






超声波原理
HC-SR04超声波测距模块:
工作电压电流:5V/15mA;
功能:约2cm-400cm的非接触式距离感测功能,测距精度可达高到3毫米;感知角度≤15°,被测物体面积不小于50cm²且平整;
模块:超声波发射器,接收器。
接口:供电VCC、触发信号输入Trig,回响信号输出Echo,地GND;
产品应用领域: 机器人避障 物体测距 液位检测 公共安防 停车场检测 。

基本工作原理:
(1)采用IO口TRIG触发测距,至少10us的高电平信号,即可发射超声波;
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
测试距离=(高电平时间*声速(340M/S))/ 2;
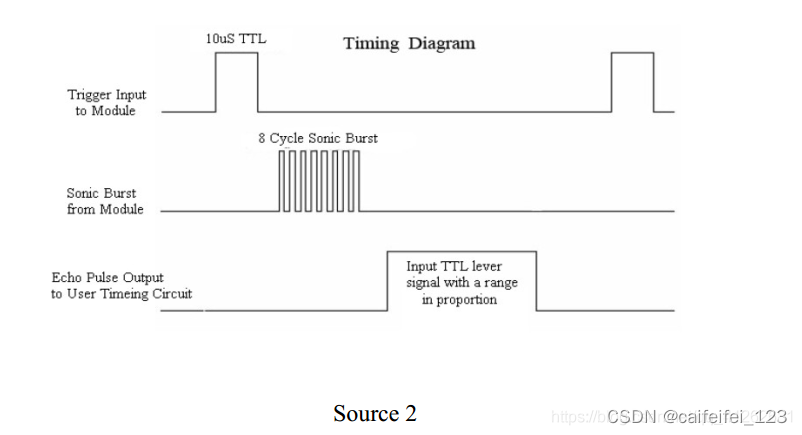
TRIG引脚负责发送超声波脉冲串。此引脚应设置为高电平10μs,此时HC-SR04将以40 kHZ发出8个周期的声波脉冲。发出声波爆发后,ECHO引脚将变为高电平。 ECHO引脚是数据引脚 - 用于进行距离测量。发送超声波脉冲串后, ECHO引脚将变为高电平,它将保持高电平,直到检测到超声波脉冲串为止,此时它将变为低电平。如此不断的周期测,即可以达到你移动测量的值
#include <wiringPi.h>
#include <stdio.h>
#include <sys/time.h>
#define Trig 28
#define Echo 29
void chaoshengboInit(void)
{
pinMode(Echo, INPUT);//检测波什么时候发什么时候回来设置端口为输入
pinMode(Trig, OUTPUT);//触发脉冲设置端口为输出
}
float disMeasure(void)//测距原理
{
struct timeval tv1;
struct timeval tv2;
long start, stop;
float dis;
digitalWrite(Trig, LOW);//先让脉冲处于低平稳
delayMicroseconds(2);
digitalWrite(Trig, HIGH);//再拉高
delayMicroseconds(10); //发出超声波脉冲
digitalWrite(Trig, LOW);//拉低至平稳
while ((digitalRead(Echo) != 1));
gettimeofday(&tv1, NULL); //获取当前时间,开始接收到返回信号的时候
while (!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL); //获取当前时间,最后接收到返回信号的时候
start = tv1.tv_sec * 1000000 + tv1.tv_usec; //微秒级的时间,开始发波的时间
stop = tv2.tv_sec * 1000000 + tv2.tv_usec;//波返回来的时间
dis = (float)(stop - start) / 1000000 * 34000 / 2; //计算时间差求出距离
return dis;
}
int main(void)
{
float dis;//用来存放测试的距离
if (wiringPiSetup() == -1) { //硬件端口初始化
printf("setup wiringPi failed !");
return -1;
}
chaoshengboInit();//调用超声波函数
while (1) {//不断地测距
dis = disMeasure();
printf("distance = %0.2f cm\n", dis);
delay(1000);
}
return 0;
}















 176
176











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









