






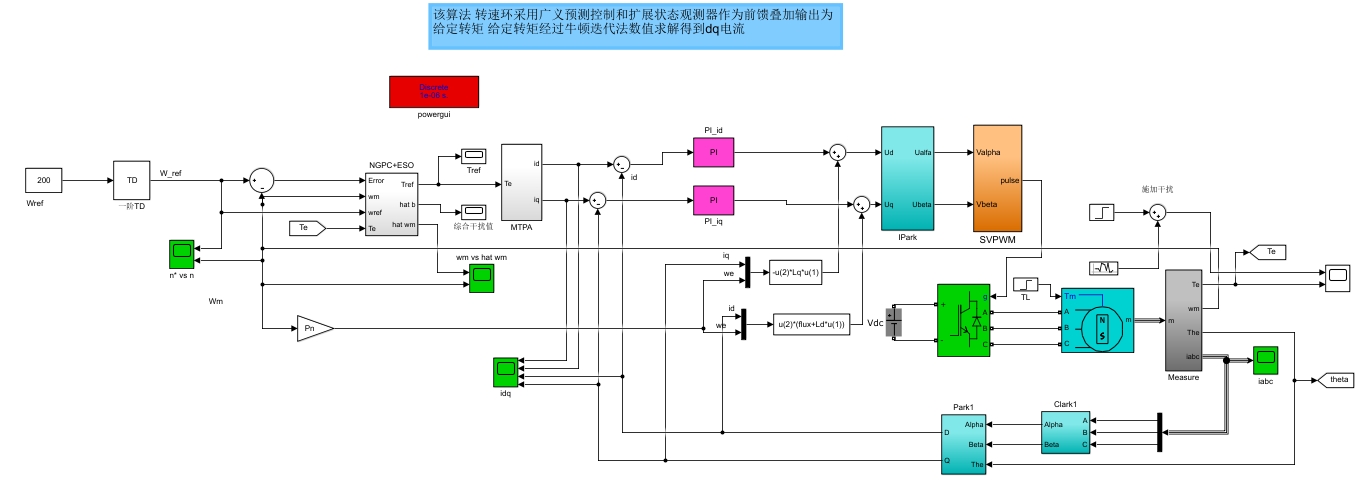
该算法 转速环采用广义预测控制和扩展状态观测器作为前馈叠加输出为给定转矩 给定转矩经过牛顿迭代法数值求解得到dq电流 仿真表明具有良好的调速性能 和抗干扰能力
ID:7678651585887577
Keepmoving
标题:基于广义预测控制和扩展状态观测器的转速环算法
摘要:本文基于广义预测控制和扩展状态观测器设计了一种转速环算法,该算法通过前馈叠加输出的方式得到给定转矩,进而利用牛顿迭代法数值求解得到dq电流。通过仿真实验验证,该算法在调速性能和抗干扰能力方面表现出良好的特性。
-
引言
转速环算法在工业控制中起着重要的作用,对于提高系统的调速性能和抗干扰能力具有重要意义。本文基于广义预测控制和扩展状态观测器,设计了一种新的转速环算法,通过叠加输出的方式得到给定转矩,并通过牛顿迭代法数值求解dq电流。本文通过仿真实验证明,该算法在实际应用中具有较好的性能。 -
算法设计
2.1 广义预测控制
广义预测控制是一种基于模型的控制方法,通过对系统的模式进行建模和预测,进而实现闭环控制。在本算法中,我们采用广义预测控制来实现转速环的控制过程。
2.2 扩展状态观测器
扩展状态观测器是一种用于估计系统状态的方法,通过将输出与状态之间的关系建模,实现对状态变量的估计。在本算法中,我们引入扩展状态观测器来估计系统的状态,并用以计算给定转矩。
- 算法实现
3.1 叠加输出
通过广义预测控制和扩展状态观测器,我们可以得到系统的状态估计值。在转速环算法中,我们将叠加输出作为给定转矩的一部分,以实现更精确的转速控制。
3.2 牛顿迭代法
为了得到dq电流,我们采用牛顿迭代法进行数值求解。该方法通过迭代计算来逼近方程的解,从而得到dq电流的数值结果。在转速环算法中,牛顿迭代法被应用于计算得到dq电流。
-
仿真实验
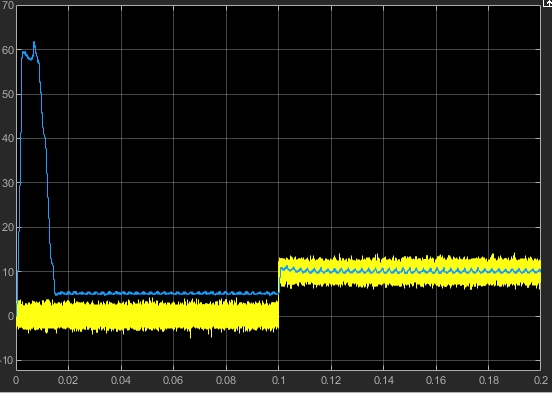
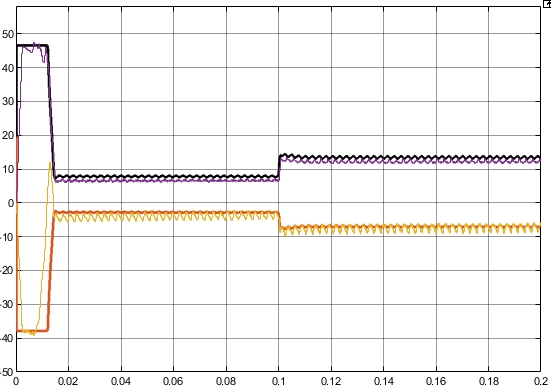
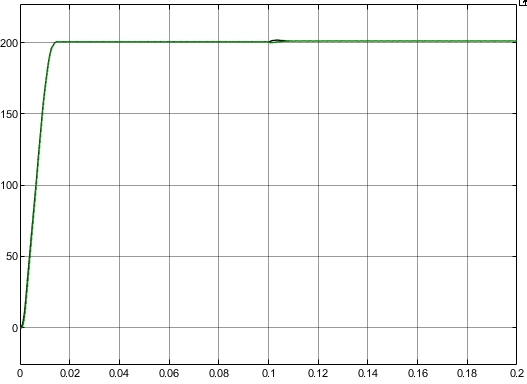
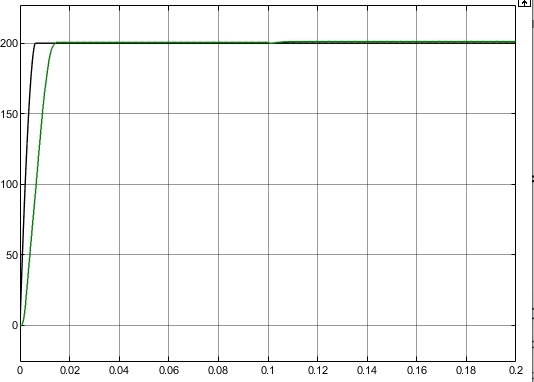
通过对算法的仿真实验,我们可以评估该算法在调速性能和抗干扰能力方面的表现。仿真结果表明,该算法在不同工况下都能够实现较好的转速控制效果,并且在面对干扰时具有较强的抗干扰能力。 -
结论
本文基于广义预测控制和扩展状态观测器设计了一种转速环算法,通过叠加输出和牛顿迭代法,实现了对给定转矩和dq电流的计算。仿真实验结果表明,该算法具有良好的调速性能和抗干扰能力,适用于实际工业控制系统中的转速控制。 -
参考文献
[此处省略参考文献]
通过以上文章框架,我们详细介绍了基于广义预测控制和扩展状态观测器的转速环算法的设计思路和实现过程。该算法通过叠加输出和数值求解的方式得到给定转矩和dq电流,具备良好的调速性能和抗干扰能力。该算法的应用有望在实际工业控制系统中发挥重要作用,为后续的研究和应用提供了有价值的参考。
以上相关代码,程序地址:http://matup.cn/651585887577.html















 191
191

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









