







文章系列
SPI介绍
SPI由Motorola开发,是一种全双工的同步串口通信协议,适用于短距离通信,有四种工作模式,速率低可达12Mhz,高可达100Mhz。
硬件连接
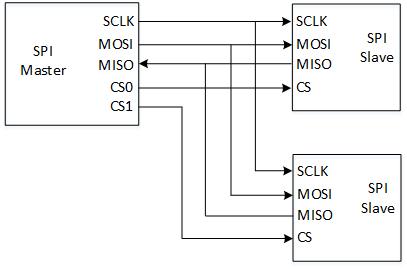
SCLK : 时钟线 (主控制器输出).
MOSI : 主输出,从输入,Master Output, Slave Input (output from master).
MISO : 主输入,从输出,Master Input, Slave Output (output from slave).
CS : 片选信号线 (output from master).
工作模式
| SPI MODE | CPOL(Clock Polarity) | CPHA(Clock Phase) |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 1 | 0 |
| 3 | 1 | 1 |
- CPOL=0,时钟初始值为0,活动状态为1,空闲状态为0:
CPHA=0,时钟上升沿数据捕获,时钟下降沿数据输出
CPHA=1,时钟下降沿数据捕获,时钟上升沿数据输出
- CPOL=1,时钟初始值为1,活动状态为0,空闲状态为1:
CPHA=0,时钟下降沿数据捕获,时钟上升沿数据输出
CPHA=1,时钟上升沿数据捕获,时钟下降沿数据输出















 4620
4620

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









