








从图中某一个顶点出发,访问图中的所有顶点,且使每个顶点被访问一次且仅被访问一次,称为图的遍历(搜索)。图的遍历方式主要有深度优先搜索和广度优先搜索两种。
1.图的深度优先搜索的概念
图的深度优先搜索遍历类似于树的先根遍历,是树的先根遍历的推广。
算法思想:假设初始状态是图中所有顶点未曾被访问,从图中某个顶点 v0 出发,访问顶点 v0 ,然后一次从 v0 的未被访问的邻接点出发深度优先遍历图,直至图中所有和 v0 有路径相通的顶点都被访问到;若此时图中还有顶点未被访问,呃另选图中一个未被访问的顶点作为起始点,重复执行上述过程,直到图中所有的顶点都被访问过。
图的深度优先搜索遍历过程如下所示,实箭头表示访问顶点的方向,虚箭头表示回溯,数字表示访问或回溯的次序。
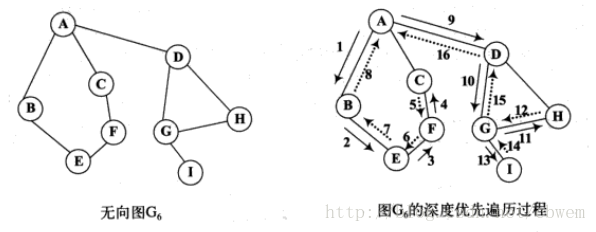
在图的深度优先搜索遍历过程中,图中可能存在回路,因此在访问某个顶点之后,沿着某条路径遍历,有可能又回到该顶点。为了避免再次访问已经访问过的顶点,需要设置一个数组visited[n],作为一个标志记录结点是否访问过,其初值为0,一旦某个顶点被访问,则其相应的分量被置为1。
2.图的深度优先搜索的实现
如果该图是一个无向连通图或者一个强连通图,则只需要调用一次DFS(G,v)就可以遍历整个图,否则需要多次调用DFS(G,v)。在遍历图时,对图中的每个顶点至多调用一次DFS(G,v)函数,因为一旦某个顶点被标志为已被访问,就不再从它出发进行搜索。因此遍历图的过程实质上是对每个顶点查找其邻接点的过程。其时间耗费取决于所采用的存储结构。当用二维数组表示邻接矩阵作为图时的存储结构时,查找每个顶点的邻接点所需时间为 O(n2) ,其中n为图中的顶点数。当以邻接表作为图的存储结构时,查找邻接点的时间为 O(e) ,其中,e为无向图边的顶点数目或有向图弧的数目。由此当以邻接表作为存储结构时,深度优先搜索遍历图的时间复杂度为 O(n+e) 。
- 非递归深度优先遍历算法
int DFSTraverse(AdjGraph G,int v)
/*图的非递归深度优先遍历*/
{
int i,visited[MaxSize],top;
ArcNode *stack[MaxSize],*p;
for(i=0;i<G.vexnum;i++) /*将所有顶点都添加未访问标志*/
visited[i]=0;
Visit(G.vertex[v].data); /*访问顶点v并将访问标志置为1,表示已经访问*/
visited[v]=1;
top=-1; /*初始化栈*/
p=G.vertex[v].firstarc; /*p指向顶点v的第一个邻接点*/
while(top>-1||p!=NULL)
{
while(p!=NULL)
if(visited[p->adjvex]==1)/*如果p指向的顶点已经访问过,则p指向下一个邻接点*/
p=p->nextarc;
else
{
Visit(G.vertex[p->adjvex].data); /*访问p指向的顶点*/
visited[p->adjvex]=1;
stack[++top]=p; /*保存p指向的顶点*/
p=G.vertex[p->adjvex].firstarc;/*p指向当前顶点的第一个邻接点*/
}
if(top>-1)
{
p=stack[top--]; /*如果当前顶点都已经被访问,则退栈*/
p=p->nextarc; /*p指向下一个邻接点*/
}
}
}
- 递归深度优先遍历算法
void DFSTraverse2(AdjGraph G)
/*从第1个顶点起,深度优先遍历图G*/
{
int v;
for(v=0;v<G.vexnum;v++)
visited[v]=0; /*访问标志数组初始化为未被访问*/
for(v=0;v<G.vexnum;v++)
if(!visited[v])
DFS2(G,v); /*对未访问的顶点v进行深度优先遍历*/
printf("\n");
}
void DFS2(AdjGraph G,int v)
/*从顶点v出发递归深度优先遍历图G*/
{
ArcNode *p;
visited[v]=1; /*访问标志设置为已访问*/
Visit(G.vertex[v].data); /*访问第v个顶点 */
p=G.vertex[v].firstarc; /*取v的边表头指针,p指向v的邻接点 */
while(p)
/*依次搜索v的邻接点 */
{
if(!visited[p->adjvex]) /*若v未被访问 */
DFS(G,p->adjvex); /*以v的邻接点纵深搜索 */
p=p->nextarc; /*找v的下一个邻接点*/
}
}3.图的广度优先搜索的概念
图的广度优先搜索遍历类似于树的层次遍历过程。
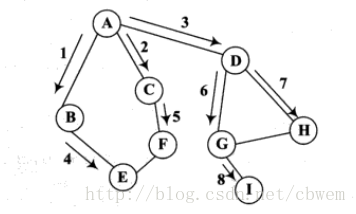
算法思想:从图的某个顶点v出发,在访问了v之后依次访问v的各个未曾访问过的邻接点,然后分别从这些邻接点出发依次访问他们的邻接点,并使“先被访问的顶点的邻接点”先于“后被访问的邻接点”被访问,直至图中所有一斤访问的顶点的邻接点都被访问到;若此时图中还有顶点未被访问,则另选图中一个未曾被访问的顶点作为起始点,重复上述过程,直至图中的所有顶点都被访问到为止。
4.图的广度优先搜索的实现
域深度优先搜索遍历类似,在图的广度优先搜索遍历过程中也需要一个访问标致数组visited[MaxSize],用来表示顶点是否被访问过。初始时,将图中的所有顶点的标志数组 visited[vi] 都初始化为0,表示顶点未被访问。从第一个顶点 v0 出发,访问该顶点并将标志数组置为1;然后将 v0 入队,当队列不为空时,将队头元素出队,依次访问该顶点的所有邻接点,同时将标志数组对应位置设为1,并将其邻接点依次入队。依此类推,直到图中所有顶点都已被访问过。
设图的顶点个数为n,边的数目为e,则采用邻接表实现图的广度优先遍历的时间复杂度为 O(n+e) 。图的深度优先遍历和广度优先遍历的结果并不是唯一的,这主要与图的存储结点的位置有关。
void BFSTraverse(AdjGraph G)
/*从第1个顶点出发,按非递归广度优先遍历图G*/
{
int v,u,w,front,rear;
ArcNode *p;
int queue[MaxSize]; /*定义一个队列Q*/
front=rear=-1; /*初始化队列Q*/
for(v=0;v<G.vexnum;v++) /*初始化标志位*/
visited[v]=0;
v=0;
visited[v]=1; /*设置访问标志为1,表示已经被访问过*/
Visit(G.vertex[v].data);
rear=(rear+1)%MaxSize;
queue[rear]=v; /*v入队列*/
while(front<rear) /*如果队列不空*/
{
front=(front+1)%MaxSize;
v=queue[front]; /*队头元素出队赋值给v*/
p=G.vertex[v].firstarc;
while(p!=NULL) /*遍历序号为v的所有邻接点*/
{
if(visited[p->adjvex]==0)/*如果该顶点未被访问过*/
{
visited[p->adjvex]=1;
Visit(G.vertex[p->adjvex].data);
rear=(rear+1)%MaxSize;
queue[rear]=p->adjvex;
}
p=p->nextarc; /*p指向下一个邻接点*/
}
}
}5.图的遍历算法源码
- 类型定义
/*图的邻接表*/
typedef char VertexType[4];
typedef char InfoPtr;
typedef int VRType;
#define MaxSize 50 /*最大顶点个数*/
typedef enum{DG,DN,UG,UN}GraphKind; /*图的类型:有向图、有向网、无向图和无向网*/
typedef struct ArcNode /*边结点的类型定义*/
{
int adjvex; /*弧指向的顶点的位置*/
InfoPtr *info; /*与弧相关的信息*/
struct ArcNode *nextarc; /*指示下一个与该顶点相邻接的顶点*/
}ArcNode;
typedef struct VNode /*头结点的类型定义*/
{
VertexType data; /*用于存储顶点*/
ArcNode *firstarc; /*指示第一个与该顶点邻接的顶点*/
}VNode,AdjList[MaxSize];
typedef struct /*图的类型定义*/
{
AdjList vertex;
int vexnum,arcnum; /*图的顶点数目与弧的数目*/
GraphKind kind; /*图的类型*/
}AdjGraph;- 函数文件
int visited[MaxSize]; /* 访问标志数组*/
int DFSTraverse(AdjGraph G,int v)
/*图的非递归深度优先遍历*/
{
int i,visited[MaxSize],top;
ArcNode *stack[MaxSize],*p;
for(i=0;i<G.vexnum;i++) /*将所有顶点都添加未访问标志*/
visited[i]=0;
Visit(G.vertex[v].data); /*访问顶点v并将访问标志置为1,表示已经访问*/
visited[v]=1;
top=-1; /*初始化栈*/
p=G.vertex[v].firstarc; /*p指向顶点v的第一个邻接点*/
while(top>-1||p!=NULL)
{
while(p!=NULL)
if(visited[p->adjvex]==1)/*如果p指向的顶点已经访问过,则p指向下一个邻接点*/
p=p->nextarc;
else
{
Visit(G.vertex[p->adjvex].data); /*访问p指向的顶点*/
visited[p->adjvex]=1;
stack[++top]=p; /*保存p指向的顶点*/
p=G.vertex[p->adjvex].firstarc;/*p指向当前顶点的第一个邻接点*/
}
if(top>-1)
{
p=stack[top--]; /*如果当前顶点都已经被访问,则退栈*/
p=p->nextarc; /*p指向下一个邻接点*/
}
}
}
void DFSTraverse2(AdjGraph G)
/*从第1个顶点起,深度优先遍历图G*/
{
int v;
for(v=0;v<G.vexnum;v++)
visited[v]=0; /*访问标志数组初始化为未被访问*/
for(v=0;v<G.vexnum;v++)
if(!visited[v])
DFS2(G,v); /*对未访问的顶点v进行深度优先遍历*/
printf("\n");
}
void DFS2(AdjGraph G,int v)
/*从顶点v出发递归深度优先遍历图G*/
{
ArcNode *p;
visited[v]=1; /*访问标志设置为已访问*/
Visit(G.vertex[v].data); /*访问第v个顶点 */
p=G.vertex[v].firstarc; /*取v的边表头指针,p指向v的邻接点 */
while(p)
/*依次搜索v的邻接点 */
{
if(!visited[p->adjvex]) /*若v未被访问 */
DFS2(G,p->adjvex); /*以v的邻接点纵深搜索 */
p=p->nextarc; /*找v的下一个邻接点*/
}
}
void BFSTraverse(AdjGraph G)
/*从第1个顶点出发,按广度优先非递归遍历图G*/
{
int v,u,w,front,rear;
ArcNode *p;
int queue[MaxSize]; /*定义一个队列Q*/
front=rear=-1; /*初始化队列Q*/
for(v=0;v<G.vexnum;v++) /*初始化标志位*/
visited[v]=0;
v=0;
visited[v]=1; /*设置访问标志为1,表示已经被访问过*/
Visit(G.vertex[v].data);
rear=(rear+1)%MaxSize;
queue[rear]=v; /*v入队列*/
while(front<rear) /*如果队列不空*/
{
front=(front+1)%MaxSize;
v=queue[front]; /*队头元素出队赋值给v*/
p=G.vertex[v].firstarc;
while(p!=NULL) /*遍历序号为v的所有邻接点*/
{
if(visited[p->adjvex]==0)/*如果该顶点未被访问过*/
{
visited[p->adjvex]=1;
Visit(G.vertex[p->adjvex].data);
rear=(rear+1)%MaxSize;
queue[rear]=p->adjvex;
}
p=p->nextarc; /*p指向下一个邻接点*/
}
}
}
int FirstAdjVertex(AdjGraph G,VertexType v)
/*返回顶点v的第一个邻接顶点的序号*/
{
ArcNode *p;
int v1;
v1=LocateVertex(G,v); /*v1为顶点v在图G中的序号*/
p=G.vertex[v1].firstarc;
if(p) /*如果顶点v的第一个邻接点存在,返回邻接点的序号,否则返回-1 */
return p->adjvex;
else
return -1;
}
int NextAdjVertex(AdjGraph G,VertexType v,VertexType w)
/*返回v的相对于w的下一个邻接顶点的序号*/
{
ArcNode *p,*next;
int v1,w1;
v1=LocateVertex(G,v); /*v1为顶点v在图G中的序号*/
w1=LocateVertex(G,w); /*w1为顶点w在图G中的序号*/
for(next=G.vertex[v1].firstarc;next;)
if(next->adjvex!=w1)
next=next->nextarc;
p=next; /*p指向顶点v的邻接顶点w的结点*/
if(!p||!p->nextarc) /*如果w不存在或w是最后一个邻接点,则返回-1*/
return -1;
else
return p->nextarc->adjvex; /*返回v的相对于w的下一个邻接点的序号*/
}
int LocateVertex(AdjGraph G,VertexType v)
/*返回图中顶点对应的位置*/
{
int i;
for(i=0;i<G.vexnum;i++)
if(strcmp(G.vertex[i].data,v)==0)
return i;
return -1;
}
void CreateGraph(AdjGraph *G)
/*采用邻接表存储结构,创建无向图G*/
{
int i,j,k;
VertexType v1,v2; /*定义两个顶点v1和v2*/
ArcNode *p;
printf("请输入图的顶点数,边数(逗号分隔): ");
scanf("%d,%d",&(*G).vexnum,&(*G).arcnum);
printf("请输入%d个顶点的值:\n",G->vexnum);
for(i=0;i<G->vexnum;i++) /*将顶点存储在头结点中*/
{
scanf("%s",G->vertex[i].data);
G->vertex[i].firstarc=NULL; /*将相关联的顶点置为空*/
}
printf("请输入弧尾和弧头(以空格作为间隔):\n");
for(k=0;k<G->arcnum;k++) /*建立边链表*/
{
scanf("%s%s",v1,v2);
i=LocateVertex(*G,v1);
j=LocateVertex(*G,v2);
/*j为弧头i为弧尾创建邻接表*/
p=(ArcNode*)malloc(sizeof(ArcNode));
p->adjvex=j;
p->info=NULL;
p->nextarc=G->vertex[i].firstarc;
G->vertex[i].firstarc=p;
/*i为弧头j为弧尾创建邻接表*/
p=(ArcNode*)malloc(sizeof(ArcNode));
p->adjvex=i;
p->info=NULL;
p->nextarc=G->vertex[j].firstarc;
G->vertex[j].firstarc=p;
}
(*G).kind=UG;
}
void DestroyGraph(AdjGraph *G)
/*销毁无向图G*/
{
int i;
ArcNode *p,*q;
for(i=0;i<(*G).vexnum;++i) /*释放图中的边表结点*/
{
p=G->vertex[i].firstarc; /*p指向边表的第一个结点*/
if(p!=NULL) /*如果边表不为空,则释放边表的结点*/
{
q=p->nextarc;
free(p);
p=q;
}
}
(*G).vexnum=0; /*将顶点数置为0*/
(*G).arcnum=0; /*将边的数目置为0*/
}
void Visit(VertexType v)
{
printf("%s ",v);
}- 主程序
#include<stdlib.h>
#include<stdio.h>
#include<malloc.h>
#include<string.h>
void main()
{
AdjGraph G;
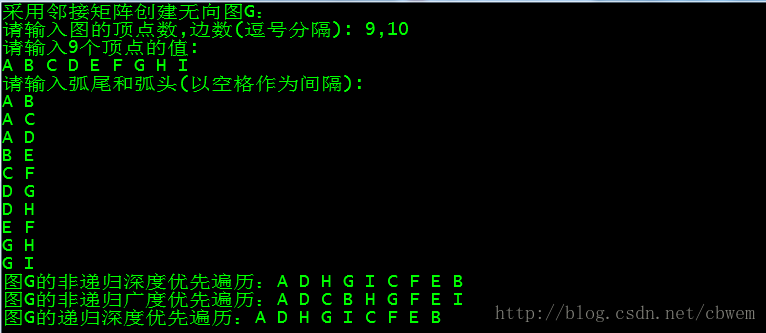
printf("采用邻接矩阵创建无向图G:\n");
CreateGraph(&G);
printf("图G的非递归深度优先遍历:");
DFSTraverse(G,0);
printf("\n");
printf("图G的非递归广度优先遍历:");
BFSTraverse(G);
printf("\n");
printf("图G的递归深度优先遍历:");
DFSTraverse2(G);
printf("\n");
DestroyGraph(&G);
}- 测试结果















 1126
1126

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









