







 超级会员免费看
超级会员免费看
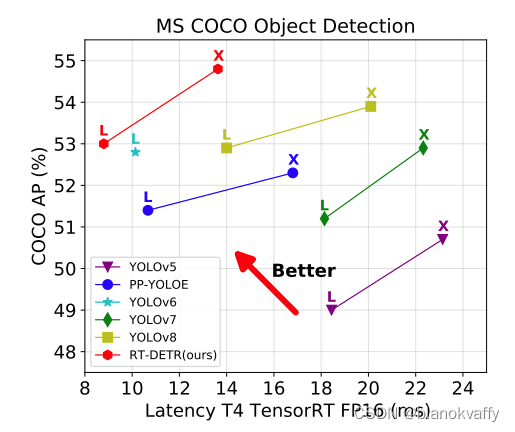
 本文介绍了如何通过简化DINO的encoder和引入IoU感知查询选择,将DETR模型优化到实时水平,提升了目标检测的效率和性能。研究分析了多尺度特征融合的计算冗余,并提出了新的encoder结构和查询选择策略,实现在COCO MAP上的性能提升。
本文介绍了如何通过简化DINO的encoder和引入IoU感知查询选择,将DETR模型优化到实时水平,提升了目标检测的效率和性能。研究分析了多尺度特征融合的计算冗余,并提出了新的encoder结构和查询选择策略,实现在COCO MAP上的性能提升。
DETRs Beat YOLOs on Real-time Object Detection
最近看到百度写的一篇还算不错的DETR论文,通过简化DINO的encoder层将模型加速到实时水平,翻译了下,以作记录。
论文地址:https://arxiv.org/pdf/2304.08069.pdf
开源地址:https://github.com/PaddlePaddle/PaddleDetection
模型结构
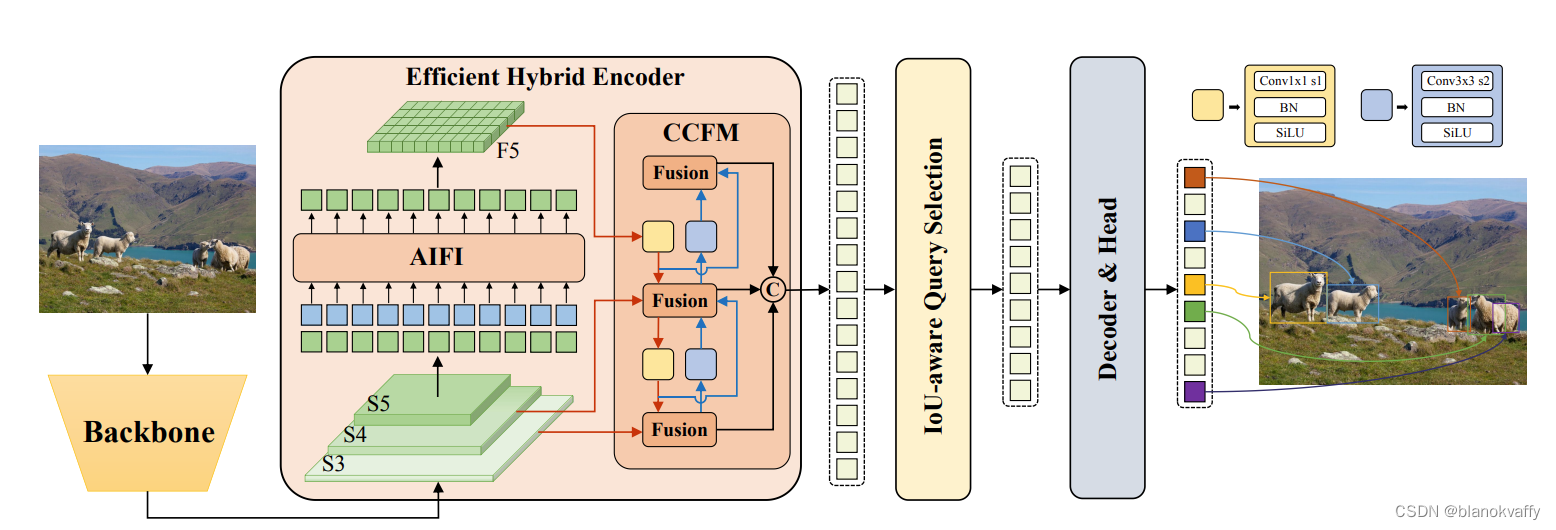
RT-Detr网络首先利用骨干网络{S3,S4,S5}的最后三个阶段的特征作为encoder的输入。encoder通过尺度内特征交互(AIFI,按文中的说法其实就是一个transformer layer)和跨尺度特征融合模块(CCFM)将多尺度特

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











