







void FeaHom(){
Mat img_object = imread("hours.jpg");
Mat img_scene = imread("findhours.jpg");
int minHessian = 800;
SurfFeatureDetector detector(minHessian);
vector<KeyPoint>keypoints_object, keypoints_scene;
detector.detect(img_object, keypoints_object);
detector.detect(img_scene, keypoints_scene);
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute(img_object, keypoints_object, descriptors_object);
extractor.compute(img_scene, keypoints_scene, descriptors_scene);
FlannBasedMatcher matcher;
vector<DMatch>matches;
matcher.match(descriptors_object, descriptors_scene, matches);
double max_dist = 0; double min_dist = 100;
for (int i = 0; i < descriptors_object.rows; ++i){
double dist = matches[i].distance;
if (dist < min_dist)min_dist = dist;
if (dist > max_dist)max_dist = dist;
}
vector<DMatch>good_matches;
for (int i = 0; i < descriptors_object.rows; ++i)
{
if (matches[i].distance<3*min_dist)
{
good_matches.push_back(matches[i]);
}
}
Mat img_matches;
drawMatches(img_object, keypoints_object, img_scene, keypoints_scene,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
vector<Point2f>obj;
vector<Point2f>scene;
for (int i = 0; i < good_matches.size(); ++i){
obj.push_back(keypoints_object[good_matches[i].queryIdx].pt);
scene.push_back(keypoints_scene[good_matches[i].trainIdx].pt);
}
Mat H = findHomography(obj, scene, CV_RANSAC);
vector<Point2f>obj_corners(4);
obj_corners[0] = cvPoint(0, 0);
obj_corners[1] = cvPoint(img_object.cols,0);
obj_corners[2] = cvPoint(img_object.cols, img_object.rows);
obj_corners[3] = cvPoint(0, img_object.rows);
vector<Point2f>scene_corners(4);
perspectiveTransform(obj_corners, scene_corners, H);
line(img_matches, scene_corners[0] + Point2f(img_object.cols, 0), scene_corners[1] + Point2f(img_object.cols, 0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[1] + Point2f(img_object.cols, 0), scene_corners[2] + Point2f(img_object.cols, 0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[2] + Point2f(img_object.cols, 0), scene_corners[3] + Point2f(img_object.cols, 0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[3] + Point2f(img_object.cols, 0), scene_corners[0] + Point2f(img_object.cols, 0), Scalar(0, 255, 0), 4);
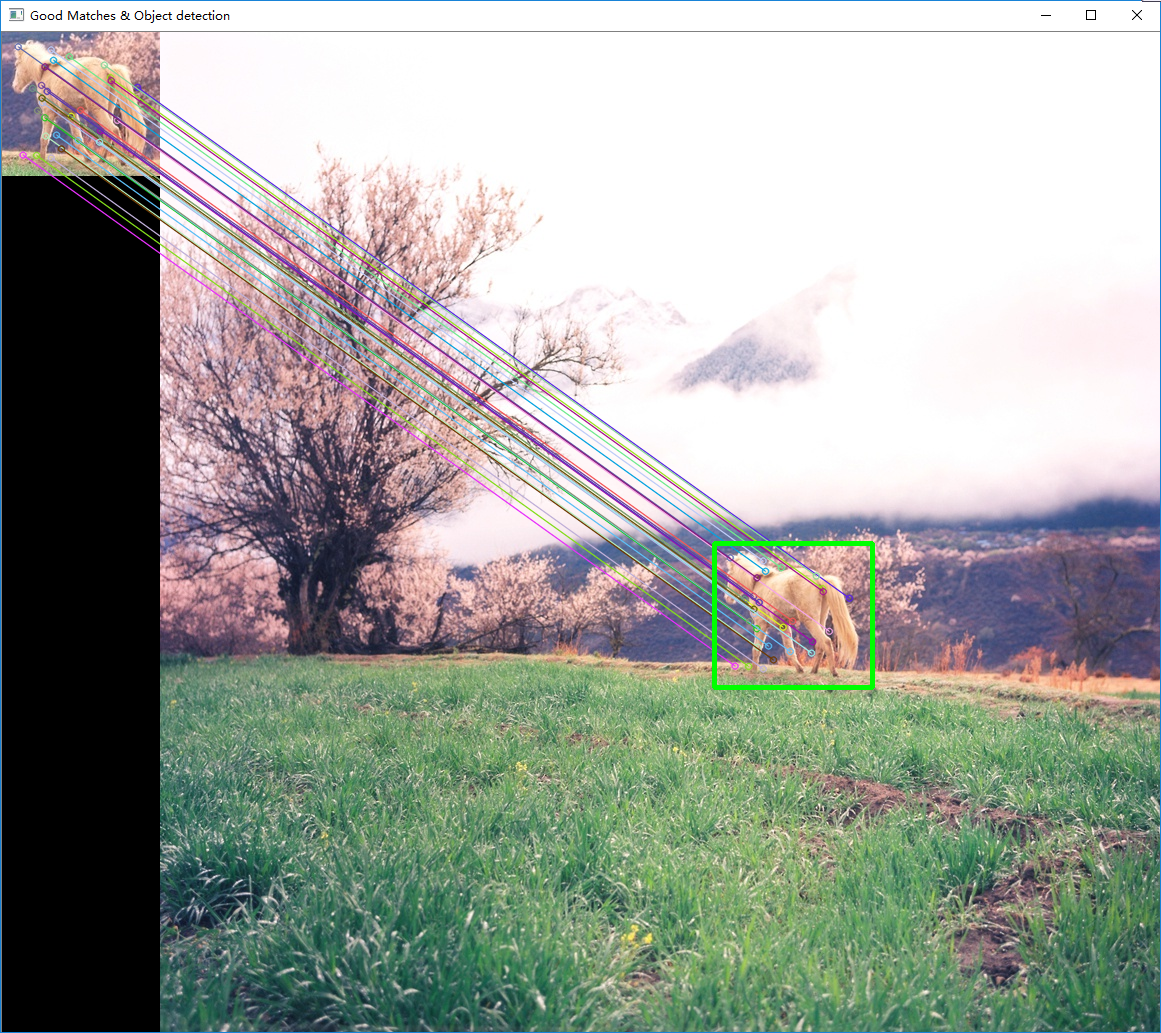
imshow("Good Matches & Object detection", img_matches);
waitKey(0);
}Features2D + Homography物体识别
最新推荐文章于 2022-06-16 15:52:19 发布
















 506
506

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









