







文章目录
1. 概述
1.1 PIBOT介绍
apollo、zeus、hades、hera和apolloX是派宝机器人科技专门针对ROS开发的移动差分两轮小车、全向三轮小车、全向四麦克纳姆轮小车、差分四轮驱动和大负载差分两轮小车
1.2 主要应用
ROS机器人教学- 机器人创客开发
- 服务机器人研发
AGV研发
1.3 应用场景
室内平坦地面
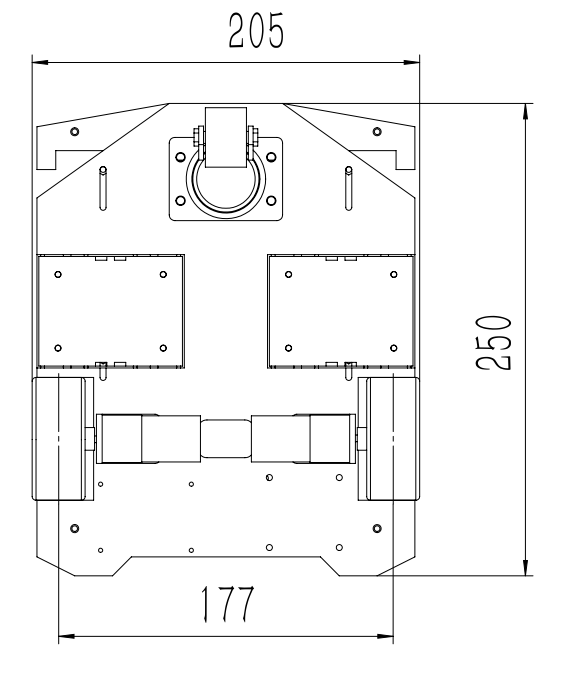
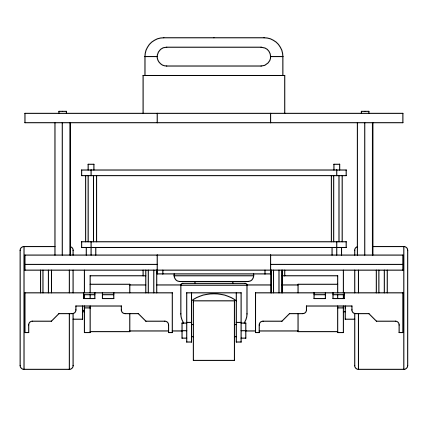
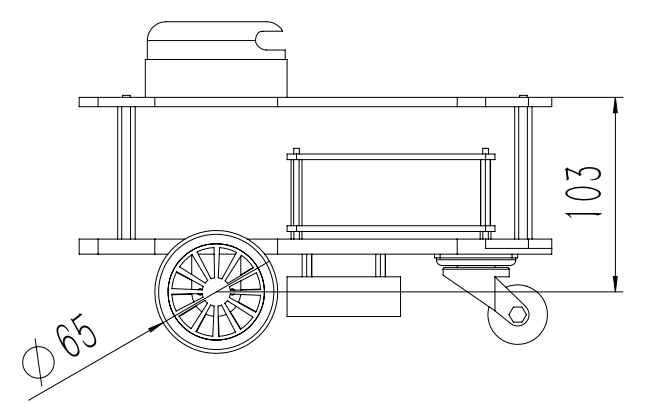
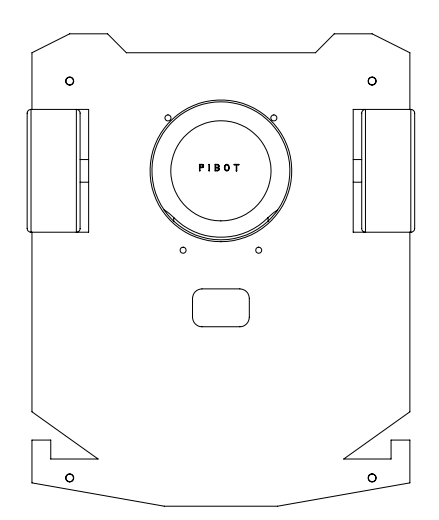
1.4外观图





1.5 购买链接
2. 功能简介
- 速度精准控制,支持角速度和线速度并发
PID控制动态调节,动态曲线显示- 通过USB(USB转串口)与上位机互连通讯,运动解算及
PID速度环都在下位控制器完成,只需要通过串口命令发送线速度与角速度即可驱动小车底盘,同时可以直接读取小车的实时位置及实时速度信息(上位驱动都已实现) - 9轴
IMU滤波算法,IMU里程计卡尔曼滤波融合算法支持 - 基于
ROS的激光雷达构建地图SLAM,支持键盘、手柄或者手机APP控制建图;支持RVIZ选点建图 - 基于
ROS的室内自动导航与避障,AMCL的定位 - 基于摄像头的远程监控及APP同步显示
- 手机
APP控制移动、小车位置设定,导航目标设定及路径显示(需要ROS上位机支持,即树莓派/RK3288/RK3399/X86工控机/TK1/TX1/TX2等)

- 提供完善的文档和丰富的示例
- 支持模拟器,无需硬件环境可以直接使用使用模拟建图与导航
- 开源所有代码,包括底层
STM32F1/STM32F4/Arduino代码,上位机树莓派/RK3288/RK3399/X86工控机/TK1/TX1/TX2中的ROS驱动代码导航配置,Android App代码
3 硬件介绍
3.1 硬件清单
两轮差分Apollo
主要机械部件:
- 小车主体
小车底盘采用双层亚克力+双层主板亚克力。
- 底盘
- 主动轮:直径65mm优质橡胶轮 2个
- 从动轮:1.5寸尼龙万向轮 1个
- 减速编码器电机:2个495线,轮子转动一圈会产生的脉冲信号高达1980个
- 电子控制部件:
Arduino Mega 2560或SMT32F103主控板或SMT32F407主控板:1个- TB6612电机驱动模块:1个
- 9轴
IMU模块:1个 树莓派/RK3288/RK3399/X86主树莓派/RK3288/RK3399/X86工控机/TK1/TX1/TX2机(内嵌ROS系统)
- 其他部件:
12V、6800mAh锂电池+充电器: 1个
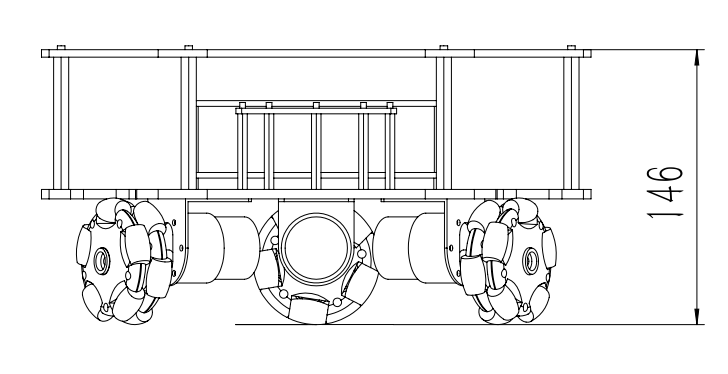
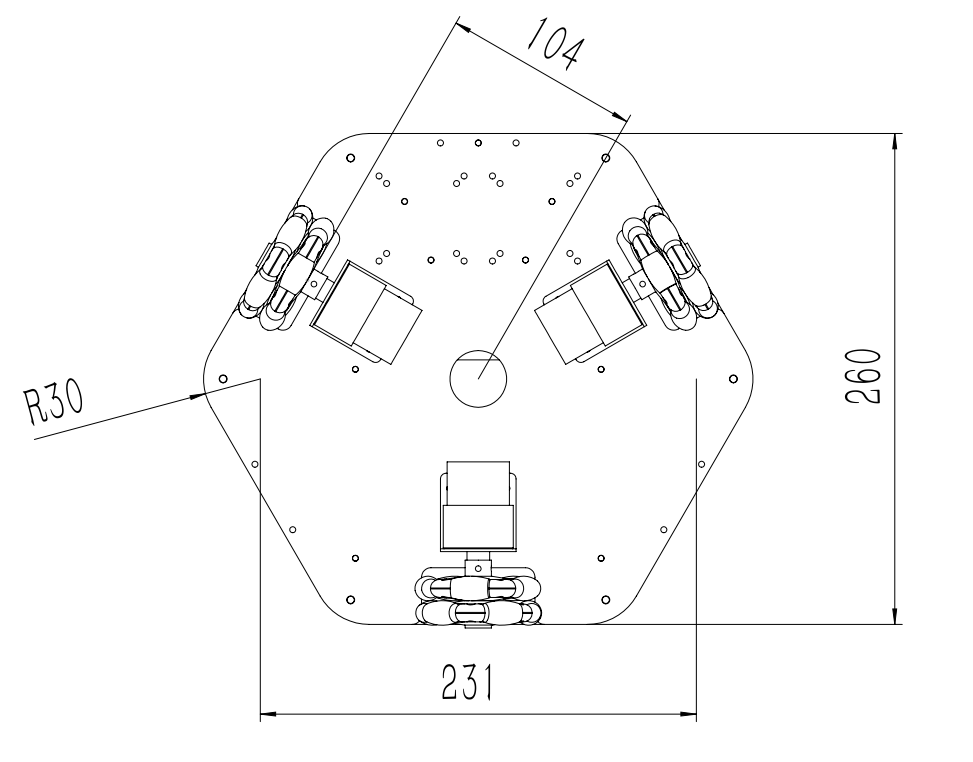
三轮全向Zeus
主要机械部件:
- 小车底盘采用4MM双层亚克力+3MM双层电路板基板的亚克力板,外观简洁美观,安装方便
- 底盘
- 主动轮:58毫米全向轮
- 减速编码器电机:3个 990线,轮子转动一圈会产生的脉冲信号高达3960个
- 电子控制部件:
- SMT32F407主控板:1个
- TB6612电机驱动模块:2个
- 9轴
IMU模块:1个 树莓派/RK3288/RK3399/X86工控机(内嵌ROS系统)
- 其他部件:
- 12V、10000mAh锂电池+充电器: 1个
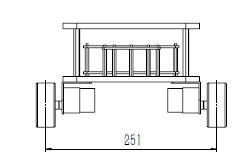
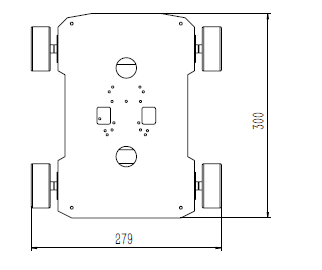
四轮全向麦克纳姆轮Hades
主要机械部件:
- 小车底盘采用4MM双层亚克力/3mm铝合金+3MM双层电路板基板的亚克力板,外观简洁美观,安装方便
- 底盘
- 主动轮:60毫米麦克纳姆轮
- 减速编码器电机:4个 990线,轮子转动一圈会产生的脉冲信号高达3960个
- 电子控制部件:
- SMT32F407主控板:1个
- TB6612电机驱动模块:2个
- 9轴
IMU模块:1个 树莓派/RK3288/RK3399/X86工控机(内嵌ROS系统)
- 其他部件:
12V、10000mAh锂电池+充电器: 1个
四轮差分Hera
主要机械部件:
- 小车底盘采用4MM双层亚克力/3mm铝合金+3MM双层电路板基板的亚克力板,外观简洁美观,安装方便
- 底盘
- 主动轮:85毫米橡胶轮
- 减速编码器电机:4个 990线,轮子转动一圈会产生的脉冲信号高达3960个
- 电子控制部件:
- SMT32F407主控板:1个
- TB6612电机驱动模块:2个
- 9轴
IMU模块:1个 树莓派/RK3288/RK3399/X86工控机(内嵌ROS系统)
- 其他部件:
12V、10000mAh锂电池+充电器: 1个
大负载2轮差分ApolloX
主要机械部件:
-
小车底盘采用多层亚克力或者铝合金结构,外观简洁美观,安装方便!
-
底盘
- 主动轮:直径95mm优质橡胶轮 2个
- 从动轮:78mm全向轮 1个
- 减速编码器电机:2个990线,轮子转动一圈会产生的脉冲信号高达3960个
-
电子控制部件:
Arduino Mega 2560单片机控制板+扩展板或SMT32F103主控板:1个- WSDC2412D双路大功率驱动模块:1个
- 9轴
IMU模块:1个 树莓派/RK3288/RK3399/TK1/TX1/TX2/X86主机(内嵌ROS系统)
-
其他部件:
12V/24V、10000mAh锂电池+充电器: 1个
4. 硬件连接

5. 软件介绍
5.1 框架图
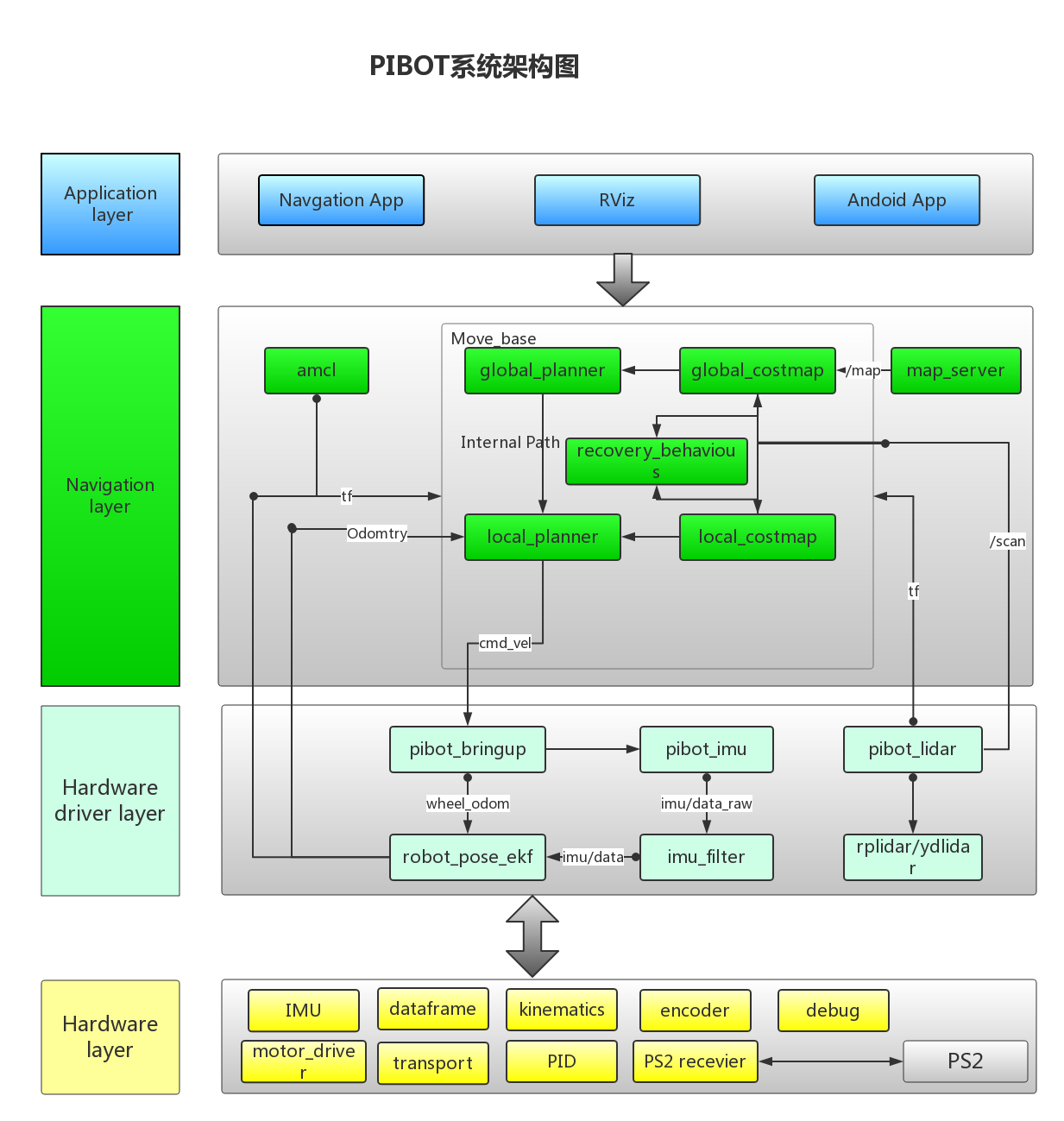
5.2 下位机
- 下位机可以支持多种不同类型的主控单元
Arduino Mega 2560为主控单元,使用Visual studio code+Platform IO进行开发,支持Windows和ubuntu环境STM32F1为主控单元,使用Keil进行开发STM32F4为主控单元,Ubuntu下使用Visual studio code进行开发
- 下位机可以支持不同的机器人模型,即一套程序适配两轮差分、四轮差分、三轮全向、四轮麦克纳姆轮,只需修改相应的参数即可
5.3 上位机
采用树莓派/RK3288/RK3399/X86主机/TK1/TX1/TX2等作为上位ROS主控
5.4 通讯方式
下位机及通过串口与树莓派/RK3288/RK3399、X86主机/TK1/TX1/TX2通讯,协议为较为灵活的自定义格式,方便新增命令
5.5 支持模拟器
PIBOT包内置了模拟器,可以直接运行模拟导航,无需小车也可以模拟导航了
5.6 Android App
PIBOT提供Android App, App可以完成控制行走、显示地图和显示视频和下发导航命令等功能
附录
apollo建图视频
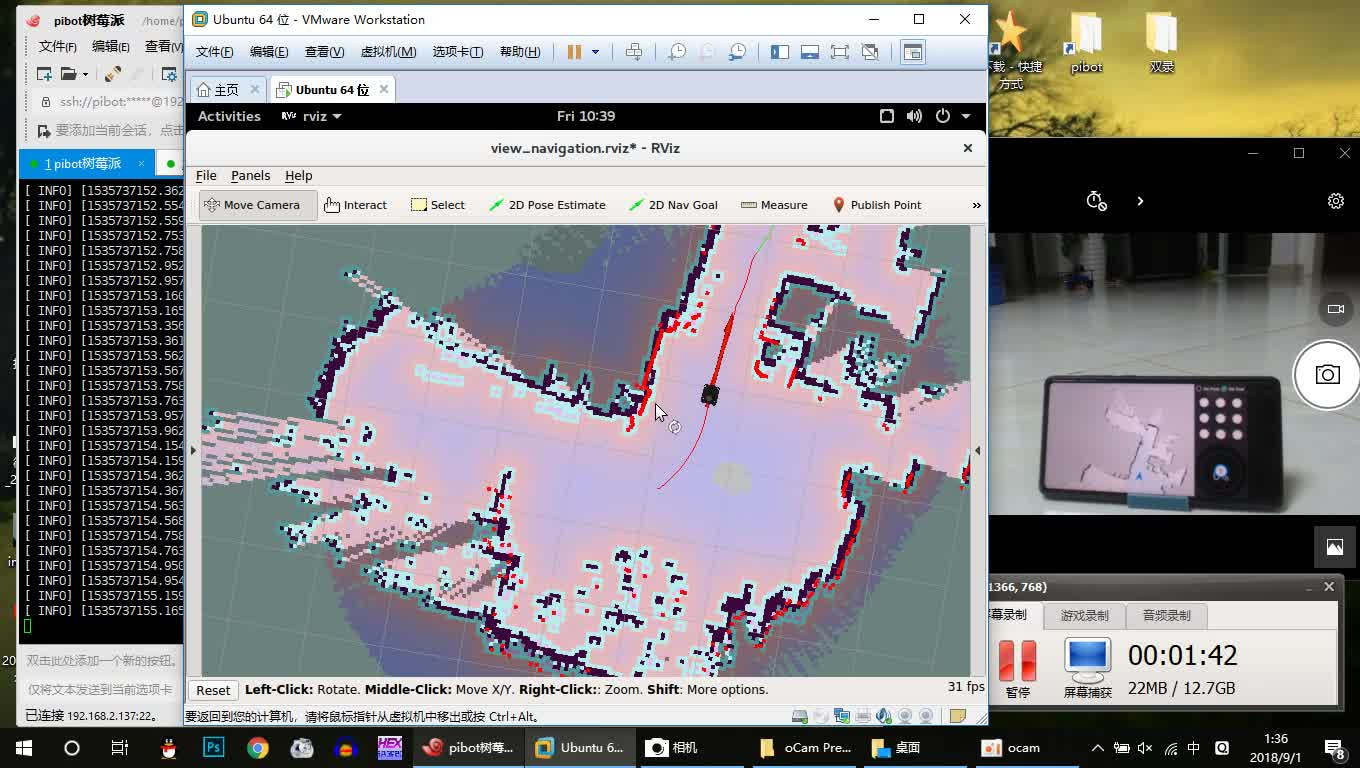
apollo导航视频
zeus建图视频
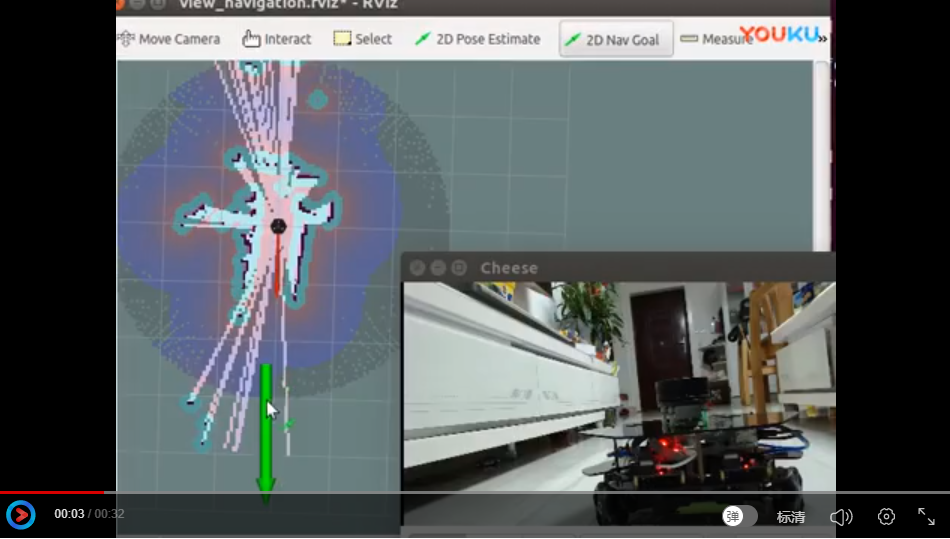
zeus导航视频
HadesX建图视频
HadesX导航视频

















 617
617

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









