







目录
1.2阈值类型——阈值二值化(threshold binary)
1.4阈值类型——阈值取零(threshold to zero)
1.5阈值类型——阈值反取零(threshold to zero inverted)
1.概念
1.1图像阈值(threshold)
阈值简单的来说就是图像分割的标尺,这个标尺是如何产生的,阈值的产生算法是什么,阈值类型?
1.2阈值类型——阈值二值化(threshold binary)
左下方的图表示图像像素点Src(x,y)值分布情况,蓝色水平线表示阈值

1.3 阈值类型——截断(truncate)
左下方的图表示图像像素点Src(x,y)值的分布情况,蓝色水平线表示阈值

1.4阈值类型——阈值取零(threshold to zero)
左下方的图表示图像像素点Src(x,y)值的分布情况,蓝色水平线表示阈值

1.5阈值类型——阈值反取零(threshold to zero inverted)
左下方的图表示图像像素点Src(x,y)值的分布情况,蓝色水平线表示阈值

2.线性滤波
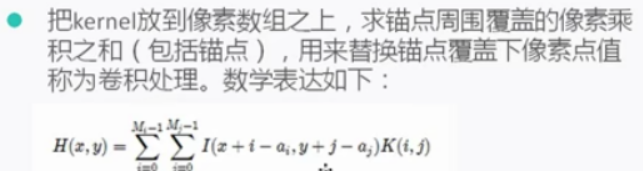
2.1卷积概念
- 卷积是图片处理中的一个操作,是kernel在图片的每个像素上的操作
- kernel本质上是一个固定大小的矩阵数组,其中心点称为锚点
2.1.1卷积的原理
卷积核也成为卷积算子,比较常见的算子有:

利用Robert算子分别从X和Y方向滤波结果如下:
void MyApi::linear_filter(Mat & image)
{
Mat x_dst;
//Robert X方向
Mat kerner_x = (Mat_<int>(2, 2) << 1, 0, 0, -1);
filter2D(image, x_dst, -1, kerner_x, Point(-1, -1), 0.0);
//Robert Y方向
Mat y_dst;
Mat kerner_y = (Mat_<int>(2, 2) << 0, 1, -1, 0);
filter2D(image, y_dst, -1, kerner_y, Point(-1, -1), 0.0);
namedWindow("Robert_x", WINDOW_FREERATIO);
imshow("Robert_x", x_dst);
namedWindow("Robert_y", WINDOW_FREERATIO);
imshow("Robert_y", y_dst);
} 我们可以看到在x和Y方向的梯度
我们可以看到在x和Y方向的梯度
Sobel算子:
void MyApi::linear_filter(Mat & image)
{
Mat x_dst;
//Robert X方向
Mat kerner_x = (Mat_<int>(2, 2) << 1, 0, 0, -1);
filter2D(image, x_dst, -1, kerner_x, Point(-1, -1), 0.0);
//Robert Y方向
Mat y_dst;
Mat kerner_y = (Mat_<int>(2, 2) << 0, 1, -1, 0);
filter2D(image, y_dst, -1, kerner_y, Point(-1, -1), 0.0);
//Sobel算子X方向
Mat sobel_x_dst;
Mat sobel_kerner_x = (Mat_<int>(3, 3) <<-1,0,1,-2,0,2,-1,0,1);
filter2D(image, sobel_x_dst, -1, sobel_kerner_x, Point(-1, -1), 0.0);
//Sobel算子Y方向
Mat sobel_y_dst;
Mat sobel_kerner_y = (Mat_<int>(3, 3) << -1, -2, -1, 0, 0, 0, 1, 2, 1);
filter2D(image, sobel_y_dst, -1, sobel_kerner_y, Point(-1, -1), 0.0);
namedWindow("Robert_x", WINDOW_FREERATIO);
imshow("Robert_x", x_dst);
namedWindow("Robert_y", WINDOW_FREERATIO);
imshow("Robert_y", y_dst);
namedWindow("Sobel_x", WINDOW_FREERATIO);
imshow("Sobel_x", sobel_x_dst);
namedWindow("Sobel_y", WINDOW_FREERATIO);
imshow("Sobel_y", sobel_y_dst);
}
Laplace算子类似操作就不写了。Laplace算子可以获取整个的轮廓结果
3.自定义卷积模糊
前面我们使用了常见的算子进行卷积,我们也可以自定义卷积:
filter2D方法filter2D(
Mat src,
Mat dst,
int depth//深度不知道就默认-1,
Mat kernel,
Point anchor,//锚点位置就默认Potin(-1,-1)
double delta//计算出来的像素+delta
)
其中kernel是可以自定义的卷积核
案例:自定义算子:完成模糊逐渐加深,每过0.5s就加深模糊一次,只有按ESC键才会结束
void MyApi::linear_filter(Mat & image)
{
//Mat x_dst;
Robert X方向
//Mat kerner_x = (Mat_<int>(2, 2) << 1, 0, 0, -1);
//filter2D(image, x_dst, -1, kerner_x, Point(-1, -1), 0.0);
Robert Y方向
//Mat y_dst;
//Mat kerner_y = (Mat_<int>(2, 2) << 0, 1, -1, 0);
//filter2D(image, y_dst, -1, kerner_y, Point(-1, -1), 0.0);
Sobel算子X方向
//Mat sobel_x_dst;
//Mat sobel_kerner_x = (Mat_<int>(3, 3) <<-1,0,1,-2,0,2,-1,0,1);
//filter2D(image, sobel_x_dst, -1, sobel_kerner_x, Point(-1, -1), 0.0);
Sobel算子Y方向
//Mat sobel_y_dst;
//Mat sobel_kerner_y = (Mat_<int>(3, 3) << -1, -2, -1, 0, 0, 0, 1, 2, 1);
//filter2D(image, sobel_y_dst, -1, sobel_kerner_y, Point(-1, -1), 0.0);
//namedWindow("Robert_x", WINDOW_FREERATIO);
//imshow("Robert_x", x_dst);
//namedWindow("Robert_y", WINDOW_FREERATIO);
//imshow("Robert_y", y_dst);
//namedWindow("Sobel_x", WINDOW_FREERATIO);
//imshow("Sobel_x", sobel_x_dst);
//namedWindow("Sobel_y", WINDOW_FREERATIO);
//imshow("Sobel_y", sobel_y_dst);
//自定义算子:完成模糊逐渐加深,每过0.5s就加深模糊一次
Mat dst;
int c = 0;
int index = 0;
int ksize = 0;
while (true)
{
c = waitKey(500);
if ((char)c == 27)//当按ESC键跳出
{
break;
}
ksize = 4 + (index % 5) * 2 + 1;
Mat kernel = Mat::ones(Size(ksize, ksize), CV_32F / (float)(ksize * ksize));
filter2D(image, dst, -1, kernel, Point(-1, -1));
index++;
namedWindow("自定义算子", WINDOW_FREERATIO);
imshow("自定义算子", dst);
}
}
















 4288
4288











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











