







 本文提出了一种结合特征颜色和边缘检测的双行车牌定位方法,通过颜色提取、Sobel边缘检测和形态学变换提高定位准确性。实验结果显示,识别率可达97.5%,有效减少了干扰边缘,提升了定位效率。
本文提出了一种结合特征颜色和边缘检测的双行车牌定位方法,通过颜色提取、Sobel边缘检测和形态学变换提高定位准确性。实验结果显示,识别率可达97.5%,有效减少了干扰边缘,提升了定位效率。
摘要:本文提出了一种基于特征颜色和边缘检测的双行车牌定位算法。通过分析局部区域内指定颜色的分布特征,先进行车牌颜色提取,然后对提取后的车牌进行边缘检测,排除了大量干扰 ,极大地减轻了后续处理工作的难度。缩短了定位时间,同时成功定位率也有所提高。最后通过形态学变换和筛选,对车牌进行定位。
关键词:特征颜色提取;车牌定位;数学形态学;Sobel边缘检测
1.引言
随着现代化交通的发展,车辆牌照自动识别技术越来越受到人们的重视,是近年来计算机视觉与模式识别技术在智能交通领域的重要研究课题之一。车辆牌照自动识别系统可用于公路收费站、停车场、十字路口等场所的车辆管理,对于道路交通和停车场车辆管理具有重要的促进作用。
车牌识别技术包括车牌定位、字符分割和字符识别3个基本环节,其中车牌定位是字符分割和字符识别的前提,也是牌照识别的难点。在这方面已有很多学者做了研究,提出了多种车牌定位方法。大体分成以下三类:
1)基于车牌底色的定位方法。对车牌底色进行加强,再用投影方法确定车牌位置;
2)基于车牌纹理特征的定位方法。由于车牌区域字符比较集中,其纹理特征有别于其他区域,通过小波变换、边缘增强等方法提取该特征,实现车牌定位;
3) 基于机器学习的车牌定位方法。
方法1~3均基于车牌区域的单一特征。当背景中出现近似纹理时,方法1定位难度大大增加,尤其虚警率大大增加; 方法2对于高清图片识别率很好,但是当背景中出现近似颜色或者受环境、光照影响较大时,准确率较低。方法3关键是找到好的特征和好的训练方法,我曾在上次作业中利用adaboost+haar特征进行车标检测,从我的实验结果来看,检测率也能达到90%以上,但同时虚警率也非常高,会出现很多误检,而且很难把车牌的区域完整的检测出来,所以如果单独要用机器学习的算法还是不太可行。
2. 基于多重特征的车牌定位方法
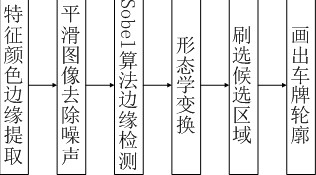
本文采用基于多重特征的定位方法。对车牌颜色(纹理)进行提取,确定若干候选区域,并结合数学形态学方法得到若干候选区域,通过大小、长宽比例等几何特征确定牌照区域。算法流程图如下:
2.1特征颜色检测
在基于颜色的数字图像处理中常用的颜色模型有RGB和HSV两种,RGB模型中各像素值由红色(R)、绿色(G)和蓝色(B)3种颜色分量的亮度值叠加来表示。在HSV空间中,各分量具有独立的色彩信息,其中H表示色调,符合人眼对颜色特征的感知;S表示饱和度,对应于人眼感知的颜色深浅特征;V表示亮度,对应于图像像素的灰度等级。由于HSV的阈值较难确定,所以采取RGB颜色模型提取特征区域,输入图像如图1所示。

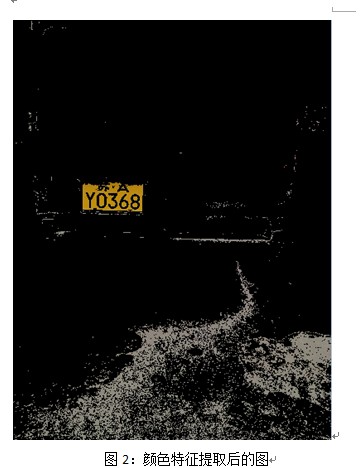
在RGB空间,考虑RGB易受光亮等因素影响,选取较大的阈值。进行颜色提取后如图2所示。可以看出,提取效果较好。
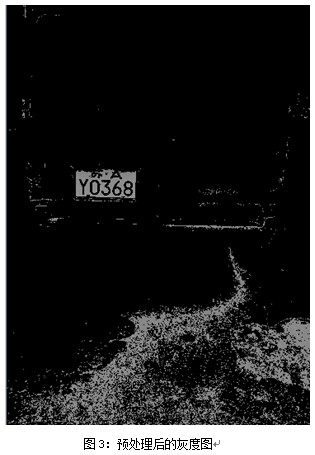
2.2图像预处理
图像预处理主要是为了后续处理的需要进行一些滤波和梯度增强的处理。将颜色提取后的图像进行平滑和去噪以后,转化的灰度图3如图所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









