






 本文介绍了51单片机如何实现智能小车的寻轨和避障功能。通过使用寻迹传感器和红外传感器,智能小车能够检测黑线并避开障碍物。寻迹传感器利用黑色对光线的反射率低的特性来判断轨迹,而红外传感器则通过感应障碍物来触发避障机制。代码实现过程中,这两个功能是分开调试的。
本文介绍了51单片机如何实现智能小车的寻轨和避障功能。通过使用寻迹传感器和红外传感器,智能小车能够检测黑线并避开障碍物。寻迹传感器利用黑色对光线的反射率低的特性来判断轨迹,而红外传感器则通过感应障碍物来触发避障机制。代码实现过程中,这两个功能是分开调试的。
我们先来讨论智能小车的各个模块:
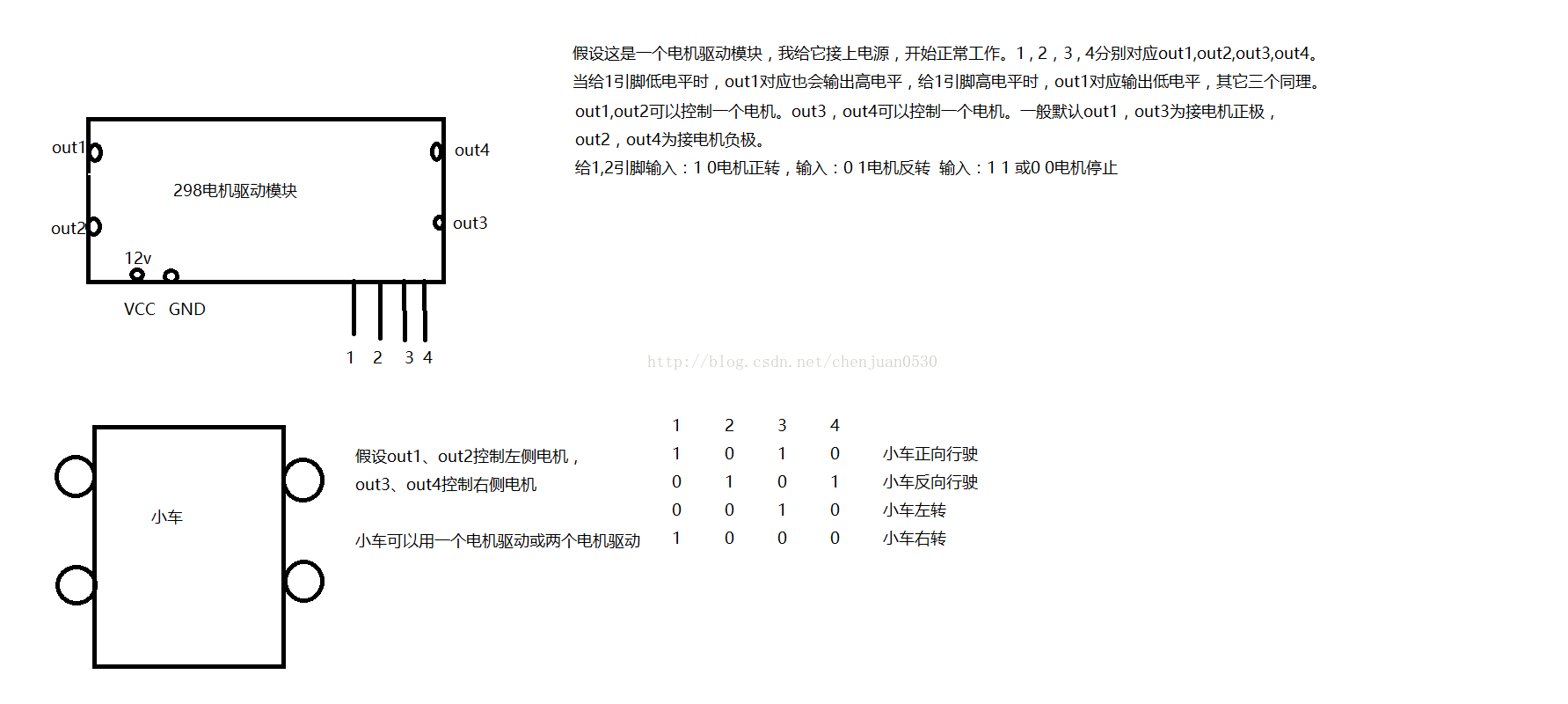
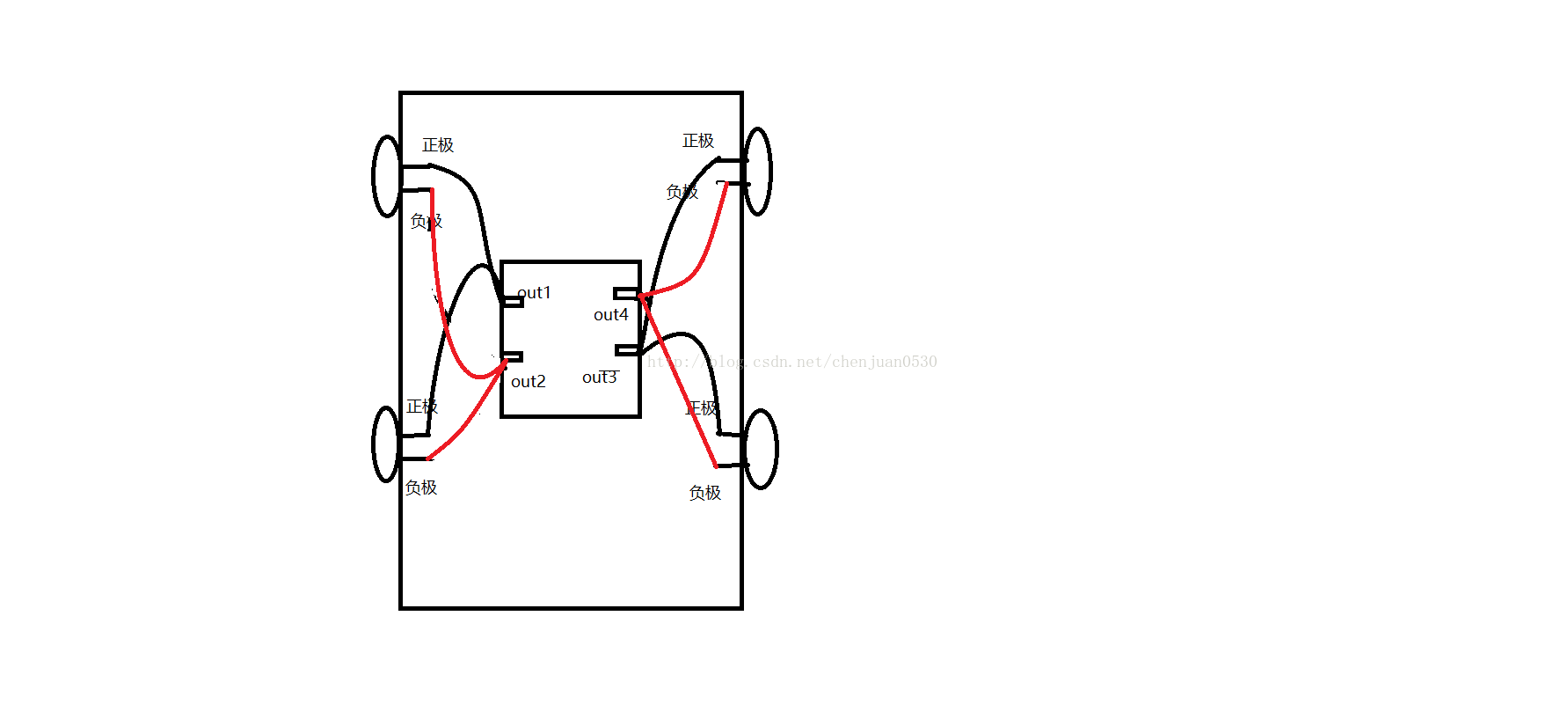
1.电机驱动
2.寻迹传感器
它具有四个引脚,分别是:VCC GND D0 A0,我们只需要用到三个引脚,AO不需要使用。一般智能小车上我们是安装两个,左边一个右边一个。
原理:
1.利用黑色对光线的反射率小这个特点,当平面的颜色不是黑色时,反射器发射出去的红外光被大部分反射回来。于是传感器输出低电平0。
2.当平面中有一条黑线,传感器在黑线上方时,因黑色的反射能力很弱,反射的红外光很少,打不到传感器动

2.寻迹传感器
它具有四个引脚,分别是:VCC GND D0 A0,我们只需要用到三个引脚,AO不需要使用。一般智能小车上我们是安装两个,左边一个右边一个。
原理:
1.利用黑色对光线的反射率小这个特点,当平面的颜色不是黑色时,反射器发射出去的红外光被大部分反射回来。于是传感器输出低电平0。
2.当平面中有一条黑线,传感器在黑线上方时,因黑色的反射能力很弱,反射的红外光很少,打不到传感器动
 4544
2万+
4544
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























