









一、概述:什么是 NVIDIA Cosmos™?
NVIDIA Cosmos™ 是一套面向未来的物理人工智能(Physical AI)开发平台,集成了最前沿的 生成式世界基础模型(World Foundation Models, WFMs)、高性能 Tokenizer、内建安全护栏(Guardrails)系统,以及全流程加速的数据处理与整理管道。
Cosmos 平台专为自动驾驶汽车(AV)和机器人领域设计,旨在为 世界模型训练 提供强大支撑,并以更高效、更安全的方式推进物理 AI 技术的发展与落地。
该平台集成了:
- 生成式世界基础模型(World Foundation Models,简称 WFM)
- 多模态 Tokenizer
- 安全 Guardrail 机制
- 高效加速的数据处理与标注管道、
其目标是在虚拟世界中完成真实世界任务的训练与验证,大幅降低现实测试风险。
简言之,Cosmos 是构建“物理 AI 智能体”的底座,让 AI 模型在模拟世界中看见、理解、预测并采取行动。
二、平台架构:Cosmos 的四大核心模块
Cosmos 平台由四个高度协同的子系统组成,覆盖从世界建模到智能推理的全过程。
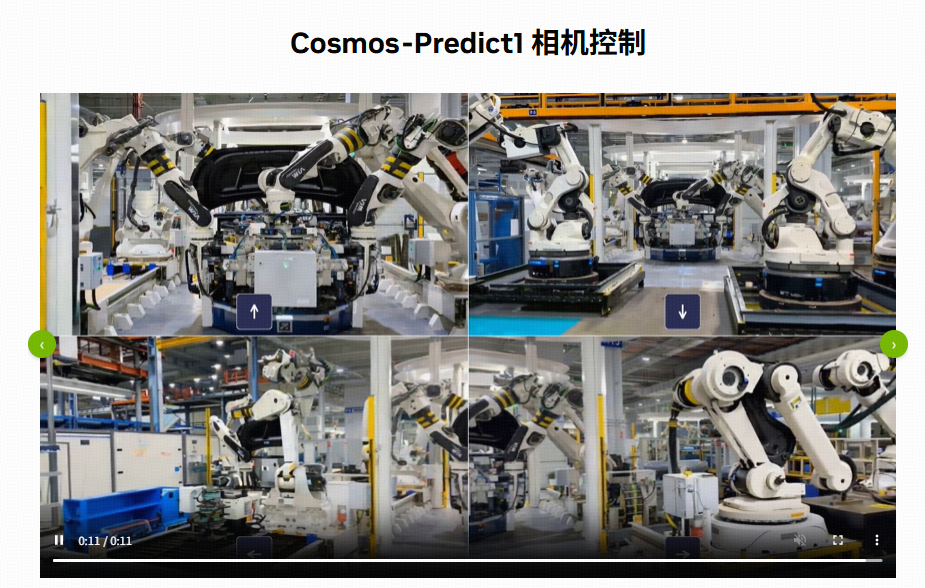
1. Cosmos Predict:多模态世界生成与帧预测
- 功能定位: 通用型世界生成与运动预测模型
- -技术特性:
- 支持图像、文字、语义图等多模态输入
- 自动生成未来帧序列,预测目标运动轨迹
- 训练数据规模高达 9,000 万亿 tokens
- 支持 40 亿到 150 亿参数规模,覆盖边缘到云端部署
该模块可作为模拟器替代物理世界,在智能体训练与验证中大显身手。
2. Cosmos Transfer:物理感知与数据增强模块
-
功能定位: 使用结构化输入生成可控世界场景
-
关键能力:
- 支持使用深度图、语义图、激光点云等真实数据
- 与 NVIDIA Omniverse™ 集成,合成多种天气/照明环境
- 提供高保真的仿真环境用于模型预训练与迁移学习
- 用于大规模 可控合成数据生成,极大缓解标注数据稀缺问题。
3. Cosmos Reason:推理与任务规划引擎
- 功能定位: 多模态理解与计划模型
- 技术栈:
- 基于视觉语言模型(VLM)微调
- 引入强化学习(RL)机制优化 Chain-of-Thought 风格推理
- 理解空间、时间、物体行为及其因果关系
- 用于执行任务规划、行为预测、导航与路径优化等关键场景。
4. Cosmos Guardrail:安全控制与责任输出机制
- 功能定位: 保障输入输出的合法性与安全性
- 机制简介:
- Pre-Guard:输入过滤机制,拒绝不安全提示
- Post-Guard:输出修正机制,增强稳定性和伦理合规性
- 为生成式物理智能体提供责任护栏,确保部署安全。
三、技术核心:什么是 WFM(世界基础模型)?
World Foundation Model(WFM) 是 Cosmos 的底层支撑技术,是一种专门为物理世界感知与模拟设计的生成式世界模型。
🔧 技术定义
WFM 能够在模拟空间中重构真实物理交互环境,学习物体之间的动态因果机制与演化过程。
相比传统的世界建模系统,WFM 具备:
- 连续潜空间(Continuous Latent)与离散潜空间(Discrete Latent)的建模能力
- 可扩展至多模态输入(视觉、语言、轨迹、深度等)
- 具备从起始帧生成中间状态序列的能力,适用于视频生成、运动模拟等场景
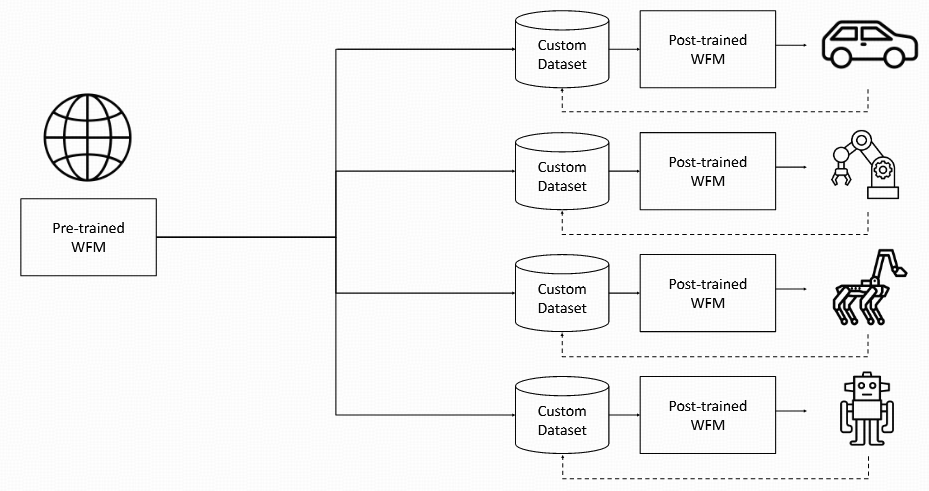
🧠 训练流程解析:
(1)预训练阶段(Pre-training)
- 在大规模视频数据(含机器人、自动驾驶等)上训练
- 学习物体之间的 动态因果机制、物理交互关系
- 使用 扩散模型(continuous latent) 和 自回归 Transformer(discrete latent) 两类架构
(2)后训练阶段(Post-training)
- 面向具体任务(如抓取、避障、驾驶)进行定制微调
- 只需少量 “提示-视频对”(Prompt-Video Pair)数据
- 快速迁移到新环境/任务,成本远低于端到端训练
五、应用价值:为物理 AI 建立统一模型基座
✅ 智能体策略初始化
WFM 可以为 RL 策略模型提供初始状态,解决“冷启动”问题。
✅ 策略训练与评估
通过模拟世界进行大规模强化学习训练,规避现实采集成本与安全风险。
✅ 模型预测控制(MPC)
用于模拟不同动作下未来世界状态,增强路径规划与动作控制的鲁棒性。
✅ 可控合成数据生成
支持高保真渲染、多样性场景变化,大幅提升数据多样性与泛化能力。
六、前瞻展望:通用物理智能体的基石
NVIDIA Cosmos 是继 LLM 和 SLM(视觉大模型)之后,面向 物理世界建模 的里程碑式平台,未来潜在的应用方向包括:
- 通用机器人智能体
- 数字孪生城市/工厂建模
- 多智能体协同仿真
- 智能交通系统动态控制
- 虚拟物理实验室与 AI 教学平台


















 710
710

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











