。在总线设备驱动模型中,需关心总线、设备和驱动这3个实体,总线将设备和驱动绑定。当系统向内核注册每一个驱动程序时,都要通过调用platform_driver_register函数将驱动程序注册到总线,并将其放入所属总线的drv链表中,注册驱动的时候会调用所属总线的match函数寻找该总线上与之匹配的每一个设备,如果找到与之匹配的设备则会调用相应的probe函数将相应的设备和驱动进行绑定;同样的当系统向内核注册每一个设备时,都要通过调用platform_device_register函数将设备注册到总线,并将其放入所属总线的dev链表中,注册设备的时候同样也会调用所属总线的match函数寻找该总线上与之匹配的每一个驱动程序,如果找到与之匹配的驱动程序时会调用相应的probe函数将相应的设备和驱动进行绑定;而这一匹配的过程是由总线自动完成的。
接下来我们就以Linux-3.14.27版本的内核,分析一下总线设备驱动模型的执行机制。
二、platform驱动的相关数据结构
1. 结构体驱动对应的结构体platform_driver
struct platform_driver {
int (*probe)(struct platform_device *);
int (*remove)(struct platform_device *);
void (*shutdown)(struct platform_device *);
int (*suspend)(struct platform_device *, pm_message_t state);
int (*resume)(struct platform_device *);
struct device_driver driver;
const struct platform_device_id *id_table;
bool prevent_deferred_probe;
};2. device_driver结构体
struct device_driver {
const char *name; // 驱动的名字
struct bus_type *bus; // 所属总线
struct module *owner;
const char *mod_name; /* used for built-in modules */
bool suppress_bind_attrs; /* disables bind/unbind via sysfs */
const struct of_device_id *of_match_table;
const struct acpi_device_id *acpi_match_table;
int (*probe) (struct device *dev); // 驱动挂载的时候调用
int (*remove) (struct device *dev); // 驱动卸载的时候调用
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
const struct attribute_group **groups;
const struct dev_pm_ops *pm;
struct driver_private *p;
};3. driver_private结构体
struct driver_private {
struct kobject kobj; // 在sysfs中代表目录本身
struct klist klist_devices; // 驱动链表即我们上面所说的drv链表
struct klist_node knode_bus; // 挂载在总线上的驱动链表的节点
struct module_kobject *mkobj; // driver与相关的module之间的联系
struct device_driver *driver;
};
#define to_driver(obj) container_of(obj, struct driver_private, kobj)三、platform设备的相关数据结构
1. platform设备对应的结构体platform_device
struct platform_device {
const char *name; // 设备的名字这将代替device->dev_id,用作sys/device下显示的目录名
int id; // 设备id,用于给插入给该总线并且具有相同name的设备编号,如果只有一个设备的话填-1。
bool id_auto;
struct device dev; // 内嵌device结构
u32 num_resources; // 资源的数目
struct resource *resource; // 资源
const struct platform_device_id *id_entry;
/* MFD cell pointer */
struct mfd_cell *mfd_cell;
/* arch specific additions */
struct pdev_archdata archdata;
};2. resource结构体
struct resource {
resource_size_t start; // 资源的起始地址
resource_size_t end; // 资源的结束地址
const char *name;
unsigned long flags; // 资源的类型
struct resource *parent, *sibling, *child;
};
该结构体非常重要,用于存放设备的资源信息,如IO地址、中断号等。
四、platform_driver的注册过程
platform_driver的注册过程可以简化为如下过程:
platform_driver *drv; // 定义一个平台驱动并初始化
platform_driver_register(drv) // 注册
->>__platform_driver_register(drv, THIS_MODULE)
->>driver_register(&drv->driver)
->>bus_add_driver(&drv->driver)
->>driver_attach(&drv->driver)
->>bus_for_each_dev((&drv->driver)->bus, NULL, &drv->driver, __driver_attach);
->>__driver_attach(&drv->driver, dev)
->>driver_probe_device(&drv->driver, dev)
->>really_probe(dev, &drv->driver)
->>dev->bus->probe(dev) 或 ->>&drv->driver->probe(dev)
将此过程展开如下
:
1. 分配一个platform_driver结构并调用platform_driver_register函数进行注册
#define platform_driver_register(drv) \
__platform_driver_register(drv, THIS_MODULE)
int __platform_driver_register(struct platform_driver *drv,
struct module *owner)
{
drv->driver.owner = owner;
drv->driver.bus = &platform_bus_type; // 设置driver的bus的类型为platform_bus_type
if (drv->probe) // 如果drv含有probe(device_driver类型)则driver上的probe指向总线的probe函数
drv->driver.probe = platform_drv_probe;
if (drv->remove) // 如果drv含有remove(device_driver类型)则driver上的remove指向总线的remove函数
drv->driver.remove = platform_drv_remove;
if (drv->shutdown) // 如果drv含有shutdown(device_driver类型)则driver上的shutdown指向总线的shutdown函数
drv->driver.shutdown = platform_drv_shutdown;
return driver_register(&drv->driver); // 注册平台驱动
}2. 调用driver_register函数将驱动添加到总线的drv链表(其中大部分工作通过调用bus_add_driver函数来完成)
int driver_register(struct device_driver *drv)
{
int ret;
struct device_driver *other;
BUG_ON(!drv->bus->p);
if ((drv->bus->probe && drv->probe) ||
(drv->bus->remove && drv->remove) ||
(drv->bus->shutdown && drv->shutdown))
printk(KERN_WARNING "Driver '%s' needs updating - please use "
"bus_type methods\n", drv->name);
other = driver_find(drv->name, drv->bus);
if (other) {
printk(KERN_ERR "Error: Driver '%s' is already registered, "
"aborting...\n", drv->name);
return -EBUSY;
}
ret = bus_add_driver(drv); // 添加驱动到总线驱动链表即我们上面所说的drv链表
if (ret)
return ret;
ret = driver_add_groups(drv, drv->groups);
if (ret) {
bus_remove_driver(drv);
return ret;
}
kobject_uevent(&drv->p->kobj, KOBJ_ADD);
return ret;
}3. 调用bus_add_driver函数添加驱动到总线
int bus_add_driver(struct device_driver *drv)
{
struct bus_type *bus;
struct driver_private *priv;
int error = 0;
bus = bus_get(drv->bus); // 获取总线类型
if (!bus)
return -EINVAL;
pr_debug("bus: '%s': add driver %s\n", bus->name, drv->name);
priv = kzalloc(sizeof(*priv), GFP_KERNEL); // 分配一个driver_private结构并初始化(也就是drv->p)
if (!priv) {
error = -ENOMEM;
goto out_put_bus;
}
klist_init(&priv->klist_devices, NULL, NULL);
priv->driver = drv;
drv->p = priv;
priv->kobj.kset = bus->p->drivers_kset;
error = kobject_init_and_add(&priv->kobj, &driver_ktype, NULL,
"%s", drv->name); //将drv加入sysfs
if (error)
goto out_unregister;
klist_add_tail(&priv->knode_bus, &bus->p->klist_drivers); //将drv挂入到总线的链表中
if (drv->bus->p->drivers_autoprobe) {
error = driver_attach(drv); //如果总线可以自动的probe,就会调用匹配函数
if (error)
goto out_unregister;
}
module_add_driver(drv->owner, drv); //创建driver相关的模块
error = driver_create_file(drv, &driver_attr_uevent);
if (error) {
printk(KERN_ERR "%s: uevent attr (%s) failed\n",
__func__, drv->name);
}
error = driver_add_groups(drv, bus->drv_groups);
if (error) {
/* How the hell do we get out of this pickle? Give up */
printk(KERN_ERR "%s: driver_create_groups(%s) failed\n",
__func__, drv->name);
}
if (!drv->suppress_bind_attrs) {
error = add_bind_files(drv);
if (error) {
/* Ditto */
printk(KERN_ERR "%s: add_bind_files(%s) failed\n",
__func__, drv->name);
}
}
return 0;
out_unregister:
kobject_put(&priv->kobj);
kfree(drv->p);
drv->p = NULL;
out_put_bus:
bus_put(bus);
return error;
}4. 调用driver_attach函数,对总线drv链表中的驱动与总线dev链表中的设备进行匹配
int driver_attach(struct device_driver *drv)
{
return bus_for_each_dev(drv->bus, NULL, drv, __driver_attach);
}(1)bus_for_each_dev函数源码:
int bus_for_each_dev(struct bus_type *bus, struct device *start,
void *data, int (*fn)(struct device *, void *))
{
struct klist_iter i;
struct device *dev;
int error = 0;
if (!bus || !bus->p)
return -EINVAL;
klist_iter_init_node(&bus->p->klist_devices, &i,
(start ? &start->p->knode_bus : NULL));
while ((dev = next_device(&i)) && !error) // 遍历总线dev链表中的所有设备
error = fn(dev, data); // 判断驱动与设备是否匹配,若匹配则将二者绑定
klist_iter_exit(&i);
return error;
}(2)__driver_attach函数源码:
static int __driver_attach(struct device *dev, void *data)
{
struct device_driver *drv = data;
/*
* Lock device and try to bind to it. We drop the error
* here and always return 0, because we need to keep trying
* to bind to devices and some drivers will return an error
* simply if it didn't support the device.
*
* driver_probe_device() will spit a warning if there
* is an error.
*/
if (!driver_match_device(drv, dev)) // 调用bus的match函数对设备和驱动进行匹配,若不匹配driver_match_device函数的返回值为1,则程序立即返回,若匹配则继续向下执行
return 0;
if (dev->parent) /* Needed for USB */
device_lock(dev->parent);
device_lock(dev);
if (!dev->driver)
driver_probe_device(drv, dev); // 若设备和驱动匹配且设备的驱动程序为空,则将该驱动程序绑定到该设备(调用驱动程序的probe函数)
device_unlock(dev);
if (dev->parent)
device_unlock(dev->parent);
return 0;
}5. 调用driver_probe_device函数,将设备与驱动程序进行绑定(调用probe函数)
int driver_probe_device(struct device_driver *drv, struct device *dev)
{
int ret = 0;
if (!device_is_registered(dev))
return -ENODEV;
pr_debug("bus: '%s': %s: matched device %s with driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
pm_runtime_barrier(dev);
ret = really_probe(dev, drv); // 调用probe
pm_request_idle(dev);
return ret;
}
static int really_probe(struct device *dev, struct device_driver *drv)
{
int ret = 0;
int local_trigger_count = atomic_read(&deferred_trigger_count);
atomic_inc(&probe_count);
pr_debug("bus: '%s': %s: probing driver %s with device %s\n",
drv->bus->name, __func__, drv->name, dev_name(dev));
WARN_ON(!list_empty(&dev->devres_head));
dev->driver = drv;
/* If using pinctrl, bind pins now before probing */
ret = pinctrl_bind_pins(dev);
if (ret)
goto probe_failed;
if (driver_sysfs_add(dev)) {
printk(KERN_ERR "%s: driver_sysfs_add(%s) failed\n",
__func__, dev_name(dev));
goto probe_failed;
}
if (dev->bus->probe) { // 如果设备本身含有probe函数,那么久调用设备的probe函数
ret = dev->bus->probe(dev);
if (ret)
goto probe_failed;
} else if (drv->probe) { // 如果设备不含有probe函数,那么就调用驱动程序的probe函数
ret = drv->probe(dev);
if (ret)
goto probe_failed;
}
driver_bound(dev);
ret = 1;
pr_debug("bus: '%s': %s: bound device %s to driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
goto done;
probe_failed:
devres_release_all(dev);
driver_sysfs_remove(dev);
dev->driver = NULL;
dev_set_drvdata(dev, NULL);
if (ret == -EPROBE_DEFER) {
/* Driver requested deferred probing */
dev_info(dev, "Driver %s requests probe deferral\n", drv->name);
driver_deferred_probe_add(dev);
/* Did a trigger occur while probing? Need to re-trigger if yes */
if (local_trigger_count != atomic_read(&deferred_trigger_count))
driver_deferred_probe_trigger();
} else if (ret != -ENODEV && ret != -ENXIO) {
/* driver matched but the probe failed */
printk(KERN_WARNING
"%s: probe of %s failed with error %d\n",
drv->name, dev_name(dev), ret);
} else {
pr_debug("%s: probe of %s rejects match %d\n",
drv->name, dev_name(dev), ret);
}
/*
* Ignore errors returned by ->probe so that the next driver can try
* its luck.
*/
ret = 0;
done:
atomic_dec(&probe_count);
wake_up(&probe_waitqueue);
return ret;
}
static int platform_drv_probe(struct device *_dev)
{
struct platform_driver *drv = to_platform_driver(_dev->driver);
struct platform_device *dev = to_platform_device(_dev);
int ret;
if (ACPI_HANDLE(_dev))
acpi_dev_pm_attach(_dev, true);
ret = drv->probe(dev); // 此处间接地调用了platform_driver提供的probe函数
if (ret && ACPI_HANDLE(_dev))
acpi_dev_pm_detach(_dev, true);
if (drv->prevent_deferred_probe && ret == -EPROBE_DEFER) {
dev_warn(_dev, "probe deferral not supported\n");
ret = -ENXIO;
}
return ret;
}五、platform_device的注册过程
platform_device的注册过程可以简化为以下过程:struct platform_device *pdev; // 定义一个平台设备并初始化
platform_device_register(pdev) // 注册
->>platform_device_add(pdev)
->>device_add(&pdev->dev)
->>bus_probe_device(&pdev->dev)
->>device_attach(&pdev->dev)
->>bus_for_each_drv(&(pdev->dev)->bus, NULL, &pdev->dev, __device_attach)
->>__device_attach(drv, &pdev->dev)
->>driver_probe_device(drv, &pdev->dev)
->>really_probe(&pdev->dev, drv)
->>&pdev->dev->bus->probe(dev) 或 drv->probe(dev)1. 分配一个platform_device结构并调用platform_device_register函数进行注册
int platform_device_register(struct platform_device *pdev)
{
device_initialize(&pdev->dev); // 初始化platform_device的device成员
arch_setup_pdev_archdata(pdev);
return platform_device_add(pdev); // 向内核添加一个平台设备
}2. 调用platform_device_add函数向内核添加一个平台设备
int platform_device_add(struct platform_device *pdev)
{
int i, ret;
if (!pdev)
return -EINVAL;
if (!pdev->dev.parent) //如果pdev->dev.parent为空则将pdev->dev.parent设置为platform_bus
pdev->dev.parent = &platform_bus;
pdev->dev.bus = &platform_bus_type; // 设置总线类型为platform_bus_type
switch (pdev->id) { // 分配名字
default:
dev_set_name(&pdev->dev, "%s.%d", pdev->name, pdev->id);
break;
case PLATFORM_DEVID_NONE:
dev_set_name(&pdev->dev, "%s", pdev->name);
break;
case PLATFORM_DEVID_AUTO:
/*
* Automatically allocated device ID. We mark it as such so
* that we remember it must be freed, and we append a suffix
* to avoid namespace collision with explicit IDs.
*/
ret = ida_simple_get(&platform_devid_ida, 0, 0, GFP_KERNEL);
if (ret < 0)
goto err_out;
pdev->id = ret;
pdev->id_auto = true;
dev_set_name(&pdev->dev, "%s.%d.auto", pdev->name, pdev->id);
break;
}
for (i = 0; i < pdev->num_resources; i++) { // 获取资源
struct resource *p, *r = &pdev->resource[i];
if (r->name == NULL)
r->name = dev_name(&pdev->dev);
p = r->parent;
if (!p) { // 设置资源类型
if (resource_type(r) == IORESOURCE_MEM)
p = &iomem_resource;
else if (resource_type(r) == IORESOURCE_IO)
p = &ioport_resource;
}
if (p && insert_resource(p, r)) {
dev_err(&pdev->dev, "failed to claim resource %d\n", i);
ret = -EBUSY;
goto failed;
}
}
pr_debug("Registering platform device '%s'. Parent at %s\n",
dev_name(&pdev->dev), dev_name(pdev->dev.parent));
ret = device_add(&pdev->dev); // 向内核添加一个device
if (ret == 0)
return ret;
failed:
if (pdev->id_auto) {
ida_simple_remove(&platform_devid_ida, pdev->id);
pdev->id = PLATFORM_DEVID_AUTO;
}
while (--i >= 0) {
struct resource *r = &pdev->resource[i];
unsigned long type = resource_type(r);
if (type == IORESOURCE_MEM || type == IORESOURCE_IO)
release_resource(r);
}
err_out:
return ret;
}3. 调用device_add函数向内核添加一个device
int device_add(struct device *dev)
{
struct device *parent = NULL;
struct kobject *kobj;
struct class_interface *class_intf;
int error = -EINVAL;
dev = get_device(dev);
if (!dev)
goto done;
if (!dev->p) {
error = device_private_init(dev);
if (error)
goto done;
}
/*
* for statically allocated devices, which should all be converted
* some day, we need to initialize the name. We prevent reading back
* the name, and force the use of dev_name()
*/
if (dev->init_name) {
dev_set_name(dev, "%s", dev->init_name);
dev->init_name = NULL;
}
/* subsystems can specify simple device enumeration */
if (!dev_name(dev) && dev->bus && dev->bus->dev_name)
dev_set_name(dev, "%s%u", dev->bus->dev_name, dev->id);
if (!dev_name(dev)) {
error = -EINVAL;
goto name_error;
}
pr_debug("device: '%s': %s\n", dev_name(dev), __func__);
parent = get_device(dev->parent);
kobj = get_device_parent(dev, parent);
if (kobj)
dev->kobj.parent = kobj;
/* use parent numa_node */
if (parent)
set_dev_node(dev, dev_to_node(parent));
/* first, register with generic layer. */
/* we require the name to be set before, and pass NULL */
error = kobject_add(&dev->kobj, dev->kobj.parent, NULL);
if (error)
goto Error;
/* notify platform of device entry */
if (platform_notify)
platform_notify(dev);
error = device_create_file(dev, &dev_attr_uevent);
if (error)
goto attrError;
if (MAJOR(dev->devt)) {
error = device_create_file(dev, &dev_attr_dev);
if (error)
goto ueventattrError;
error = device_create_sys_dev_entry(dev);
if (error)
goto devtattrError;
devtmpfs_create_node(dev);
}
error = device_add_class_symlinks(dev);
if (error)
goto SymlinkError;
error = device_add_attrs(dev);
if (error)
goto AttrsError;
error = bus_add_device(dev);
if (error)
goto BusError;
error = dpm_sysfs_add(dev);
if (error)
goto DPMError;
device_pm_add(dev);
/* Notify clients of device addition. This call must come
* after dpm_sysfs_add() and before kobject_uevent().
*/
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_ADD_DEVICE, dev);
kobject_uevent(&dev->kobj, KOBJ_ADD);
bus_probe_device(dev); // 为总线上的设备寻找驱动
if (parent)
klist_add_tail(&dev->p->knode_parent,
&parent->p->klist_children);
if (dev->class) {
mutex_lock(&dev->class->p->mutex);
/* tie the class to the device */
klist_add_tail(&dev->knode_class,
&dev->class->p->klist_devices);
/* notify any interfaces that the device is here */
list_for_each_entry(class_intf,
&dev->class->p->interfaces, node)
if (class_intf->add_dev)
class_intf->add_dev(dev, class_intf);
mutex_unlock(&dev->class->p->mutex);
}
done:
put_device(dev);
return error;
DPMError:
bus_remove_device(dev);
BusError:
device_remove_attrs(dev);
AttrsError:
device_remove_class_symlinks(dev);
SymlinkError:
if (MAJOR(dev->devt))
devtmpfs_delete_node(dev);
if (MAJOR(dev->devt))
device_remove_sys_dev_entry(dev);
devtattrError:
if (MAJOR(dev->devt))
device_remove_file(dev, &dev_attr_dev);
ueventattrError:
device_remove_file(dev, &dev_attr_uevent);
attrError:
kobject_uevent(&dev->kobj, KOBJ_REMOVE);
kobject_del(&dev->kobj);
Error:
cleanup_device_parent(dev);
if (parent)
put_device(parent);
name_error:
kfree(dev->p);
dev->p = NULL;
goto done;
}4. 调用bus_probe_device函数为总线上的设备寻找驱动
void bus_probe_device(struct device *dev)
{
struct bus_type *bus = dev->bus;
struct subsys_interface *sif;
int ret;
if (!bus)
return;
if (bus->p->drivers_autoprobe) {
ret = device_attach(dev); // 调用device_attach()进行实际的寻找
WARN_ON(ret < 0);
}
mutex_lock(&bus->p->mutex);
list_for_each_entry(sif, &bus->p->interfaces, node)
if (sif->add_dev)
sif->add_dev(dev, sif);
mutex_unlock(&bus->p->mutex);
}
int device_attach(struct device *dev)
{
int ret = 0;
device_lock(dev);
if (dev->driver) {
if (klist_node_attached(&dev->p->knode_driver)) {
ret = 1;
goto out_unlock;
}
ret = device_bind_driver(dev);
if (ret == 0)
ret = 1;
else {
dev->driver = NULL;
ret = 0;
}
} else {
ret = bus_for_each_drv(dev->bus, NULL, dev, __device_attach); // 遍历bus的drv链表为设备寻找驱动
pm_request_idle(dev);
}
out_unlock:
device_unlock(dev);
return ret;
}(1) bus_for_each_drv函数源码:
int bus_for_each_drv(struct bus_type *bus, struct device_driver *start,
void *data, int (*fn)(struct device_driver *, void *))
{
struct klist_iter i;
struct device_driver *drv;
int error = 0;
if (!bus)
return -EINVAL;
klist_iter_init_node(&bus->p->klist_drivers, &i,
start ? &start->p->knode_bus : NULL);
while ((drv = next_driver(&i)) && !error) // 遍历整个drv链表
error = fn(drv, data); // 寻找该设备匹配的驱动程序,若匹配则将二者绑定
klist_iter_exit(&i);
return error;
}(2)__device_attach函数源码:
static int __device_attach(struct device_driver *drv, void *data)
{
struct device *dev = data;
if (!driver_match_device(drv, dev)) // 调用bus的match函数对设备和驱动进行匹配,若不匹配driver_match_device函数的返回值为1,则程序立即返回,若匹配则继续向下执行
return 0;
return driver_probe_device(drv, dev); // 若设备和驱动匹配,则将该驱动程序绑定到该设备
}
static inline int driver_match_device(struct device_driver *drv,
struct device *dev)
{
return drv->bus->match ? drv->bus->match(dev, drv) : 1;
}5. 调用driver_probe_device将设备与驱动程序进行绑定(调用probe函数)
int driver_probe_device(struct device_driver *drv, struct device *dev)
{
int ret = 0;
if (!device_is_registered(dev))
return -ENODEV;
pr_debug("bus: '%s': %s: matched device %s with driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
pm_runtime_barrier(dev);
ret = really_probe(dev, drv); // 调用probe
pm_request_idle(dev);
return ret;
}
static int really_probe(struct device *dev, struct device_driver *drv)
{
int ret = 0;
int local_trigger_count = atomic_read(&deferred_trigger_count);
atomic_inc(&probe_count);
pr_debug("bus: '%s': %s: probing driver %s with device %s\n",
drv->bus->name, __func__, drv->name, dev_name(dev));
WARN_ON(!list_empty(&dev->devres_head));
dev->driver = drv;
/* If using pinctrl, bind pins now before probing */
ret = pinctrl_bind_pins(dev);
if (ret)
goto probe_failed;
if (driver_sysfs_add(dev)) {
printk(KERN_ERR "%s: driver_sysfs_add(%s) failed\n",
__func__, dev_name(dev));
goto probe_failed;
}
if (dev->bus->probe) { // 如果设备本身含有probe函数,那么久调用设备的probe函数
ret = dev->bus->probe(dev);
if (ret)
goto probe_failed;
} else if (drv->probe) { // 如果设备不含有probe函数,那么就调用驱动程序的probe函数
ret = drv->probe(dev);
if (ret)
goto probe_failed;
}
driver_bound(dev);
ret = 1;
pr_debug("bus: '%s': %s: bound device %s to driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
goto done;
probe_failed:
devres_release_all(dev);
driver_sysfs_remove(dev);
dev->driver = NULL;
dev_set_drvdata(dev, NULL);
if (ret == -EPROBE_DEFER) {
/* Driver requested deferred probing */
dev_info(dev, "Driver %s requests probe deferral\n", drv->name);
driver_deferred_probe_add(dev);
/* Did a trigger occur while probing? Need to re-trigger if yes */
if (local_trigger_count != atomic_read(&deferred_trigger_count))
driver_deferred_probe_trigger();
} else if (ret != -ENODEV && ret != -ENXIO) {
/* driver matched but the probe failed */
printk(KERN_WARNING
"%s: probe of %s failed with error %d\n",
drv->name, dev_name(dev), ret);
} else {
pr_debug("%s: probe of %s rejects match %d\n",
drv->name, dev_name(dev), ret);
}
/*
* Ignore errors returned by ->probe so that the next driver can try
* its luck.
*/
ret = 0;
done:
atomic_dec(&probe_count);
wake_up(&probe_waitqueue);
return ret;
}















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









