







原版mega2560插上电脑端口显示mega2560,如果想要达到相同效果需要两步:
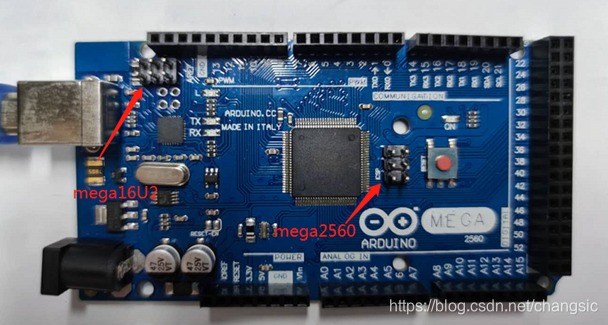
一、烧录Atmega16U2 :使插入电脑显示“Atmega2560”
如图:
1、准备:USBasp(免驱版)(别看他写的是isp本质就是asp,还可以选择正版USBasp 或者USBtinyISP)

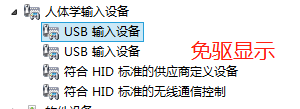

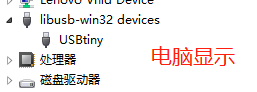


下载相关驱动并安装(USBtiny驱动USBasp驱动 完全解决数字签名问题绝对好使.ziphttps://download.csdn.net/download/changsic/12586197)
(资料包含带第三方数字签名的USBtiny驱动,和USBasp无需重启计算机解决无第三方数字签名的问题)
2、连接Atmega16U2 ICSP接口
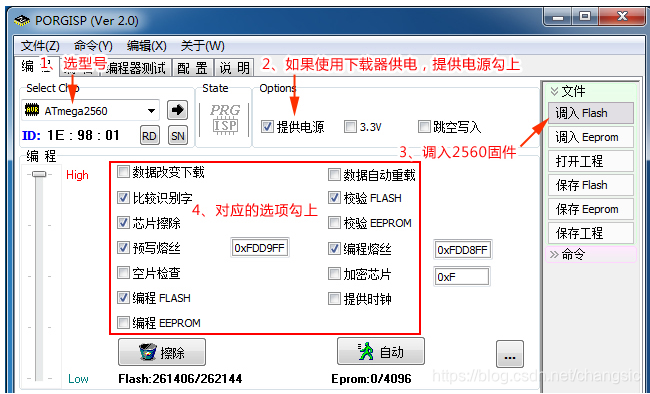
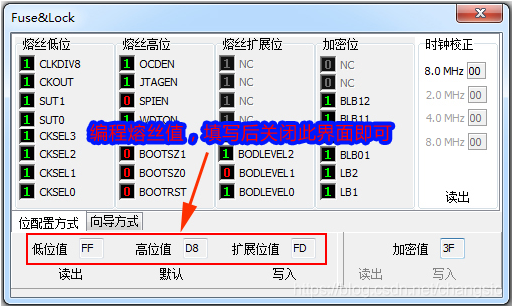
3、打开progispV2.0(https://download.csdn.net/download/changsic/12586193)
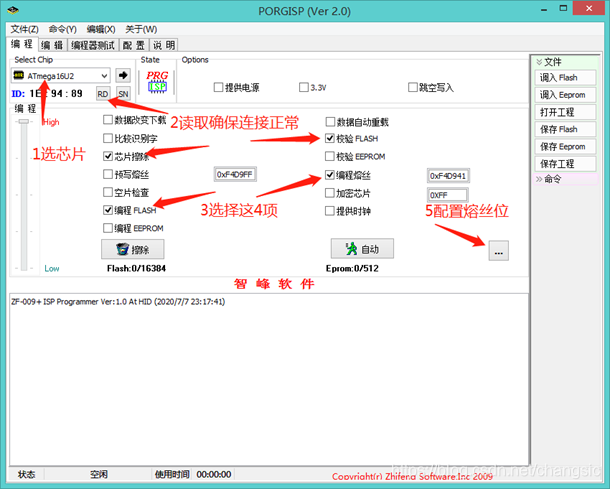
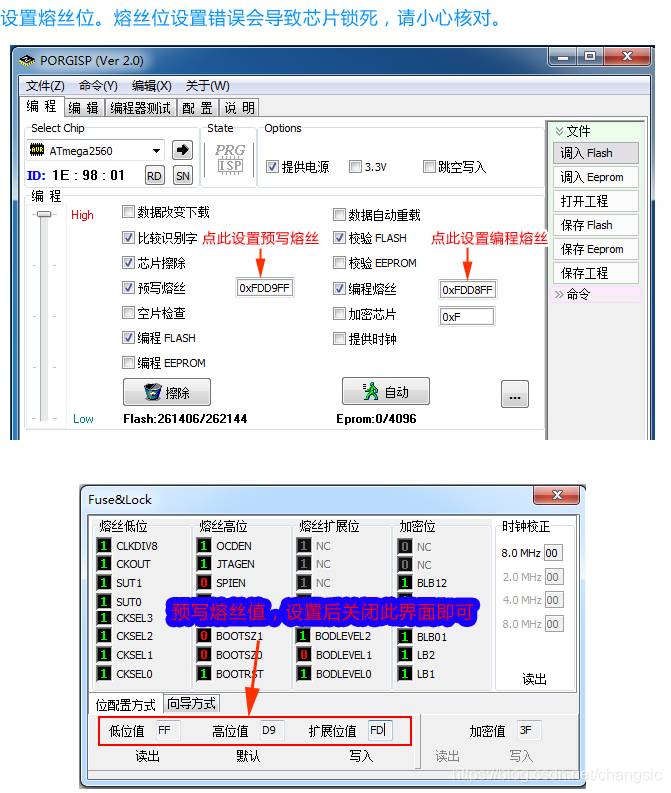
熔丝配置如下(同样适用与Uno)

然后
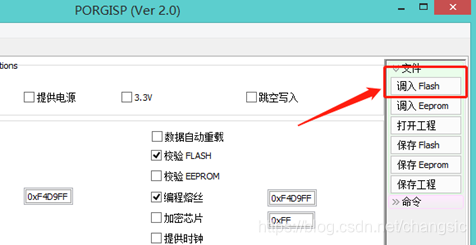
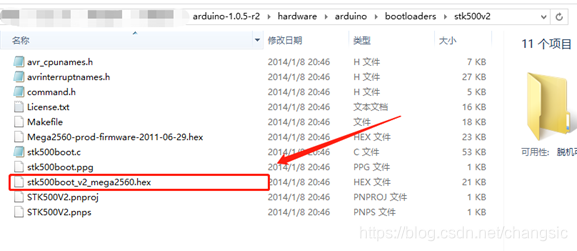
arduinoIDE安装目录中的如下目录
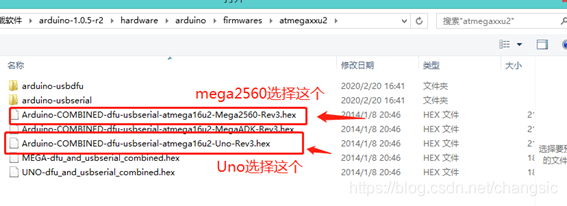
选中---打开---如下
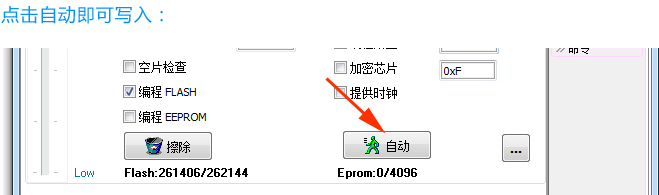
4、点击自动
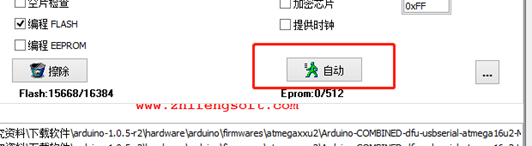
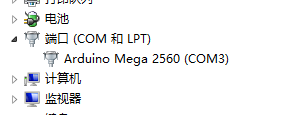
大概3分钟之后显示成功,之后做好的板子插电脑会显示:端口:Arduino mega2560
二、BootLoader for mega2560
刚才是为了能使板子连接电脑,这一步是为了能给mega2560 下载程序
以免驱USBasp为例(其他方法见下“三”)
固件在arduinoIDE根目录下
连接正常的话大概过3分钟就好
三、USB asp 或者USBtiny 为mega2560 BootLoader
-
打开IDE
-
工具—开发板---编程器(对应选好)aspde 就选USBasp USBtiny的选择tiny
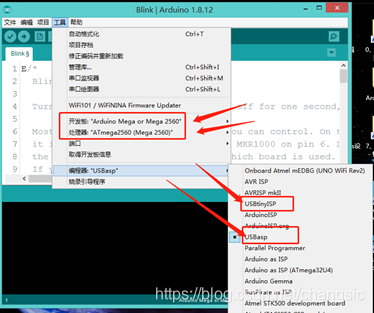
-
然后烧录引导程序。
-
Ok。没问题的话下载个blink程序看看


















 10000
10000

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











