







目录
1. What and Why?
在基于TOA 或者TDOA 的定位方案中,都需要多个基站(不少于3 个)才能实现定位。而如果Anchor能够支持AOA 测量,那么结合AOA 和TOA,只需要2 个(甚至1 个—需要其它测量数据辅助) Anchor 就可以实现定位。
在UWB系统中,到达角度(AOA)可以通过经由不同天线接收到的信号之间的相位差的估计来间接地进行估计。这个基于相位差的估计来估计AOA的计数就叫做PDOA(Phase Difference of Arrival).
2. Mathematical Principle
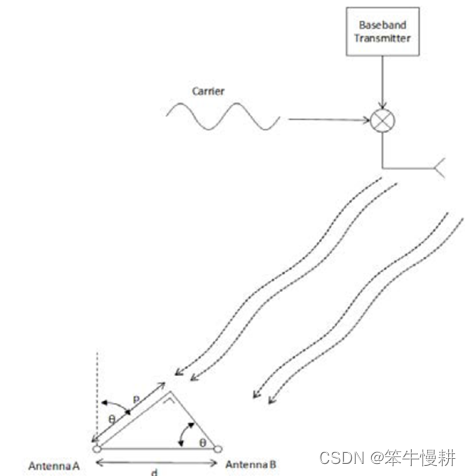
图1 Principles of AOA estimation based on PDOA
The mathematical principle for the PDOA is shown below:
其中代表两根天线接收的信号中的First-Path 的到达相位之差(phase difference of arrival),这也是PDOA 名字的来由。
3. 约束条件
3.1 时钟
PDOA 的实现要求两根接收天线对应的接收链路工作于同源时钟。
Decawave公司的初代芯片DW1000不支持单芯片PDOA 方案,文[1]是用两个DW1000 在共用外部晶振时钟源的条件下做的实验。
3.2 天线间隔
PDOA要求两根天线靠得非常近—理想的情况是两根接收天线的间隔为波长的一半,即λ/2。
天线距离偏离最优间隔会有什么影响呢?这里所说的最优天线间隔是指在不产生相位模糊的前提下使得到达相位差最大化的间隔。如上一节所示,PDOA 的基本原理是将到达角度θ转换为到达相位差![]() ,通过到达相位差的测量来间接地估计到达角度。从θ转换为
,通过到达相位差的测量来间接地估计到达角度。从θ转换为![]() 的放大倍数越大,则估计精度会越高。
的放大倍数越大,则估计精度会越高。
如下图所示,天线间隔为最优距离时,在 范围内,
![]() 与
与![]() 存在一一对应的关系,在中间的线性部分的斜率大概为3左右。
存在一一对应的关系,在中间的线性部分的斜率大概为3左右。
当天线间隔小于最优间隔时, 的线性部分的斜率变小了,这意味着相比最优天线间隔时估计精度有损失。
当天线间隔大于最优间隔时, 的线性部分的斜率更大,但是存在相位模糊现象,即
的关系不满足一一对应关系,而是多对一关系。这样由
![]() 就不能唯一地确定
就不能唯一地确定![]() 。这意味着对
。这意味着对![]() 的估计范围变小了。
的估计范围变小了。
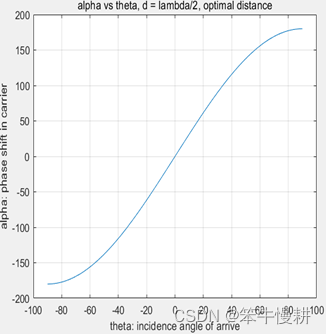
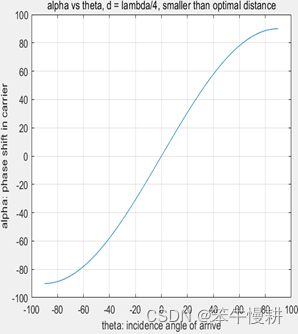
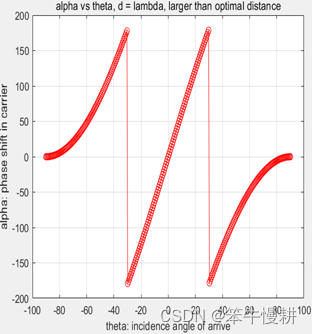
图2 不同天线间隔条件下的到达角度与相位差的关系
DW专利CN106664119B中建议用较大的天线间距来进行相位差估计,然后再用其它的策略来消除解的模糊性问题。
另一方面,考虑6.5GHz 载波频率的情况,![]() ,如此近距离放置两个天线会存在严重的耦合效应。Furthermore, the channels to each antenna element are not linear phase channels and will introduce group delay and phase delay.
,如此近距离放置两个天线会存在严重的耦合效应。Furthermore, the channels to each antenna element are not linear phase channels and will introduce group delay and phase delay.
4. PDOA advantage over TDOA
PDOA 相比TDOA(因为存在两根接收天线,所以TDOA 是天然存在的选项,所以这里只比较PDOA 和TDOA)有什么优势呢?
考虑45 度的方位角,即θ=π/4 ,代入前文的公式(assuming the optimum antenna distance d = 2.3cm),可以得到两根天线的到达时间差(TDOA)为:
这么小的数值已经远远超出了基带接收机的时间测量精度范围了。相比之下,3*45=135 度的相位差的估计就要容易得多。事实上,PDOA 可以看作利用放大效应通过一个较容易测量的量来间接估计一个比较难以测量的量的一种手段。
5. 面向实现的考虑及仿真
To be added.
[Reference]
[1] Igor Dotlic, et al. Angle of Arrival Estimation Using Decawave DW1000 Integrated Circuits
[2] DW patent, US10056993 B2
[3] Decawave, PDOA Primer


















 1895
1895

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











