







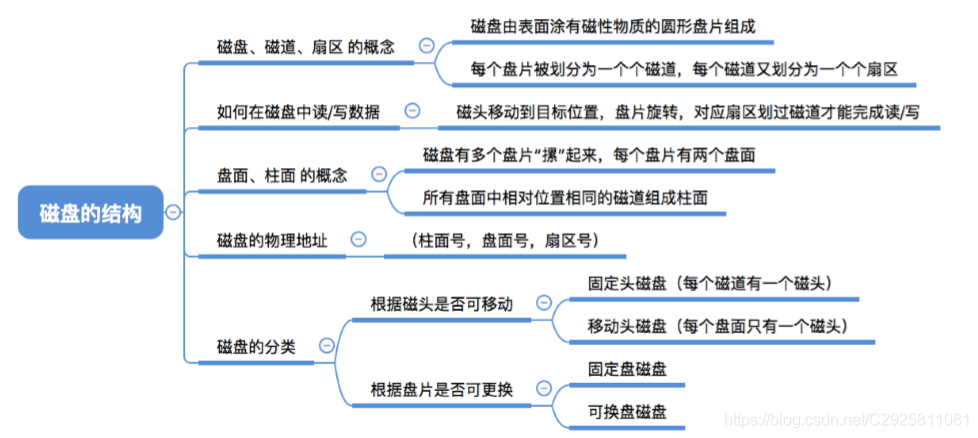
1 磁盘的结构
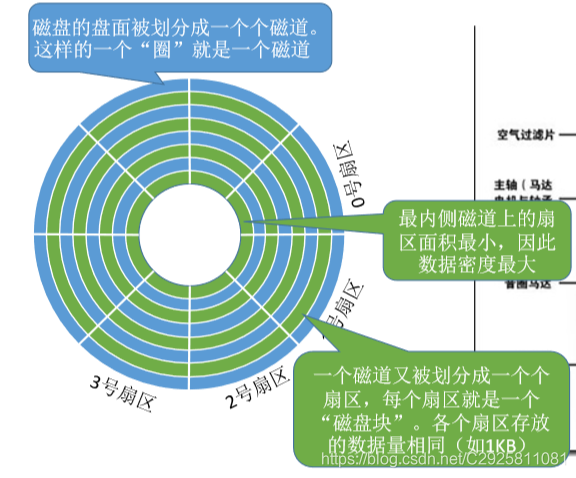
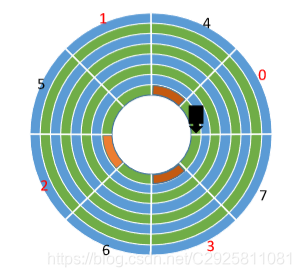
1.1 磁盘、磁道、扇区
磁盘的表面由一些磁性物质组成,可以用这些磁性物质来记录二进制数据
磁盘介绍:

1.2 磁盘如何读取数据
需要把“磁头”移动到想要读/写的扇区所在的磁道。磁盘会转起来,让目标扇区从磁头下面划过,才能完成对扇区的读/写操作。

1.4 盘面、柱面、磁盘的物理地址
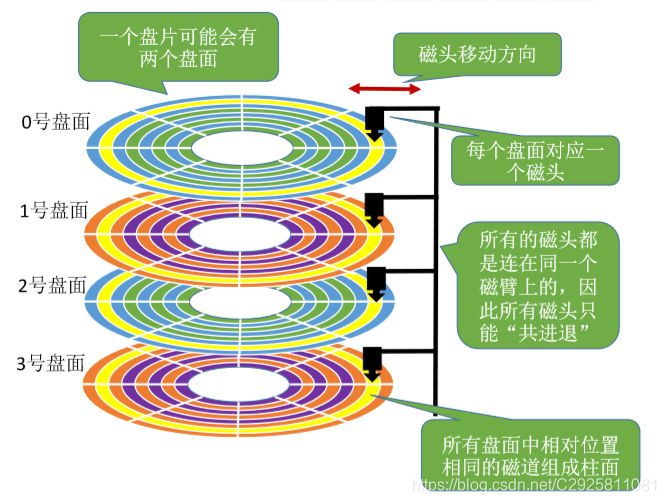
可用(柱面号,盘面号,扇区号)来定位任意一个“磁盘块”。在“文件的物理结构”小节中,我们经常提到文件数据存放在外存中的几号块,这个块号就可以转换成(柱面号,盘面号,扇区号)的地址形式。
可根据该地址读取一个“块”
- 根据“柱面号”移动磁臂,让磁头指向指定柱面;
- 激活指定盘面对应的磁头;
- 磁盘旋转的过程中,指定的扇区会从磁头下面划过,这样就完成了对指定扇区的读/写。
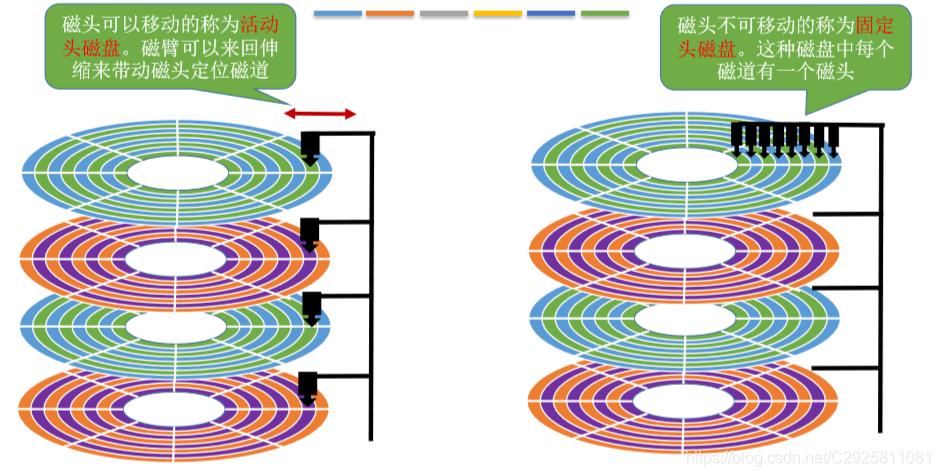
1.5 磁盘的分类
1.6 磁盘的结构小结
2 磁盘调度算法
2.1 一次磁盘读/写操作需要的时间
- 寻找时间(寻道时间)Ts:在读/写数据前,将磁头移动到指定磁道所花的时间。
①启动磁头臂是需要时间的。假设耗时为s;
②移动磁头也是需要时间的。假设磁头匀速移动,每跨越一个磁道耗时为m,总共需要跨越n条磁道。则:
寻道时间Ts=s+m*n
现在的硬盘移动一个磁道大约需要0.2ms,磁臂启动时间约为2ms
- 延迟时间TR:通过旋转磁盘,使磁头定位到目标扇区所需要的时间。设磁盘转速为
r(单位:转/秒,或转/分),则平均所需的延迟时间TR=(1/2)*(1/r)=1/2r
1/r就是转一圈需要的时间。找到目标扇区平均需要转半圈,因此再乘以1/2
硬盘的典型转速为5400转/分,或7200转/分,磁盘转速越高,延迟时间越小,读写速度越快
- 传输时间
T:从磁盘读出或向磁盘写入数据所经历的时间,假设磁盘转速为r,此次读/写的字节数为b,每个磁道上的字节数为N。则:
传输时间Tt=(1/r)*(b/N)=b/(rN)
每个磁道要可存
N字节的数据,因此b字节的数据需要b/N个磁道才能存储。而读/写一个磁道所需的时间刚好又是转一圈所需要的时间1/r
-
总的平均存取时间Tt=Ts+1/2r+b/(rN)
-
延迟时间和传输时间都与磁盘转速相关,且为线性相关。而转速是硬件的固有属性,因此操作系统也无法优化延迟时间和传输时间,但是操作系统的磁盘调度算法会直接影响寻道时间

2.2 先来先服务算法(FCFS)
算法思想:根据进程请求访问磁盘的先后顺序进行调度。
手动模拟:
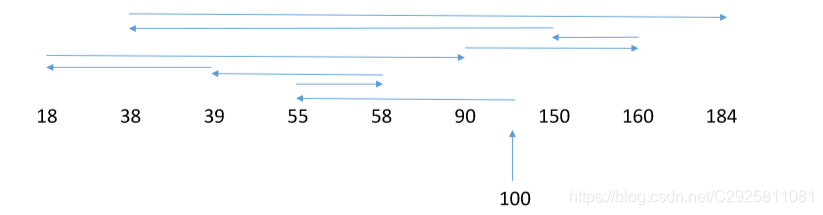
假设磁头的初始位置是100号磁道,有多个进程先后陆续地请求访问55、58、39、18、90、160、150、38、184号磁道
按照FCFS的规则,按照请求到达的顺序,磁头需要依次移动到55、58、39、18、90、160、150、38、184号磁道
磁头总共移动了(100-55)+(58-55)+19+21+72+70+10+112+146=498个磁道
响应一个请求平均需要移动498/9=55.3个磁道(平均寻找长度)
优缺点分析:
优点:公平;如果请求访问的磁道比较集中的话,算法性能还算过的去
缺点:如果有大量进程竞争使用磁盘,请求访问的磁道很分散,则FCFS在性能上很差,寻道时间长。
2.3 最短寻找时间优先(SSTF)
算法思想:SSTF算法会优先处理的磁道是与当前磁头最近的磁道。可以保证每次的寻道时间最短,但是并不能保证总的寻道时间最短。(其实就是贪心算法的思想,只是选择眼前最优,但是总体未必最优)
手动模拟:
假设磁头的初始位置是100号磁道,有多个进程先后陆续地请求访问55、58、39、18、90、160、150、38、184号磁道
磁头总共移动了(100-18)+(184-18)=248个磁道
响应一个请求平均需要移动248/9=27.5个磁道(平均寻找长度)

优缺点分析:
优点:性能较好,平均寻道时间短
缺点:可能产生“饥饿”现象
产生饥饿的原因在于:磁头在一个小区域内来回来去地移动
Eg:本例中,如果在处理18号磁道的访问请求时又来了一个38号磁道的访问请求,处理38号磁道的访问请求时又来了一个18号磁道的访问请求。如果有源源不断的18号、38号磁道的访问请求到来的话,150、160、184号磁道的访问请求就永远得不到满足,从而产生“饥饿”现象。
2.4 扫描算法(SCAN)
算法思想:SSTF算法会产生饥饿的原因在于:磁头有可能在一个小区域内来回来去地移动。为了防止这个问题,可以规定,只有磁头移动到最外侧磁道的时候才能往内移动,移动到最内侧磁道的时候才能往外移动。这就是扫描算法(SCAN)的思想。由于磁头移动的方式很像电梯,因此也叫电梯算法。
手动模拟:
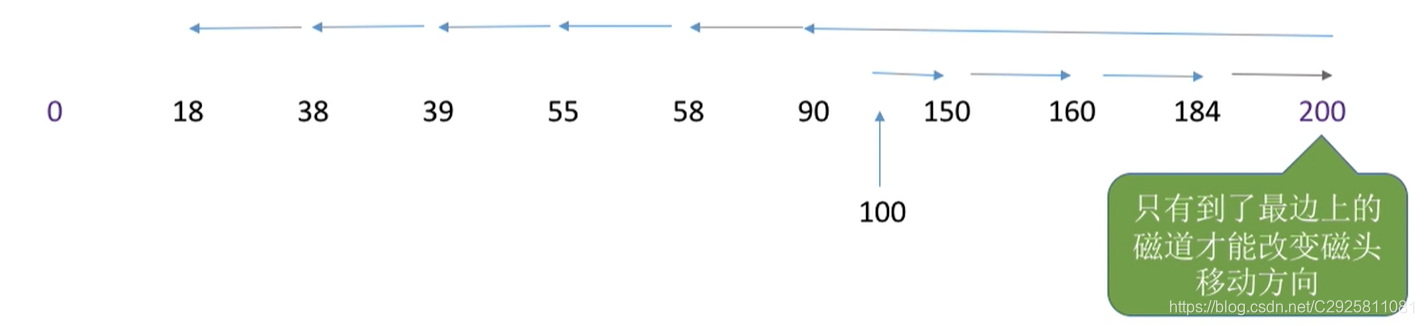
假设某磁盘的磁道为0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问55、58、39、18、90、160、150、38、184号磁道
磁头总共移动了(200-100)+(200-18)=282个磁道
响应一个请求平均需要移动282/9=31.3个磁道(平均寻找长度)
优缺点分析:
优点:性能较好,平均寻道时间较短,不会产生饥饿现象
缺点:
- 只有到达最边上的磁道时才能改变磁头移动万问,事实上,处理184号磁道的访问请求之后就不需要再往右移动磁头了。
SCAN算法对于各个位置磁道的响应频率不平均(如:假设此时磁头正在往右移动,且刚处理过90号磁道,那么下次处理90号磁道的请求就需要等磁头移动很长一段距离;而响应了184号磁道的请求之后,很快又可以再次响应184号磁道的请求了)
2.5 LOOK 调度算法
算法思想:扫描算法(SCAN)中,只有到达最边上的磁道时才能改变磁头移动方向,事实上,处理了184号磁道的访问请求之后就不需要再往右移动磁头了。LOOK调度算法就是为了解决这个问题,如果在磁头移动方向上已经没有别的请求,就可以立即改变磁头移动方向。(边移动边观察,因此叫LOOK)
手动模拟:
假设某磁盘的磁道为0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问55、58、39、18、90、160、150、38、184号磁道
磁头总共移动了(184-100)+(184-18)=250个磁道
响应一个请求平均需要移动250/9=27.5个磁道(平均寻找长度)

优缺点分析:
优点:比起SCAN算法来,不需要每次都移动到最外侧或最内侧才改变磁头万问,使寻道时间进一步缩短
2.6 循环扫描算法(C-SCAN)
算法思想:SCAN算法对于各个位置磁道的响应频率不平均,而C-SCAN算法就是为了解决这个问题。规定只有磁头朝某个特定方向移动时才处理磁道访问请求,而返回时直接快速移动至起始端而不处理任何请求。
手动模拟:
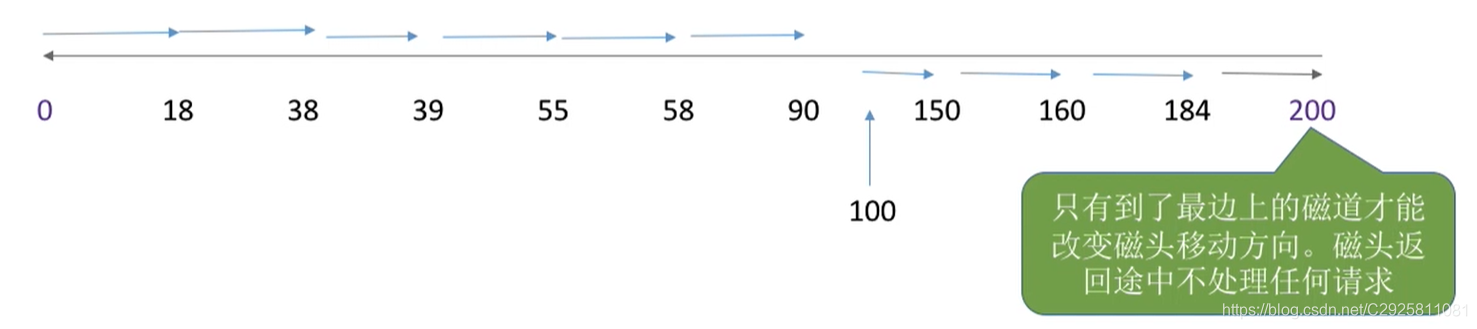
假设某磁盘的磁道为0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问55、58、39、18、90、160、150、38、184号磁道
磁头总共移动了(200-100)+(200-0)+(90-0)=390个磁道
响应一个请求平均需要移动390/9=43.3个磁道(平均寻找长度)
优缺点分析:
优点:比起
SCAN来,对于各个位置磁道的响应频率很平均。
缺点:只有到达最边上的磁道时才能改变磁头移动方向,事实上,处理了184号磁道的访问请求之后就不需要再往右移动磁头了;并且,磁头返回时其实只需要返回到18号磁道即可,不需要返回到最边缘的磁道。另外,比起SCAN算法来,平均寻道时间更长。
2.7 C-LOOK 调度算法
算法思想:C-SCAN算法的主要缺点是只有到达最边上的磁道时才能改变磁头移动方向,并且磁头返回时不一定需要返回到最边缘的磁道上。C-LOOK算法就是为了解决这个问题。如果磁头移动的方向上已经没有磁道访问请求了,就可以立即让磁头返回,并且磁头只需要返回到有磁道访问请求的位置即可。
手动模拟:
假设某磁盘的磁道为0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问55、58、39、18、90、160、150、38、184号磁道
磁头总共移动了(184-100)+(184-18)+(90-18)=322个磁道
响应一个请求平均需要移动322/9=35.8个磁道(平均寻找长度)

优缺点分析:
优点:比起
C-SCAN算法来,不需要每次都移动到最外侧或最内侧才改变磁头方向,使寻道时间进一步缩短
2.8 磁盘调度算法小结

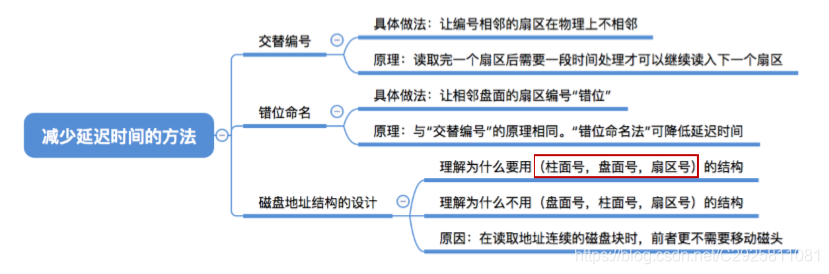
3 减少磁盘延迟时间的方法
问题:磁头读入一个扇区数据后需要一小段时间处理,如果逻辑上相邻的扇区在物理上也相邻,则读入几个连续的逻辑扇区,可能需要很长的“延迟时间”
简言之就是读完一个扇区,不能立刻读下一个,而磁盘在旋转,要读相邻的扇区,就是等这一转转完
3.1 交替编号
若采用交替编号的策略,即让逻辑上相邻的扇区在物理上有一定的间隔,可以使读取连续的逻辑扇区所需要的延迟时间更小。
思考:为什么?磁盘的物理地址是(柱面号,盘面号,扇区号)而不是(盘面号,柱面号,扇区号)
- (盘面号,柱面号,扇区号)读完本转区域再读相邻区域时,需要启动磁头臂,将磁头移动到下一个磁道;
- (柱面号,盘面号,扇区号)读完本转区域再读相邻区域时,由于柱面号/磁道号相同,只是盘面号不同,因此不需要移动磁头臂。只需要激活相邻盘面的磁头即可
答:读取地址连续的磁盘块时,采用(柱面号,盘面号,扇区号)的地址结构可以减少磁头移动消耗的时间
3.2 错位命名
- 未采用错位命名
- 采用错位命名


3.3 减少磁盘延迟方法小结
4 磁盘管理
4.1 磁盘初始化
- 进行低级格式化(物理格式化),将磁盘的各个磁道划分为扇区。一个扇区通常可分为头、数据区域(如
512B大小)、尾三个部分组成。管理扇区所需要的各种数据结构一般存放在头、尾两个部分,包括扇区校验码(如奇偶校验、CRC循环冗余校验码等,校验码用于校验扇区中的数据是否发生错误)- 将磁盘分区,每个分区由若干柱面组成(即分为我们熟悉的C盘、D盘、E盘)
- 进行逻辑格式化,创建文件系统。包括创建文件系统的根目录、初始化存储空间管理所用的数据结构(如位示图、空闲分区表)

4.2 引导快
计算机开机时需要进行一系列初始化的工作,这些初始化工作是通过执行初始化程序(自举程序)完成的
初始化程序可以放在ROM(只读存储器)中。
ROM中的数据在出厂时就写入了,并且以后不能再修改
ROM一般在出厂时就集成到了主板之上
以前的操作系统:计算机开机时,先读取ROM中程序并执行,完成初始化工作
初始化程序程序(自举程序)放在
ROM中存在什么问题?
万一需要更新自举程序,将会很不方便,因为ROM中的数据无法更改。如何解决呢?
现在的操作系统:ROM中只存放很小的“自举装入程序”,完整的自举程序放在磁盘的启动块(即引导块
/启动分区)上,启动块位于磁盘的固定位置。
拥有启动分区的磁盘称为启动磁盘或系统磁盘(C盘)
4.3 坏块的管理
坏了、无法正常使用的扇区就是“坏块”。这属于硬件故障,操作系统是无法修复的。应该将坏块标记出来,以免错误地使用到它
- 对于简单的磁盘,可以在逻辑格式化时(建立文件系统时)对整个磁盘进行坏块检查,标明哪些扇区是坏扇区,比如:在
FAT表上标明。(在这种方式中,坏块对操作系统不透明) - 对于复杂的磁盘,磁盘控制器(磁盘设备内部的一个硬件部件)会维护一个坏块链表。
在磁盘出厂前进行低级格式化(物理格式化)时就将坏块链进行初始化。
会保留一些“备用扇区”,用于替换坏块。这种方案称为扇区备用。且这种处理方式中,坏块对操作系统透明。
4.4 磁盘管理小结















 2239
2239











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









