







 SPM(Spatial Pyramid Matching)是一种改进的图像识别算法,通过在不同分辨率上统计特征点分布来保留局部信息。它解决了BOF(Bag Of Features)丢失图像局部细节的问题。算法主要包括Pyramid Match Kernels和Spatial Matching Scheme两部分,使用SIFT特征检测、KMeans聚类构建词典,并通过多尺度的直方图匹配计算图像的相似度。SPM通过连接各尺度的直方图特征形成分类的特征向量。
SPM(Spatial Pyramid Matching)是一种改进的图像识别算法,通过在不同分辨率上统计特征点分布来保留局部信息。它解决了BOF(Bag Of Features)丢失图像局部细节的问题。算法主要包括Pyramid Match Kernels和Spatial Matching Scheme两部分,使用SIFT特征检测、KMeans聚类构建词典,并通过多尺度的直方图匹配计算图像的相似度。SPM通过连接各尺度的直方图特征形成分类的特征向量。
SPM即Spatial Pyramid Matching,是一种利用空间金字塔进行图像匹配、识别、分类的算法。SPM是BOF(Bag Of Features)的改进,因为BOF是在整张图像中计算特征点的分布特征,进而生成全局直方图,所以会丢失图像的局部/细节信息,无法对图像进行精确地识别。为了克服BOF的固有缺点,作者提出了SPM算法,它是在不同分辨率上统计图像特征点分布,从而获取图像的局部信息。
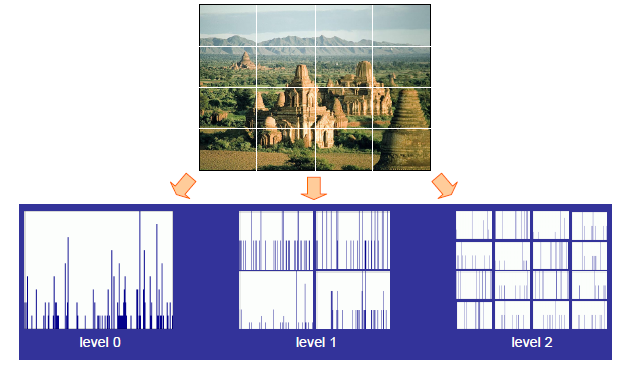
如上图所示,将level(i)的图像划分为pow(4,i)个cell(bins),然后再每一cell上统计直方图特征,最后将所有level的直方图特征连接起来组成一个vector,作为图形的feature。在后文的描述中cell和bins是等价的。
Pyramid Match Kernels:
1)假设存在两个特征集合X、Y,其中每个特征x的维度为d。将特征空间划分为不同的尺度,在尺度

个bins,那么d维的特征空间就能划出
个bins(论文中这么描述,但是在实际中是用K-means或BOW进行聚类,得到的每个类中心就是一个bin)。
2) 在level(i)中,如果点x,y落入同一bin中就称x,y点Match,每个bin中匹配的点的个数为
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









