






 本文探讨了MATLAB如何用于并联机器人Stewart平台的PID控制仿真,介绍了Stewart平台原理、PID控制算法,通过Simulink和Simscape进行模型建立,验证了PID控制的有效性和稳定性,为后续优化提供了基础。
本文探讨了MATLAB如何用于并联机器人Stewart平台的PID控制仿真,介绍了Stewart平台原理、PID控制算法,通过Simulink和Simscape进行模型建立,验证了PID控制的有效性和稳定性,为后续优化提供了基础。
MATLAB并联机器人Stewart平台pid控制仿真simulink simscape 运动学动力学
标题:MATLAB并联机器人Stewart平台的PID控制仿真研究
摘要:本文基于MATLAB平台,以并联机器人Stewart平台为研究对象,通过PID控制方法对该平台的运动进行仿真分析。首先介绍了Stewart平台的基本原理和结构特点,然后详细阐述了PID控制的基本原理和算法流程。接着,利用MATLAB的Simulink和Simscape工具进行建模与仿真,并通过实验验证了PID控制在Stewart平台运动控制中的有效性与稳定性。最后,对仿真结果进行了分析和总结,并展望了PID控制在并联机器人中的应用前景。
关键词:MATLAB,并联机器人,Stewart平台,PID控制,仿真,Simulink,Simscape,运动学,动力学
1. 引言
并联机器人作为一种新兴的机器人结构,在工业制造、航空航天领域等得到了广泛应用。而Stewart平台作为一种典型的并联机器人结构,其运动控制技术对于提高机器人的精度和稳定性起着重要作用。PID控制作为一种经典的控制算法,在工程领域也有着广泛的应用。本文基于MATLAB平台,以PID控制方法为研究重点,对Stewart平台的运动进行了仿真分析。
2. Stewart平台的原理与结构
Stewart平台是一种由六根电液伺服缸构成的六自由度并联机器人系统。该平台的原理是通过对六个电液伺服缸的伸缩控制,实现平台的运动控制。本节将介绍Stewart平台的结构特点和工作原理。
3. PID控制的基本原理与算法流程
PID控制作为一种经典的控制算法,其基本原理是根据当前误差、误差累积和误差变化率来调整控制器的输出,以实现对系统的稳定控制。本节将详细介绍PID控制的基本原理和算法流程,并分析其在Stewart平台控制中的应用场景。
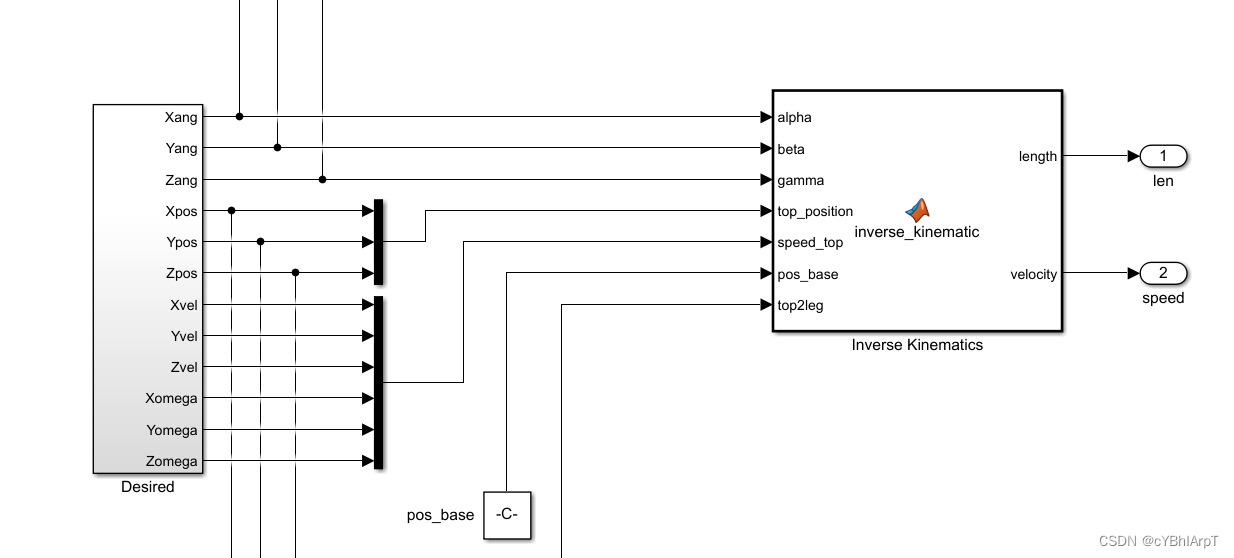
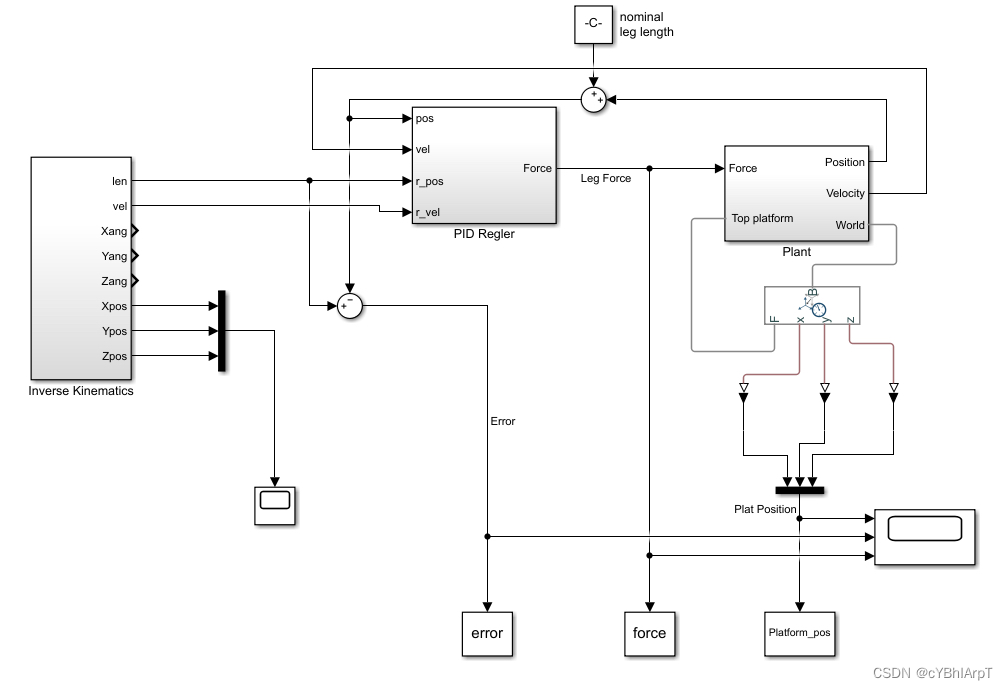
4. 基于Simulink和Simscape的建模与仿真
为了验证PID控制在Stewart平台运动控制中的有效性与稳定性,本文利用MATLAB的Simulink和Simscape工具对Stewart平台进行建模与仿真。通过设置合适的参数和控制策略,对Stewart平台的运动进行仿真分析,并对仿真结果进行了评估和分析。
5. 仿真结果与分析
本节将对基于Simulink和Simscape的Stewart平台仿真结果进行分析和总结。通过对比不同PID参数组合下的控制效果,评估PID控制在Stewart平台运动控制中的性能表现,并分析优化控制策略的可能性。
6. 结论与展望
本文通过对MATLAB平台下的并联机器人Stewart平台进行PID控制仿真研究,验证了PID控制在该平台运动控制中的有效性与稳定性。但是,本文的研究还有一些不足之处,例如仅考虑了理想的控制环境,未考虑外部干扰等因素。因此,后续的研究可以从这些方面展开,优化控制算法以及加入自适应控制等方法,进一步提高Stewart平台的运动控制性能。
相关代码,程序地址:http://lanzoup.cn/669186612236.html


















 2029
2029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









