






又到一学期期末课程设计周
计科小学生又来发布课程设计
本次是高级程序设计
用MFC构建界面,调用opencv动态链接库,再加上openmp实现并行计算。
看起来高大上很多。
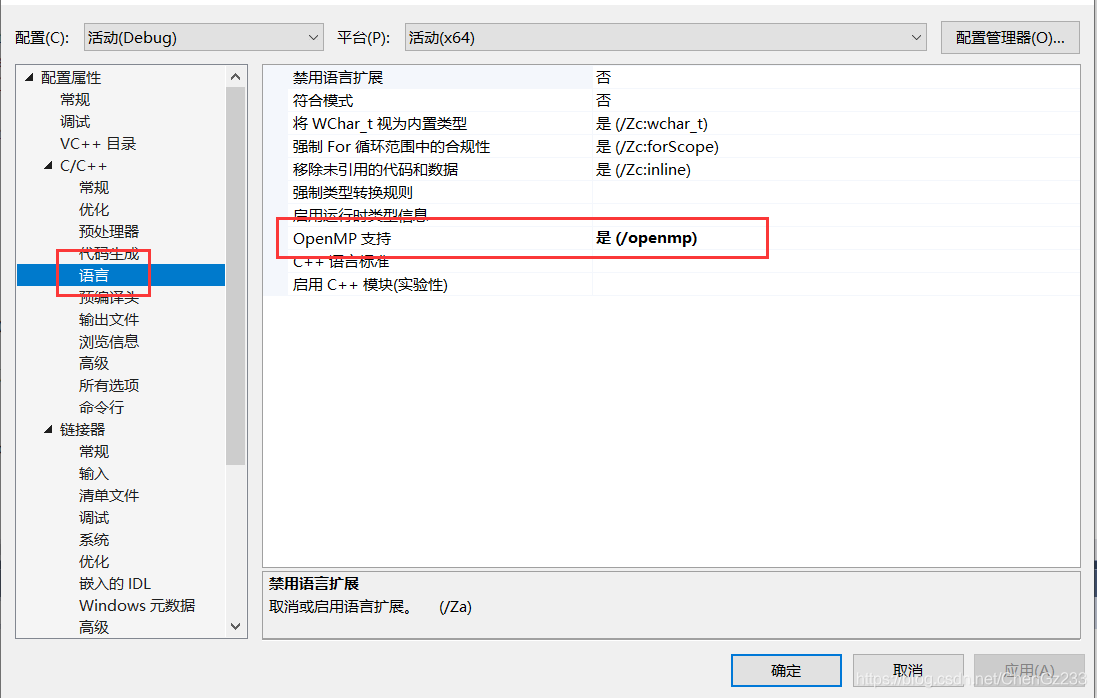
提示
如果要使用openmp要在配置中打开
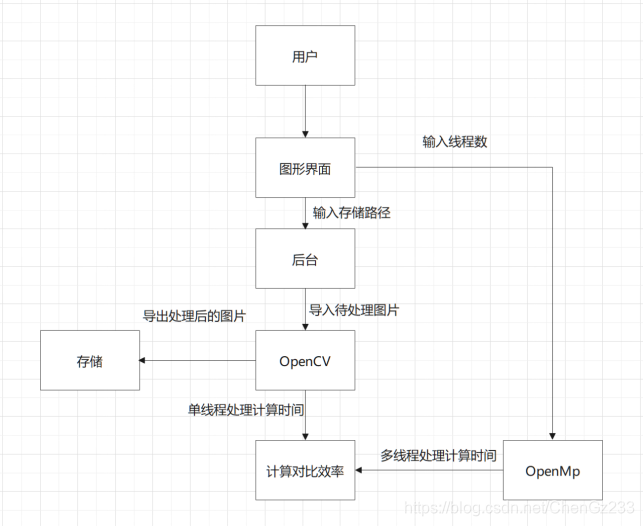
业务流程大致如此:
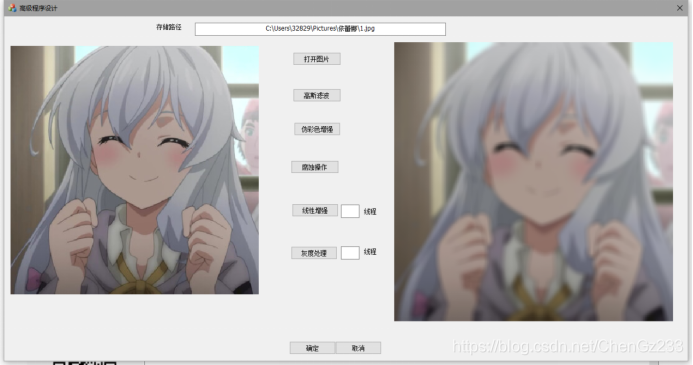
高斯滤波:
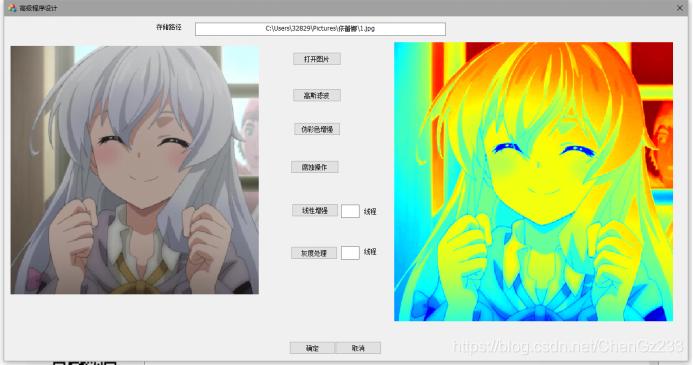
伪色彩增强:
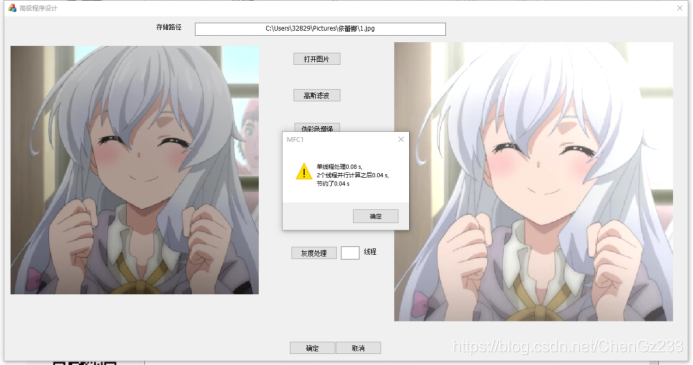
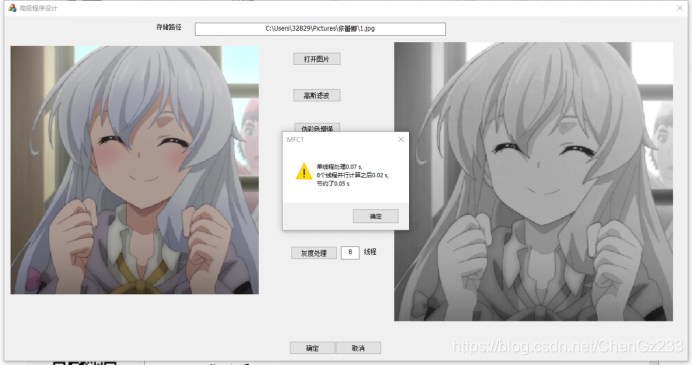
在进行线性增强和灰度处理时可以选择多线程处理来缩减响应时间
,分别以2线程和8线程展示:
代码部分细节:
点击打开图片按钮响应对应的代码细节展示:
点击“确定”按钮后获取文件路径到strPathName,并将文件路径显示到编辑框
if (dlg.DoModal() == IDOK)
{
strPathName = dlg.GetPathName();
m_file.SetWindowText(strPathName);
}
使用StretchDIBits函数显示图片
StretchDIBits(GetDlgItem(IDC_STATIC)->GetDC()->GetSafeHdc()
, 0, 0, std::min(rect.Width(), rect.Height()), std::min(rect.Width(), rect.Height())
, 0, 0, cvImgTmp.cols, cvImgTmp.rows,
cvImgTmp.data, &bitmapInfo, DIB_RGB_COLORS, SRCCOPY);
声明图片大小
bmiHeader = &bitmapInfo.bmiHeader;
bmiHeader->biSize = sizeof(BITMAPINFOHEADER);
bmiHeader->biWidth = cvImgTmp.cols;
bmiHeader->biHeight = -cvImgTmp.rows;
bmiHeader->biPlanes = 1;
bmiHeader->biBitCount = 24;
bmiHeader->biCompression = BI_RGB;
bitmapInfo.bmiHeader.biSizeImage = 0;
bmiHeader->biXPelsPerMeter = GetSystemMetrics(SM_CXSCREEN);
bmiHeader->biYPelsPerMeter = GetSystemMetrics(SM_CYSCREEN);
bmiHeader->biClrUsed = 0;
bmiHeader->biClrImportant = 0;
使用IsIconic函数来判断当前界面是否已经有图像打开
若没有则按照路径打开图片,若已存在图片
使用CPaintDC函数对当前图层关闭,然后再显示选中图片
if (IsIconic())//IsIconic()作用是判断窗口是否处于最小化状态(点击了最小化按钮之后
{
CPaintDC dc(this); // device context for painting
SendMessage(WM_ICONERASEBKGND, reinterpret_cast<WPARAM>(dc.GetSafeHdc()), 0);//窗口调用窗口程序
// Center icon in client rectangle
int cxIcon = GetSystemMetrics(SM_CXICON);//窗体显示区域的宽度和高度、滚动条的宽度和高度
int cyIcon = GetSystemMetrics(SM_CYICON);
CRect rect;
GetClientRect(&rect);//GetClientRect用于取得指定窗口的客户区域大小
int x = (rect.Width() - cxIcon + 1) / 2;
int y = (rect.Height() - cyIcon + 1) / 2;
// Draw the icon
dc.DrawIcon(x, y, m_hIcon);
}
对图片进行高斯滤波处理
if (str == "")
{
AfxMessageBox(_T("请先打开图片!"));
return;
}
Mat image = imread(str, 1);
Mat out;
//进行滤波操作
GaussianBlur(image, out, Size(9, 9), 10, 0);//X方向上的高斯核标准偏差;
imwrite("高斯滤波.jpg", image);
waitKey();
点击伪色彩增强
if (str == "")
{
AfxMessageBox(_T("请先打开图片!"));
return;
}
Mat im_gray = imread(str, 1);
Mat im_color;
applyColorMap(im_gray, im_color, COLORMAP_JET);
imwrite("伪彩色增强.jpg", im_color);
waitKey(0);
对图像进行腐蚀操作
if (str == "")
{
AfxMessageBox(_T("请先打开图片!"));
return;
}
Mat src = imread(str, 1);
Mat element = getStructuringElement(MORPH_RECT, Size(15, 15));
Mat dsImage;
erode(src, dsImage, element);
imwrite("腐蚀操作.jpg", dsImage);
waitKey(0);
对图片进行线性增强
分别使用三个通道存储之前的图像RGB色彩信息,然后使用saturate_cast函数对图片进行线性处理,如果图片位灰度图片则只使用一个变量来存储色阶信息。
if (str == "")
{
AfxMessageBox(_T("请先打开图片!"));
return;
}
Mat src1, dst;
src1 = imread(str,1);
double alpha = 1.2, beta = 50;
dst = Mat::zeros(src1.size(), src1.type());
Mat src2 = src1, dst1 = dst;
float begintime = omp_get_wtime();
for (int row = 0; row < src1.rows; row++)
{
for (int col = 0; col < src1.cols; col++)
{
if (src1.channels() == 3)
{
int b = src1.at<Vec3b>(row, col)[0];
int g = src1.at<Vec3b>(row, col)[1];
int r = src1.at<Vec3b>(row, col)[2];
dst.at<Vec3b>(row, col)[0] = saturate_cast<uchar>(b*alpha + beta);
dst.at<Vec3b>(row, col)[1] = saturate_cast<uchar>(g*alpha + beta);
dst.at<Vec3b>(row, col)[2] = saturate_cast<uchar>(r*alpha + beta);
}
else if (src1.channels() == 1)
{
float v = src1.at<uchar>(row, col);
dst.at<uchar>(row, col) = saturate_cast<uchar>(v*alpha + beta);
}
}
}
float endtime = omp_get_wtime();
float before = endtime - begintime;
使用多线程加速处理。
使用omp parallel for num_threads(n)语句来进行多线程加速,n为输入的线程数,最后减去初始的时间得到多线程加速后节约的时间。
begintime = omp_get_wtime();
#pragma omp parallel for num_threads(n)
for (int row = 0; row < src2.rows; row++)
{
for (int col = 0; col < src2.cols; col++)
{
if (src2.channels() == 3)
{
int b = src2.at<Vec3b>(row, col)[0];
int g = src2.at<Vec3b>(row, col)[1];
int r = src2.at<Vec3b>(row, col)[2];
dst1.at<Vec3b>(row, col)[0] = saturate_cast<uchar>(b*alpha + beta);
dst1.at<Vec3b>(row, col)[1] = saturate_cast<uchar>(g*alpha + beta);
dst1.at<Vec3b>(row, col)[2] = saturate_cast<uchar>(r*alpha + beta);
}
else if (src2.channels() == 1)
{
float v = src2.at<uchar>(row, col);
dst1.at<uchar>(row, col) = saturate_cast<uchar>(v*alpha + beta);
}
}
}
endtime = omp_get_wtime();
float after = endtime - begintime;
float gap = before - after;
对图片进行灰度处理
使用max函数将图像原本的rgb信息压缩成一个通道
dst.create(src.size(), src.type());
Mat src1 = src, dst1 = dst;
float begintime = omp_get_wtime();
for (int row = 0; row < src.rows; row++)
{
for (int col = 0; col < src.cols; col++)
{
int b = src.at<Vec3b>(row, col)[0];
int g = src.at<Vec3b>(row, col)[1];
int r = src.at<Vec3b>(row, col)[2];
dst.at<Vec3b>(row, col)[0] = max(r, max(g, b));
dst.at<Vec3b>(row, col)[1] = max(r, max(g, b));
dst.at<Vec3b>(row, col)[2] = max(r, max(g, b));
}
}
float endtime = omp_get_wtime();
float before = endtime - begintime;
使用omp parallel for num_threads(n)进行多线程加速处理
begintime = omp_get_wtime();
#pragma omp parallel for num_threads(n)
for (int row = 0; row < src1.rows; row++)
{
for (int col = 0; col < src1.cols; col++)
{
int b = src1.at<Vec3b>(row, col)[0];
int g = src1.at<Vec3b>(row, col)[1];
int r = src1.at<Vec3b>(row, col)[2];
dst1.at<Vec3b>(row, col)[0] = max(r, max(g, b));
dst1.at<Vec3b>(row, col)[1] = max(r, max(g, b));
dst1.at<Vec3b>(row, col)[2] = max(r, max(g, b));
}
}
endtime = omp_get_wtime();
float after = endtime - begintime;
float gap = before - after;
以上就是整体框架了














 1380
1380











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









