






在上一篇文章为什么自适应调零抗干扰天线不能做RTK差分定位?中,我们探讨了自适应调零抗干扰天线为何不适合进行RTK差分定位,并介绍了RTK差分定位对卫星导航天线相位中心稳定性的严格要求。今天我们介绍自适应调零天线的基本原理,说明在自适应调零天线正常工作时,其相位中心如何变化,以及为何不适合RTK差分定位。
自适应调零抗干扰天线的使用
在介绍调零抗干扰天线的基本原理之前,首先要明确的是,抗干扰天线并不是万能的。它仅能抑制某些类型的干扰,并且这些干扰的功率必须低于一定的阈值。目前世界上没有一种抗干扰天线能够适应所有干扰场景。
在抗干扰天线选型指南:如何选择适合你的抗干扰天线?,这篇文章中已经详细介绍了抗干扰天线的主要性能指标的含义,以及如何选择一款合适的抗干扰天线。
在有干扰的情况下,抗干扰天线同时接收卫星信号和干扰信号,通过滤除干扰信号并保留卫星信号,输出干净的信号给后端的卫星定位接收机,从而确保接收机在有干扰的环境中仍能正常工作。抗干扰天线的使用环境如下图所示:
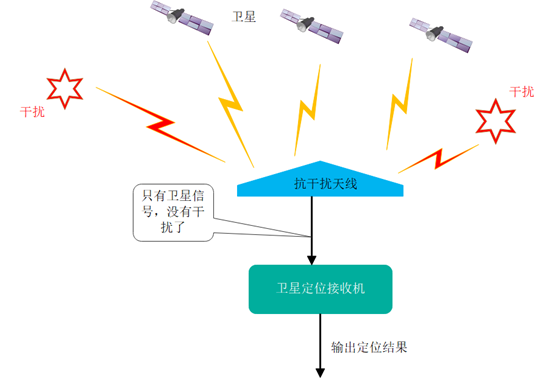
抗干扰天线使用场景
调零抗干扰天线的组成
以北斗B3四阵元调零抗干扰天线为例,我们来说明其组成结构。
北斗B3四阵元调零抗干扰天线主要由天线阵列单元、射频通道单元、抗干扰单元和电源单元等部分组成。天线内部的组成示意图如下:
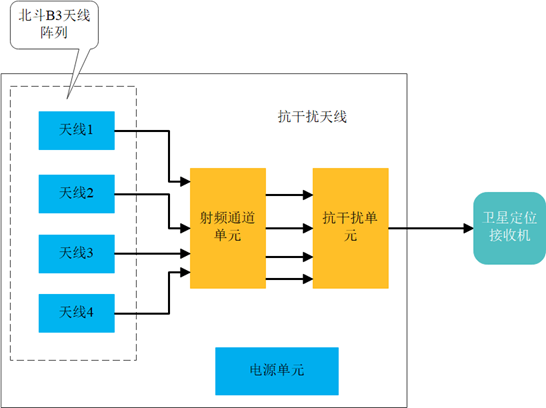
抗干扰天线内部组成
天线阵列单元由4个北斗B3频段的天线阵元组成,用于接收北斗B3频段的卫星信号。这些信号通过射频电缆分别传送至射频通道单元。
射频通道单元由4个完全独立且相同的射频通道构成,每个通道分别处理一个天线输出的信号。射频通道包括前置低噪声放大器、下变频、数控衰减、中频滤波和中频放大等多个模块,最终将北斗卫星B3频段的射频信号转换为数字部分能够处理的中频信号。
抗干扰处理单元是整个系统的"大脑"。以下是其组成的示意图:
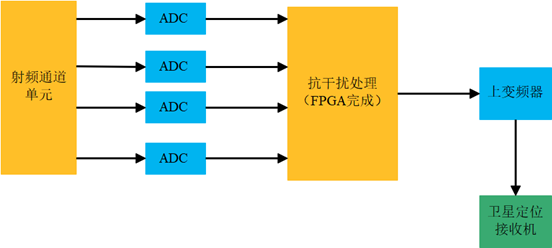
抗干扰处理模块
4个射频通道的信号经过4路ADC采样后,传送至FPGA中进行抗干扰调零处理。为了与后端的卫星定位接收机匹配,处理后的信号经过上变频模块,将中频信号恢复为北斗B3频段的射频信号,然后输出给卫星定位接收机。
备注:随着技术水平的发展,目前早就有了专用的集成芯片能够实现抗干扰处理的功能。
调零抗干扰天线的算法实现
北斗B3四阵元调零抗干扰天线的算法实现如下图所示:
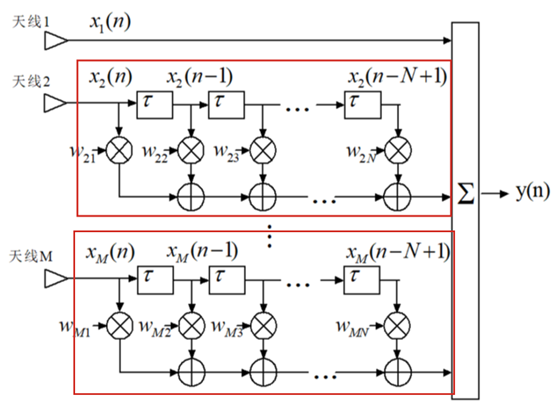
抗干扰算法
图中天线1、天线2......天线M表示输入的M路经过ADC采样的信号。以4阵元天线为例,M=4。
图中红色框内的部分表示N阶FIR滤波器,其中w21, w22, w23......w2N是天线2对应的FIR滤波器的系数,而Wm1, Wm2, Wm3......WmN是天线M对应的FIR滤波器的系数。
四阵元调零抗干扰天线中,天线2、天线3和天线4的信号经过各自的FIR滤波器处理后,与天线1的信号相加求和,得到经过调零抗干扰处理的信号y(n)。
这个信号经过上变频后输出给卫星定位接收机。
简单来说,调零抗干扰天线的基本原理如下:
通过调整多路信号的加权参数W(w21, w22, w23......w2N, ...... Wm1, Wm2, Wm3......WmN),控制天线阵列的方向图。合成后的信号y(n)在干扰方向上形成一个零点,使该方向上的天线增益显著低于其他方向(例如干扰抑制能力在60dB以上),从而实现抗干扰功能。
由于四个天线单元的信号经过调零处理后最多能够生成3个零点,因此最多可以抑制3个方向的干扰。
FIR滤波器的延时与滤波器的参数有关,如果参数固定,滤波器的延时也是固定的。相反,如果FIR滤波器的参数发生变化,滤波器的延时也会随之改变。
在自适应调零天线中,M-1个FIR滤波器的参数,即调零抗干扰天线的加权系数Wij,会不断调整吗?
答案是肯定的,这些参数会不断发生变化。
调零算法的实现过程本质上是一个不断迭代、逐渐收敛的动态过程。不同的调零算法有不同的加权系数调整方法。例如,经典的功率倒置法是基于输出功率或均方误差最小化的原则进行判断。收敛过程按照设定的规则不断调整加权系数,最终确保输出信号y(n)的功率或均方差达到最小。
另外如果干扰的数目,样式,功率发生变化了,自适应算法会重新计算加权系数,在干扰方向形成零点。现实条件下的干扰一般都是时变的,那么抗干扰天线接收到的干扰的状态也是时变的,这必然带来加权系数的变化,输出y(n)的相位也会不断变化。
综上所述,自适应调零天线的加权系数Wij会不断调整、收敛和变化,从而导致输出信号y(n)的相位也不断变化。
为什么自适应调零天线不适合RTK差分?
在之前的讨论中,我们提到RTK差分定位需要天线相位中心保持稳定。然而,自适应调零天线的输出信号相位是随时间变化的,无法保持稳定。因此,使用自适应调零天线无法进行RTK差分定位。
如何兼顾抗干扰和RTK差分
那么,有没有办法在确保抗干扰的同时,实现RTK差分呢?厂家们提出了几种变通的方法:
1) 用直通模式实现RTK
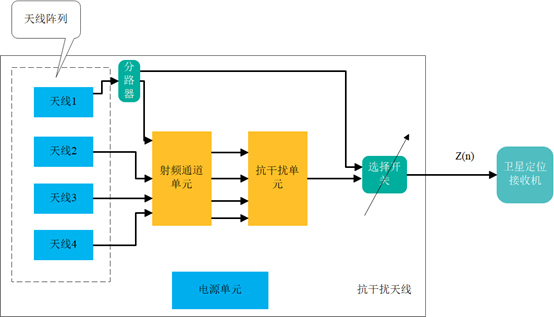
直通模式
天线1的信号可以分出一路,在输出端通过开关切换的方式直接输出给z(n),这样就断开了自适应调零模块。天线1的信号即可参与RTK差分解算。
2) 增加一个天线做RTK
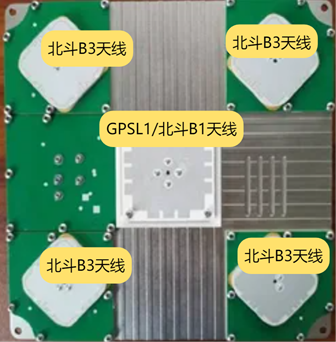
增加一个天线
在4阵元天线的中央增加一个其他频点的天线,该天线的信号与自适应调零模块的输出合并后输出给z(n)。例如,常见的四阵元北斗B3抗干扰天线,四周的4个北斗B3天线用于抑制北斗B3频段的干扰,同时在中央增加一个GPS L1/北斗B1频段的天线,用于进行RTK差分解算。
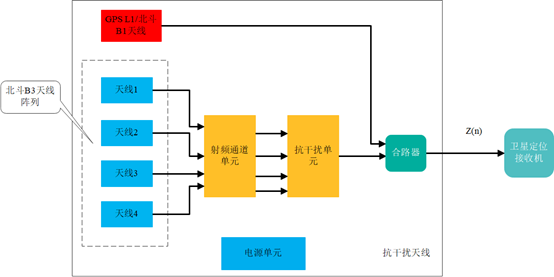
增加一个天线
以上两种方法虽然在一定程度上解决了抗干扰和RTK差分的问题,但都没有实现完全同时抗干扰和RTK差分。
究竟有没有一种办法能够同时满足这两点要求呢?我们将在下一章节中为您揭晓。
未完待续。

















 9505
9505

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









