






一,残差网络架构

1,残差学习单元

上图左对应的是浅层网络(18层,34层),而右图对应的是深层网络(50,101,152)。
1. 左图为基本的residual block,residual mapping为两个64通道的3x3卷积,输入输出均为64通道,可直接相加。该block主要使用在相对浅层网络,比如ResNet-34;
2. 右图为针对深层网络提出的block,称为“bottleneck” block,主要目的就是为了降维。首先通过一个1x1卷积将256维通道(channel)降到64通道,最后通过一个256通道的1x1卷积恢复。
ResNet使用两种残差单元,其目的主要就是为了降低参数的数目。
2,残差学习好在哪里?
随着网络加深,梯度消失,模型准确率会先上升然后达到饱和,再持续增加深度时则会导致准确率下降。
残差跳跃式的结构,打破了传统的神经网络n-1层的输出只能给n层作为输入的惯例,使某一层的输出可以直接跨过几层作为后面某一层的输入,其意义在于为叠加多层网络而使得整个学习模型的错误率不降反升的难题提供了新的方向。至此,神经网络的层数可以超越之前的约束,达到几十层、上百层甚至千层,为高级语义特征提取和分类提供了可行性。
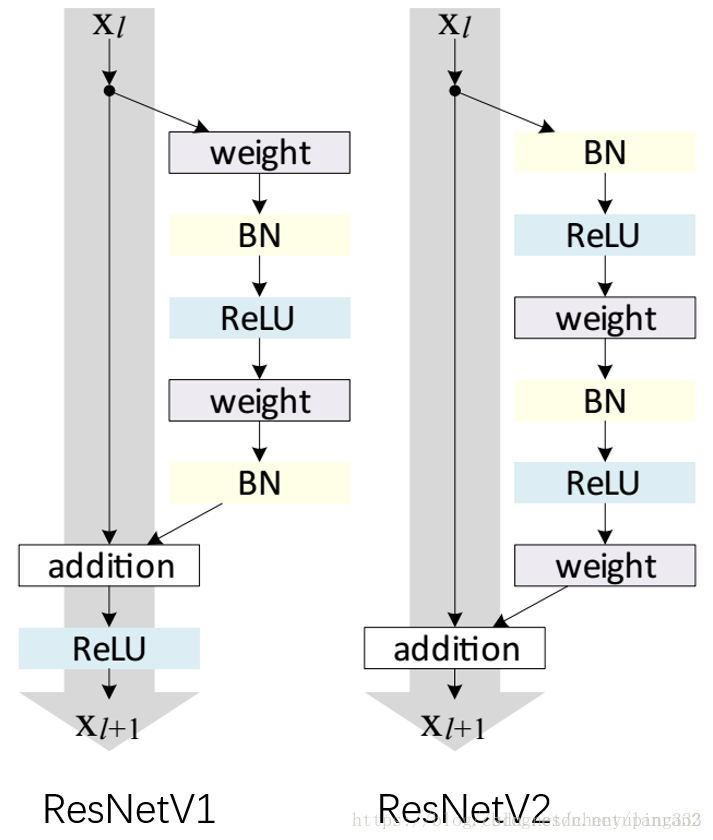
3,ResNet改进版本
新的残差学习单元比以前更容易训练且泛化性更强。
二,两种残差单元对应的Pytorch源码
- a,两个卷积层的残差单元
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
base_width=64, dilation=1, norm_layer=None):
super(BasicBlock, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if groups != 1 or base_width != 64:
raise ValueError('BasicBlock only supports groups=1 and base_width=64')
if dilation > 1:
raise NotImplementedError("Dilation > 1 not supported in BasicBlock")
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = norm_layer(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = norm_layer(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
- b, 有瓶颈块的三层残差单元
class Bottleneck(nn.Module):
# Bottleneck in torchvision places the stride for downsampling at 3x3 convolution(self.conv2)
# while original implementation places the stride at the first 1x1 convolution(self.conv1)
# according to "Deep residual learning for image recognition"https://arxiv.org/abs/1512.03385.
# This variant is also known as ResNet V1.5 and improves accuracy according to
# https://ngc.nvidia.com/catalog/model-scripts/nvidia:resnet_50_v1_5_for_pytorch.
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
base_width=64, dilation=1, norm_layer=None):
super(Bottleneck, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
width = int(planes * (base_width / 64.)) * groups
# Both self.conv2 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv1x1(inplanes, width)
self.bn1 = norm_layer(width)
self.conv2 = conv3x3(width, width, stride, groups, dilation)
self.bn2 = norm_layer(width)
self.conv3 = conv1x1(width, planes * self.expansion)
self.bn3 = norm_layer(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
c,整个ResNet架构
对输入图像使用一个步长为2,卷积核为7×7的卷积层(紧接着BN,Relu),紧接着是4个残差学习块,不同深度的残差网络包含的每层残差学习块的个数不同(参考图1残差网络架构中的参数),最后是一个全局池化层和一个全连接层。
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000):
self.inplanes = 64
super(ResNet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7, stride=1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
感谢解读
https://blog.csdn.net/chenyuping333/article/details/82344334
ResNet网络全部源码https://github.com/pytorch/vision/blob/master/torchvision/models/resnet.py














 3642
3642











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









