




 本文介绍了如何在QT环境中,使用C++调用海康工业相机SDK进行图像采集,并结合OpenCV处理图像,通过QT的Label组件显示采集到的图像。详细步骤包括设置QT工程的库路径、引用海康和OpenCV的库文件,以及创建相机类和显示图像的槽函数。提供相关工程文件的下载链接。
本文介绍了如何在QT环境中,使用C++调用海康工业相机SDK进行图像采集,并结合OpenCV处理图像,通过QT的Label组件显示采集到的图像。详细步骤包括设置QT工程的库路径、引用海康和OpenCV的库文件,以及创建相机类和显示图像的槽函数。提供相关工程文件的下载链接。
QT(C++)调用海康工业相机SDK采集图像的简单示例
简介
前一篇是用VS(C#)调用海康SDK采集图像,调用halcon库将采集到的图像进行转换,有时在测试相机时会涉及到halcon的license问题,比较麻烦,所以打算利用opencv图像库来转换图像,顺便用QT来实现图像的采集。
开发环境
Qt 5.4.0 (MSVC 2010, 32 bit)
QT Creator 3.3.0
OpenCV 2.4.9
引用海康的库文件
1.将海康安装目录\MVS\Development\下的Includes文件夹连同里面的文件一起复制到QT工程目录下。
2. 将海康安装目录\MVS\Development\Libraries\win64\下的MvCameraControl.lib文件复制到QT工程文件下的指定位置,例如刚刚复制到QT工程里面的Includes文件夹中(后面引用该库文件会设置在这个位置)。
3. 在QT的pro文件中添加以下代码:
LIBS += -L $ $PWD/Includes/ -lMvCameraControl
INCLUDEPATH += $ $ PWD/Includes
DEPENDPATH += $ $ PWD/Includes
4. 创建的相机类头文件中添加引用#include"Includes/MvCameraControl.h"
此外还需要引用OpenCV的库,具体方法请百度。
1.创建相机类
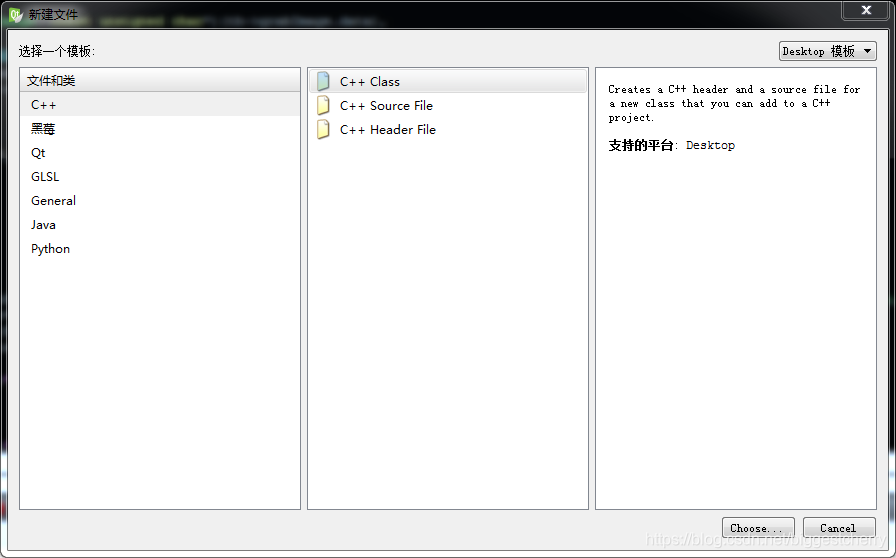
鼠标右键单击项目文件–添加新文件–选择“C++ Class”–单击右下角“Choose…”,输入类名称,例如Mycamera–下一步–完成。
头文件mycamera.h
#ifndef MYCAMERA_H
#define MYCAMERA_H
#include"Includes/MvCameraControl.h"
#include"iostream"
#include"opencv2/opencv.hpp"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
class Mycamera
{
public:
Mycamera();
~Mycamera();
//声明相关变量及函数等
static int EnumDevices(MV_CC_DEVICE_INFO_LIST* pstDevList);
// ch:连接相机
int connectCamera(string id);
//设置是否为触发模式
int setTriggerMode(unsigned int TriggerModeNum);
//开启相机采集
int startCamera();
//发送软触发
int softTrigger() 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









