







1.图的定义
图的定义:图G由顶点集V和边集E组成,记为G =(V,E),其中V(G)表示图G中顶点的有限非空集,E(G)表示图G中顶尖之间的关系(边)集合,|V|表示图中顶点的个数,也称为图的阶,|E|表示图中边的条数。
简单图:不存在重复边;不存在顶点到自身的边;
完全图:无向图:边数 = n(n-1)/2
有向图:边数 = n(n-1)
强连通图:从顶点v到顶点w有路径和从顶点w到顶点v有路径,则顶点v和顶点w是强连通的。若 任意一对结点都是强连通的,则称此图为强连通图。
稀疏图:|E| < |V| log |V|
简单路径:顶点不重复出现的路径称为简单路径。
简单回路:除第一个顶点和最后一个顶点外,其余顶点不重复出现的回路称为简单回路。
2.图的实现(包括邻接矩阵和邻接表)和基本操作
(1)邻接矩阵:
所谓邻接矩阵存储,是指用一个一位数组存储图中顶点的信息,用一个二维数组存储图中边的信息,存储顶点之间邻接关系的二维数组称为邻接矩阵。
A[i][j] = 1表示从顶点i到顶点j有边。
特点:
①无线图的邻接矩阵是对称矩阵,因此在存储邻接矩阵时只需存储上(或下)三角矩阵的元素。
②第i行非零元素的个数表示第i个结点的出度;第j列非零元素的个数表示第j个结点的入度。
③稠密图适合用邻接矩阵存储
④设图G的邻接矩阵为A,An的元素An[i][j]表示从顶点i到顶点j的长度为n的路径的数目。
⑤空间复杂度为O(n2)
(2)邻接表法
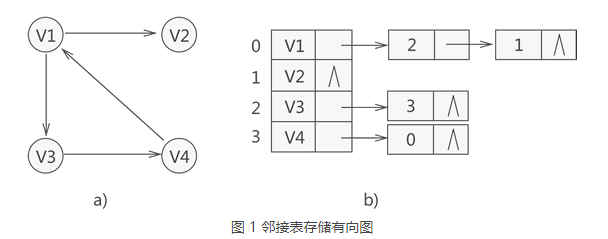
特点:
①若G为无向图,则所需的存储空间为O(|V|+2|E|)。
若G为有向图,则所需的存储空间为O(|V|+|E|)。
②对于稀疏图,采用邻接表法可以极大的节省存储空间。
③对于一个有向图,求一个顶点的出度只需要计算其邻接表中的结点个数;但求其入度则需要遍历全部邻接表。
④图的邻接表表示法不唯一。
3.图的两种遍历
(1)深度优先遍历
借助栈
伪代码如下:
1 bool visited[MAX_VERTEX_NUM]
2 void DFSTraverse(Graph G){
3 for(v=0; v<G.vernum; ++v){ //访问标记数组初始化
4 visited[v] = FALSE;
5 }
6 for(v=0; v<G.vexnum; ++v){ //从0号开始遍历
7 if(!visited[v]){
8 DFS(G,v);
9 }
10 }
11 }
12 void DFS(Graph G, int v){ //从顶点v出发,广度优先遍历图
13 visit(v);
14 visited[v] = TRUE;
15 for(w=FirstNeighbor(G,v); w>=0; w=NextNeighbor(G,v,w)){
16 if(!visited[w]){
17 DFS(G,w);
18 }//if
19 }//for
20 }
空间复杂度:O(|V|)
邻接矩阵的时间复杂度:O(|V|2)
邻接表的时间复杂度:O(|V|+|E|)
(2)广度优先遍历
借助一个辅助队列
伪代码如下:
1 bool visited[MAX_VERTEX_NUM]
2 void BFSTraverse(Graph G){
3 for(i=0; i<G.vernum; ++i){ //访问标记数组初始化
4 visited[i] = FALSE;
5 }
6 InitQueue(Q);
7 for(i=0; i<G.vexnum; ++i){ //从0号开始遍历
8 if(!visited[i]){
9 BFS(G,i);
10 }
11 }
12 }
13 void BFS(Graph G, int v){ //从顶点v出发,广度优先遍历图
14 visit(v);
15 visited[v] = TRUE;
16 EnQueue(Q,v);
17 while(!isEmpty(Q)){
18 DeQueue(Q,v);
19 for(w=FirstNeighbor(G,v); w>=0; w=NextNeighbor(G,v,w)){
20 if(!visited[w]){
21 visit(w);
22 visited[w] = TRUE;
23 EnQueue(Q,w);
24 }//if
25 }//for
26 }//while
27 }
采用邻接矩阵存储:时间复杂度O(|V|2),空间复杂度O(|V|)。
采用邻接表存储:时间复杂度O(|V|+|E|),空间复杂度O(|V|)。
4.图的基本应用,包括最小支撑树、最短路径、拓扑排序和关键路径。
(1)最小支撑树(也称为最小生成树MST)
性质:
最小支撑树不是唯一的,即最小生成树的树形不唯一。若图G中各边权值均不相同,则最小生成树唯一。
最小生成树的权值之和是唯一的。
最小生成树的顶点数 = 边数 + 1
Prim算法与Kruskal算法均是基于贪心算法。
①Prim算法
思路:从一个顶点出发,一直沿着这个子图扩张,直到构造出最小生成树。
时间复杂度:O(|V|2),适用于边稠密的图的最小生成树。
②Kruskal
思路:按边的权值递减排序,每次找出未连通的权值最小的边加入其中。
时间复杂度:O(|E|+log|E|),适用于边稀疏而顶点较多的图
(2)最短路径
单元最短路径:Dijkstra算法,求图中某一个顶点到其他顶点的最短路径。
最短路径:Floyd算法,求每对顶点间的最短路径。
①Dijkstra算法求单元最短路径问题
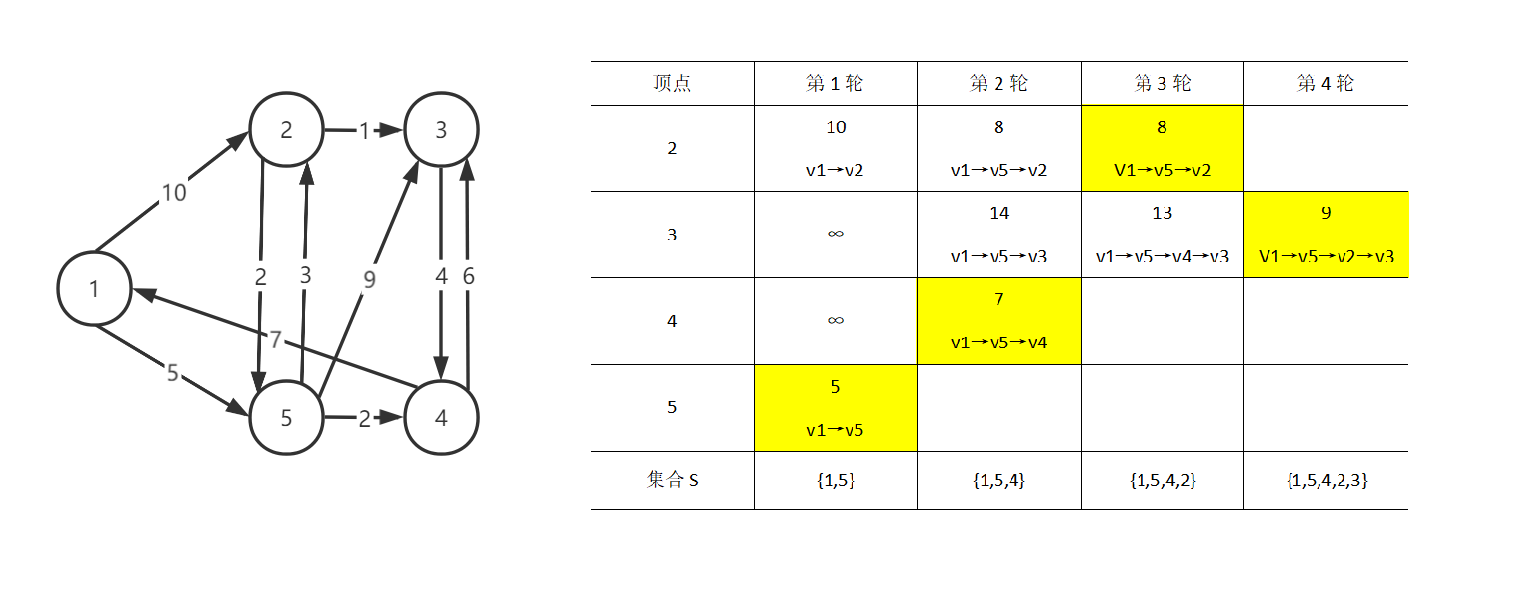
时间复杂度:O(|V|2)
特点:不允许有负值的权值。
②Floyd算法求各顶点之间的最短路径问题
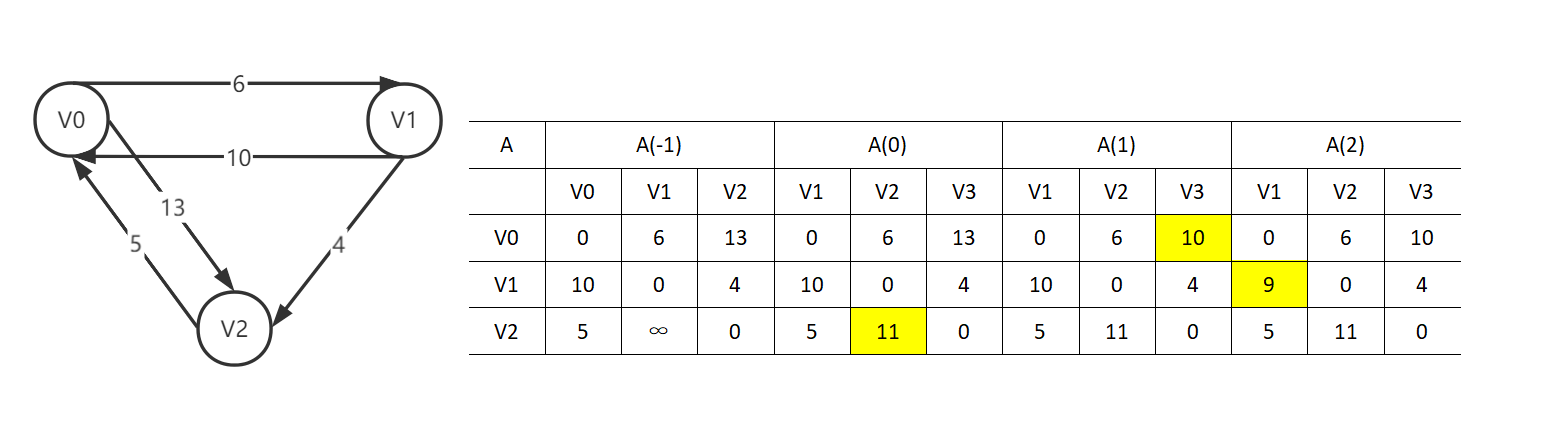
思路:
(1)初始化方阵
(2)将V0作为中间顶点更新方阵
(3)将V1作为中间结点更新方阵
(4)将V2作为中间节点更新方阵
时间复杂度:O(|V|3)
特点:允许有负值的权值,但是不允许有负值的权值构成的回路。
(3)拓扑排序
DAG图:有向无环图
AOV网:若用DAG图表示一个工程,其顶点表示活动,用有向边<Vi,Vj>表示活动Vi必须优先于活动Vj进行的一种关系,则将这种有向图称为顶点表示活动的网络,记为AOV网
拓扑排序:由一个有向无环图的顶点组成的序列。
条件:每个顶点只出现一次;若顶点A在序列中排在顶点B的前面,则不存在从B到A的路径。
算法:每次选择一个没有前驱的结点输出,删除该顶点和所有以它为结点的有向边,重复此过程,知道输出所有的顶点。
时间复杂度:O(|V|+|E|)
(4)关键路径
AOE网:在带权有向图中,以顶点表示事件,以有向边表示活动,以边上的权值表示完成该活动所需要的开销,简称AOE网。
性质:
只有在某顶点所代表的事件发生后,从该顶点出发的各有向边所代表的活动才能开始。
只有在进入某顶点的各有向边所代表的活动都已结束时,该顶点所代表的事件才能发生。
参考量的定义:ve(k):事件vk最早发生时间;
vl(k):事件vk最晚发生时间;
e(i):活动a(i)最早开始时间;
l(i):活动a(i)最晚开始的时间;
d(i)=l(i)-e(i):活动最早开始时间和最晚时间之差
关键路径是时间最长的路径。

















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











