






提到稚晖君,毫无疑问,在科技圈一直是顶流的存在。
大家都知道,2022年底稚晖君从华为离职后便投身于自己所热爱的机器人创业,并创立了智元机器人(Agibot)。
智元机器人是一家专注于发展通用人形机器人和具身智能的公司,致力于将AI和机器人深度融合,推动AGI机器人的实现和发展。
众所周知这两年AI爆火出圈,那所谓的AGI,指的则是通用人工智能(Artificial General Intelligence)。
跟普通的AI相比,中间多了一个G,也就是更加强调「通用」这个词的分量。而AGI的目标就是致力于研制像人一样思考,像人一样从事多种用途的机器,所以这听起来就是一件很酷的事情。
不得不说,创业确实是一件不易的事情。
貌似自从稚晖君投身机器人创业之后,忙得连B站基本都没时间来更新了。
不过就在前两天,稚晖君的B站动态突然更新了一波,并且这次一回来就带来了一项硬干货,那就是:
智元自主研发的高性能中间件 AimRT 正式宣布开源了!

关于这个AimRT中间件,其实在今年8月份的智元2024年度新品发布会上,稚晖君在现场就表示9月底将会进行开源。
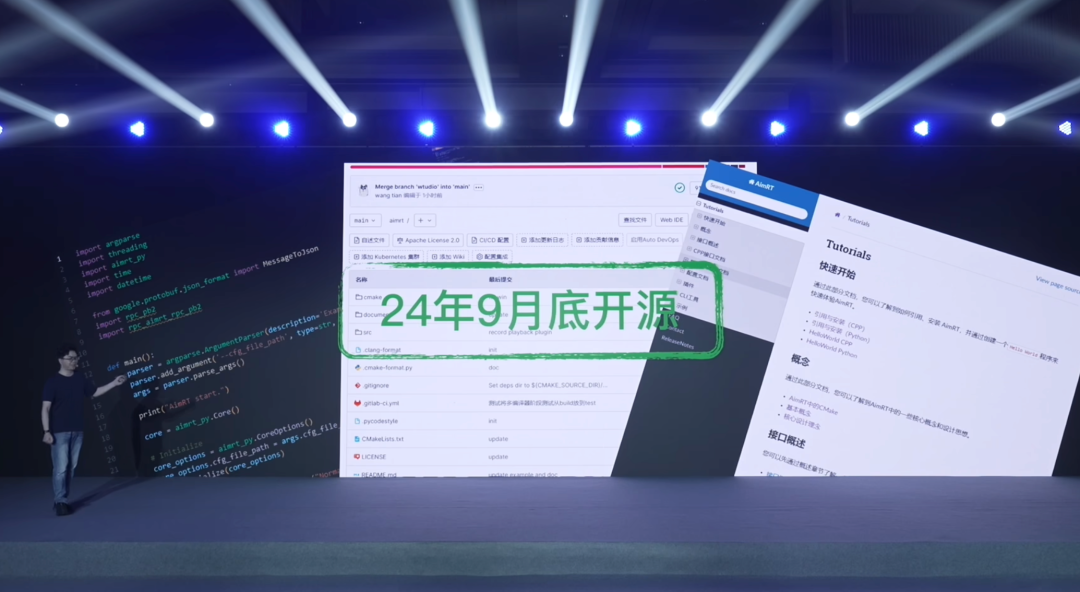
那现在,这个开源承诺如期兑现,智元的官网上也第一时间进行了官宣。
AimRT是一个面向现代机器人领域的运行时开发框架,轻量易部署,在资源管控、异步编程、部署配置等方面均具有更现代的设计。
AimRT的源码目前托管在包括Gitee和GitHub等多个开源社区,并且相关的文档已上线官方网站。
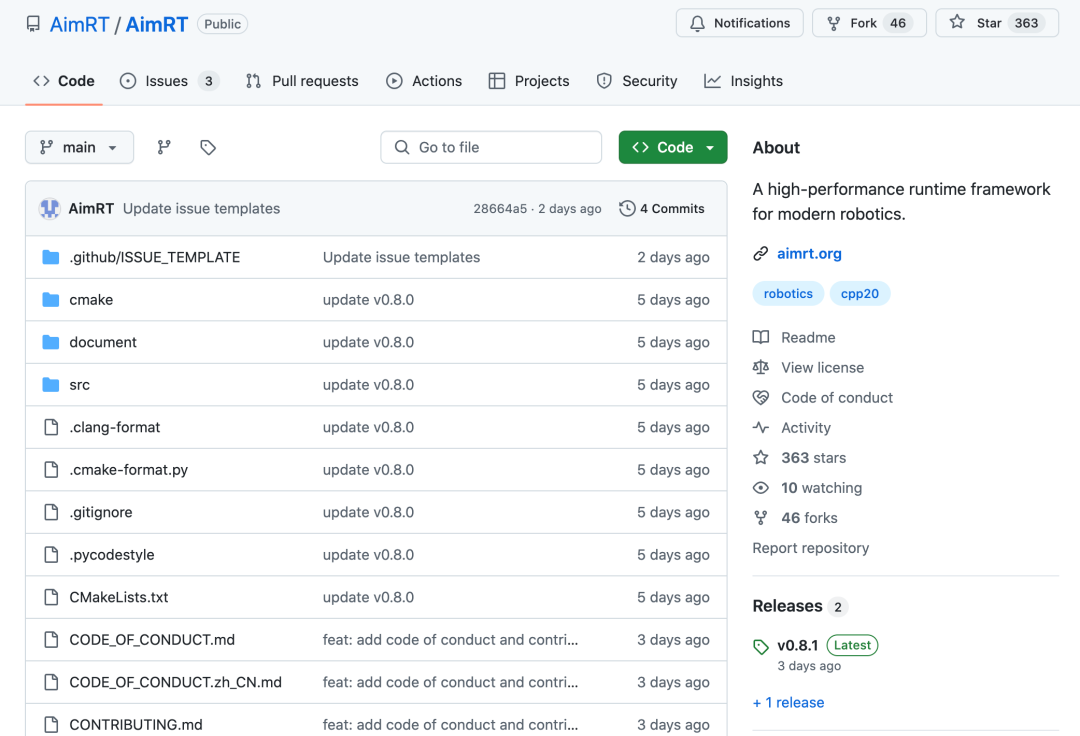
github.com/AimRT/AimRT
看了一下对应的GitHub仓库可以发现,AimRT的主要代码是基于C++开发的,
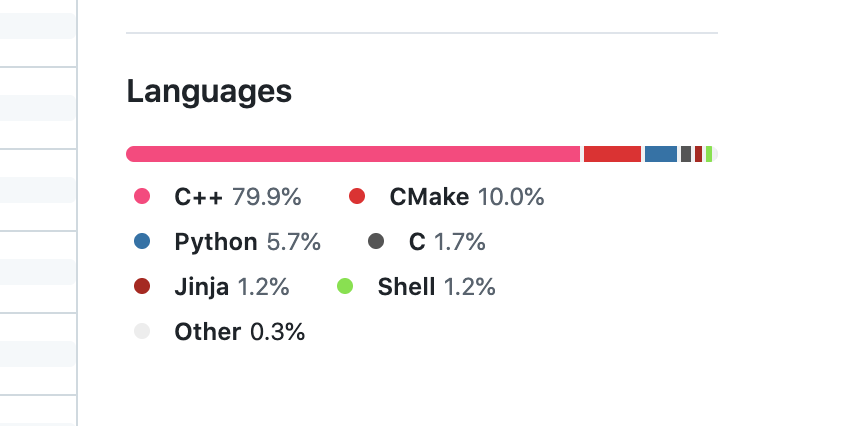
再看一下对应的项目代码目录,更是清晰明了,对于对机器人开发感兴趣的小伙伴们来说,可以说是妥妥滴福音了。
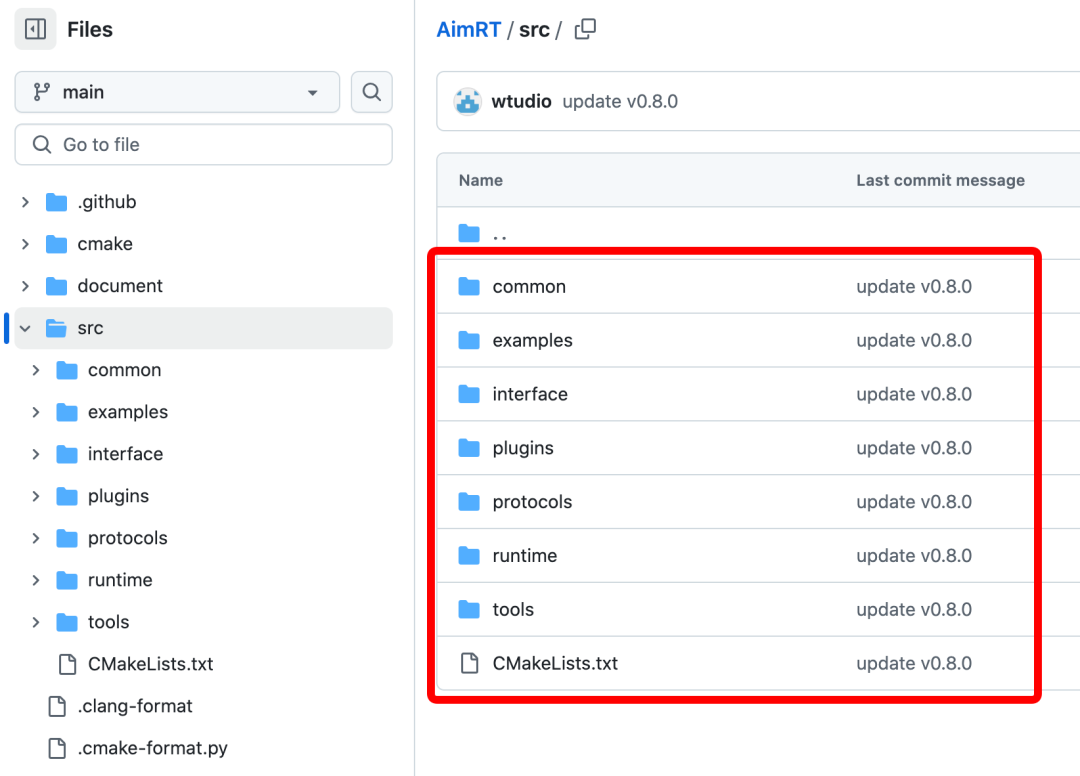
src
├── common --------------------------------- // 一些基础的、可以直接使用的通用组件,例如 string、log 接口、buffer 等
├── examples ------------------------------- // AimRT 官方示例
│ ├── cpp -------------------------------- // CPP 接口的示例
│ ├── py --------------------------------- // Python 接口的示例
│ └── plugins ---------------------------- // 一些各方插件的使用示例
├── interface ------------------------------ // AimRT 接口层
│ ├── aimrt_core_plugin_interface -------- // [CPP] 插件开发接口
│ ├── aimrt_module_c_interface ----------- // [C] 模块开发接口
│ ├── aimrt_module_cpp_interface --------- // [CPP] 模块开发接口,对 C 版本的封装
│ ├── aimrt_module_protobuf_interface ---- // [CPP] 与 protobuf 相关的模块开发接口,基于 CPP 版本接口
│ ├── aimrt_module_ros2_interface -------- // [CPP] 与 ROS2 相关的模块开发接口,基于 CPP 版本接口
│ ├── aimrt_pkg_c_interface -------------- // [C] Pkg 开发接口
│ └── aimrt_type_support_pkg_c_interface - // [C] Type support 包接口
├── plugins -------------------------------- // AimRT 官方插件
├── protocols ------------------------------ // 一些 AimRT 官方的标准协议
├── runtime -------------------------------- // AimRT 运行时
│ ├── core ------------------------------- // 运行时核心库
│ ├── main ------------------------------- // 基于 core 实现的一个主进程"aimrt_main"
│ └── python_runtime --------------------- // 基于 pybind11 封装的 python 版本运行时
└── tools ---------------------------------- // 一些配套工具↑↑可左右滑动查看
和传统框架相比,AimRT具备一系列优势特性。
轻量高效:基于现代C++新标准开发,轻量易部署,采用现代化设计模式,提升软件开发效率。
工具链完善:提供完善的调试、性能分析工具及良好的可观测性支持,保证系统稳定运行。
生态兼容:兼容ROS2、Http、Grpc等多种通信协议,支持渐进式升级存量系统,可广泛应用于不同部署场合。
高扩展性:提供全面的插件开发接口,支持二次开发,满足各种特殊场景需求。
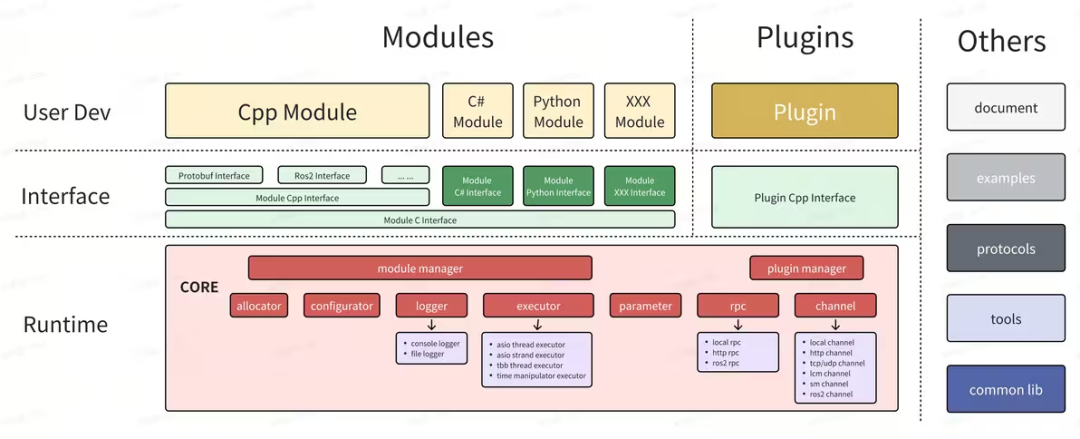
AimRT架构图
聊到AimRT诞生的背景,智元也在其官博里也作了说明。
在机器人中间件领域中,ROS 1和ROS 2曾长期占据主导地位,但是不论前者还是后者,其在机器人中间件领域均有一定程度的局限性,在产业落地方面仍面临着诸多挑战,尤其是在面对未来针对机器人与AI、机器人与云技术融合等场景,因此智元自主研发了这一套AimRT中间件。
AimRT是智元成立之初便开始自研的一套框架,在内部也经历了很长时间的使用和测试,所以现在开源出来,也是希望通过开源开放和生态共创,从而共同推进机器人的技术创新与发展。
聊到开源这件事,不管是稚晖君自己以前在B站频道的各种主、支线作品,还是现如今创业后的发布产品,其实大佬一直都有在致力于做这件事情。
在今年8月份的智元2024年度新品发布会上,共有5款机器人新品齐亮相。
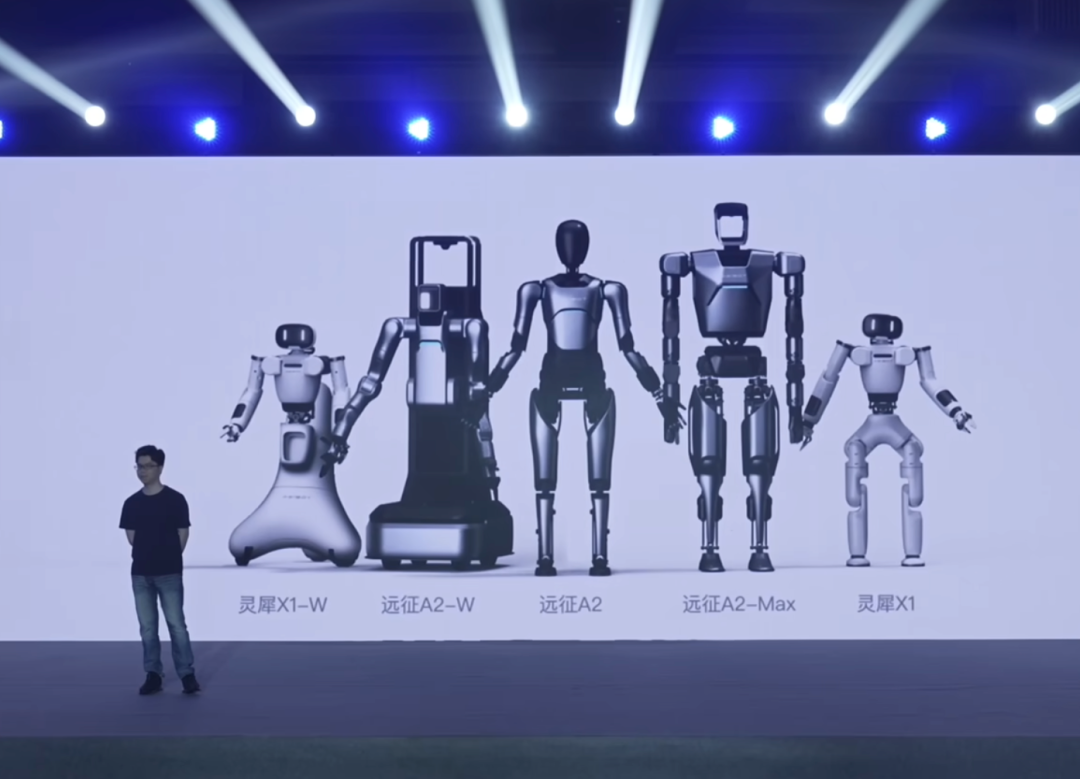
其中就包含一款全栈开源机器人:灵犀X1,其拥有模块化设计、高自由度以及高扩展性等诸多优势。
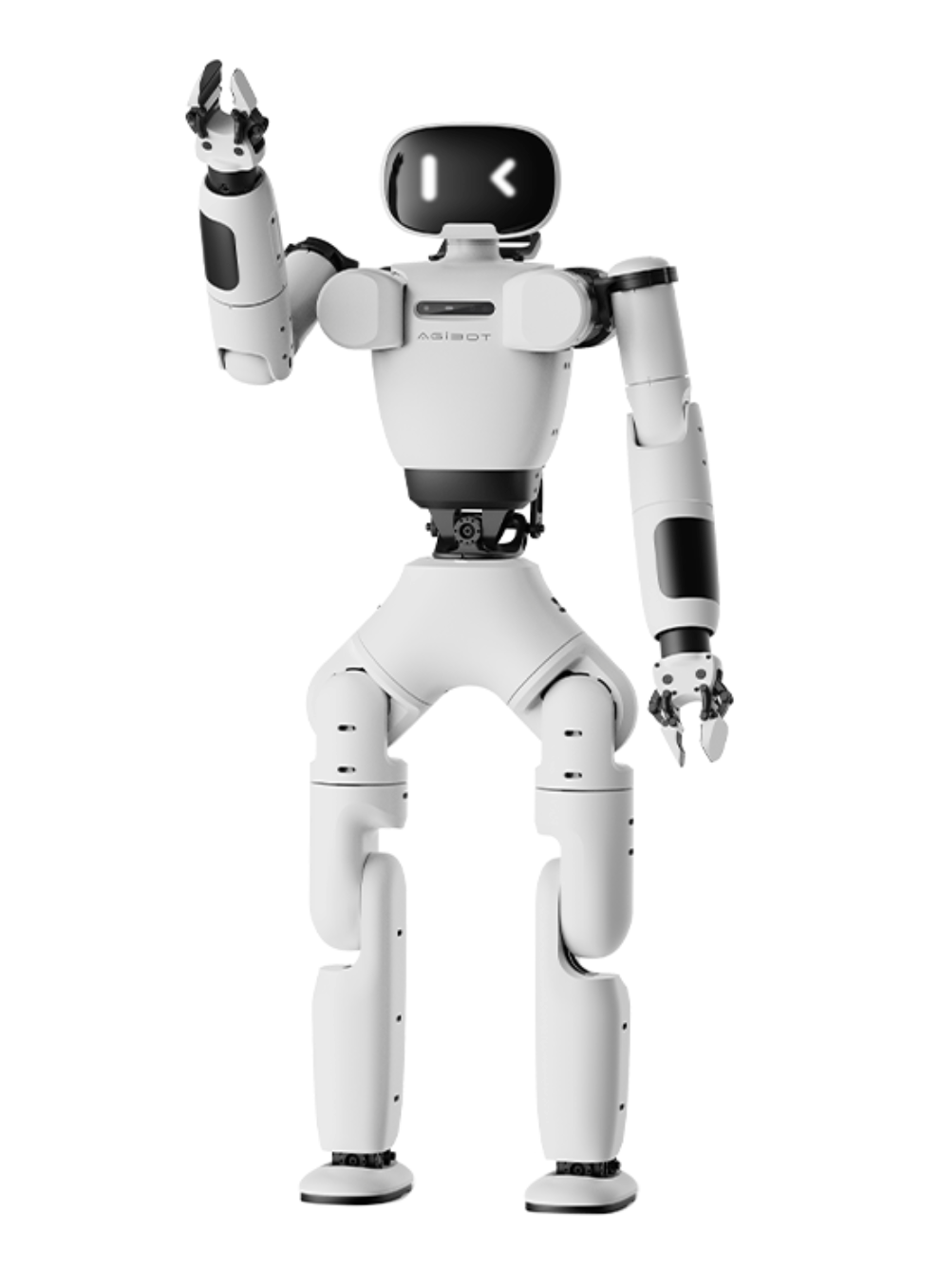
全栈开源机器人灵犀X1
另外据稚晖君透露,目前灵犀X1的开源资料也正在准备中,包括像本体设计图纸、软件框架、中间件源码以及基础运控算法等,大家也可以期待一下了。
那文章的最后也再次附上AimRT的GitHub开源地址:github.com/AimRT/AimRT,感兴趣的同学也可以上去研究一下对应的代码。
好了,那以上就是今天的内容分享了,感谢大家的阅读,我们下篇见。
< END >
为了帮助想要尝试做副业的朋友们,小灰撰写了一份电子小册,分享自己8年的自媒体经验,有兴趣的小伙伴欢迎扫码订阅:















 1916
1916

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









