






一、Canny边缘检测算法深入解析
Canny边缘检测算法,由John Canny在1986年提出,是计算机视觉中用于边缘检测的一种高效算法。它旨在多个不同视觉任务中提供理想的边缘检测,优化了边缘检测的准确率和清晰度。该算法特别注重以下三个标准:
- 低错误率:边缘检测应正确标记尽可能多的实际边缘,避免非边缘被标记。
- 高定位精度:检测到的边缘应尽可能接近真实边缘的实际位置。
- 最小响应:边缘只能在图像中被标记一次,并且图像中的噪声不应产生误检。
Canny边缘检测通过以下五个步骤实现这些目标:
1. 噪声降低
在进行边缘检测之前,首先需要减少图像的噪声。Canny推荐使用高斯滤波器对图像进行平滑处理,这是因为高斯滤波器是在保留边界位置的同时有效抑制噪声的最佳滤波器之一。
2. 计算图像梯度
边缘可以在图像中表现为亮度的“梯度”。Canny算法使用四方向的Sobel算子来计算水平和垂直方向的梯度强度和方向。这些梯度将被用来确定图像中每一点的边缘强度。
3. 非极大值抑制
通过梯度计算得到的边缘是相当“粗”的,非极大值抑制的作用是细化这些边缘。该算法遍历所有的图像像素,并去除非边缘强度的像素,仅保留局部最大梯度值的像素点,这样做可以确保边缘尽可能细且清晰。
4. 双阈值算法
为了进一步消除假阳性和定位边缘,Canny使用了双阈值。阈值的选择依赖于图像的内容:高阈值用来识别强边缘,低阈值用来识别弱边缘。强边缘通常直接确定为边缘,而弱边缘则需要在连接到强边缘时才被确定。
5. 边缘跟踪通过滞后技术
最后一步是通过滞后技术连接弱边缘与强边缘。这一步骤中,只有当弱边缘像素与强边缘像素相连时,它们才被保留为边缘像素,否则将被抑制。这种方法有助于保证边缘的连续性和完整性。
Canny边缘检测算法因其优异的检测性能和对实际边缘位置的高精度定位而被广泛应用于图像处理领域。尽管Canny算法在处理较大噪声或边缘模糊的图像时可能会面临挑战,但其在多种情况下仍展现出卓越的边缘检测效果。通过调整算法中的高斯滤波参数和双阈值,可以有效应对不同的图像环境和需求。
二、使用OpenCV库函数实现Canny边缘检测
OpenCV库提供了Canny()函数,这是一个高效且直接的方法用于执行边缘检测,广泛应用于各种图像处理任务中。这个函数封装了Canny边缘检测算法的所有复杂性,使得实现过程非常简洁。接下来,我们将详细介绍如何利用OpenCV实现Canny边缘检测,并通过一个代码示例展示整个过程。
步骤解析和代码实现:
-
读取图像:首先,我们需要读取待处理的图像文件。在OpenCV中,
imread()函数用于从指定路径加载图像。 -
转换为灰度图:Canny算法需要在单通道的灰度图上操作,因此我们使用
cvtColor()函数将读入的彩色图转换成灰度图。这一步是必须的,因为边缘检测在灰度级上进行。 -
应用Canny边缘检测:调用
Canny()函数执行边缘检测,其中threshold1和threshold2参数分别代表低阈值和高阈值。这两个阈值用于边缘检测中的双阈值链接过程。 -
可视化结果:使用matplotlib库显示原始图像和边缘检测结果。这不仅帮助我们验证算法的效果,也使得结果更直观。
完整的Python代码示例:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图像
src = cv2.imread('ima.jpeg')
# 将图像转换为灰度
dst = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
# 应用Canny边缘检测
edge = cv2.Canny(dst, threshold1=100, threshold2=200)
# 可视化结果
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(src, cv2.COLOR_BGR2RGB)) # 将BGR转换为RGB以正确显示颜色
plt.title('Original Image')
plt.axis('off') # 关闭坐标轴
plt.subplot(1, 2, 2)
plt.imshow(edge, cmap='gray')
plt.title('Edge Detection')
plt.axis('off') # 关闭坐标轴
plt.show()
结果:
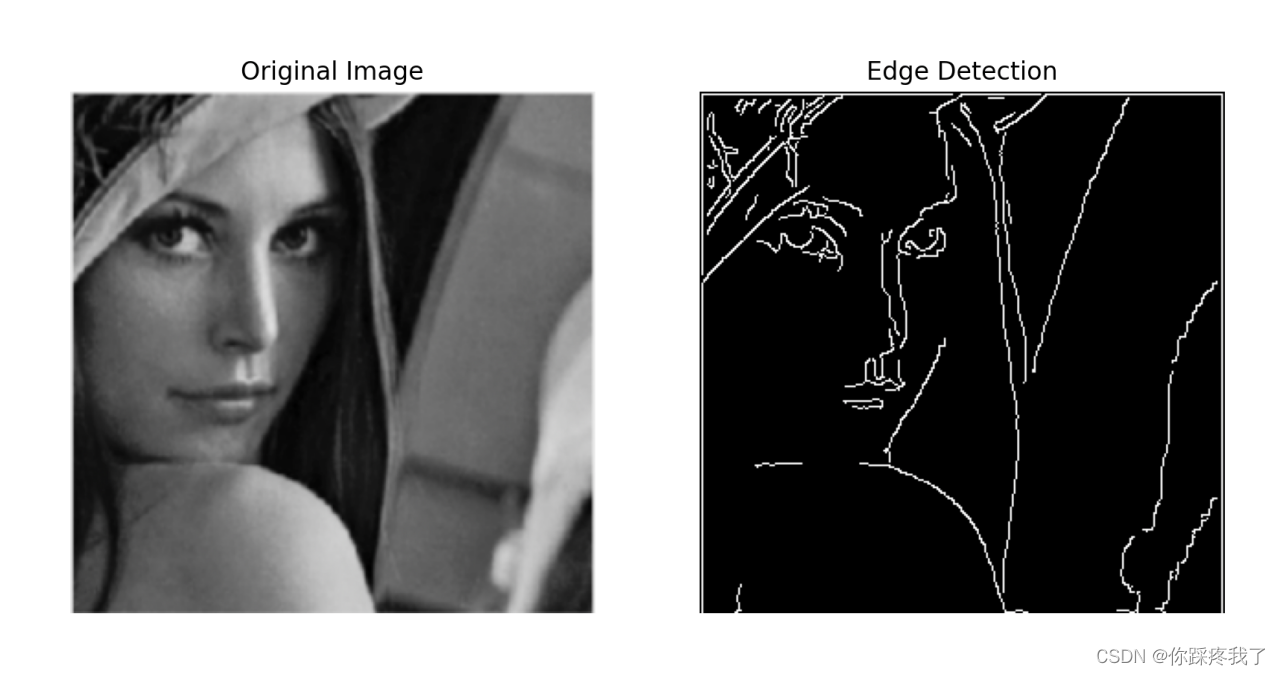
如上图所示,Canny边缘检测算法在原始图像上执行后产生了清晰的边缘图。这个结果展示了Canny边缘检测算法的强大能力,尤其是在处理具有清晰边缘和高对比度的图像时。然而,为了达到最佳的边缘检测性能,选择合适的高斯模糊参数和阈值是关键。实际应用中,可能需要根据具体的图像特征和需求调整这些参数,以确保最佳的边缘检测效果。
三、手动实现Canny边缘检测:深入理解底层逻辑
尽管OpenCV库的Canny()函数为边缘检测提供了一种快速且简便的方法,深入了解并手动实现该算法可以帮助我们更好地理解其内部工作原理和关键步骤。下面将逐步详细解释如何从头构建Canny边缘检测算法,以及每个步骤的底层逻辑和数学原理。
1. 高斯模糊去噪
在处理任何边缘检测任务之前,首先需要降低图像噪声。噪声是边缘检测中的一个大问题,因为高频噪声可以被误识别为边缘。
- 实现:使用
cv2.GaussianBlur()函数应用高斯滤波。该函数将图像与高斯核卷积,核的大小(5x5)和标准差(0.5)决定了滤波的程度。高斯滤波能有效平滑图像,减少分析过程中梯度算子响应于噪声的机率。
2. 梯度计算
边缘可以在图像的亮度突变处被检测到,这些位置通过计算图像的梯度幅度来识别。
- 实现:使用
cv2.Sobel()函数计算x和y方向的梯度。这个函数计算指定方向的一阶导数,帮助我们确定每个像素点梯度的大小和方向。
3. 非极大值抑制
得到梯度幅度和方向后,接下来的任务是仅保留构成边缘的关键像素,这通过非极大值抑制实现。
- 实现:在每个像素点,检查它在梯度方向上是否为局部最大值。如果是,则保留该点作为边缘点,否则抑制(设为0)。这一步骤确保边缘是尽可能细的。
4. 双阈值检测与边缘跟踪
为了区分真正的边缘和噪声,Canny使用了两个阈值:高阈值和低阈值。强边缘(高于高阈值)直接被保留,弱边缘(介于两个阈值之间)则需要进一步处理。
- 实现:
np.pad()用于给边缘矩阵周围添加一层,防止索引越界。trace()函数递归地访问每个弱边缘像素的8个邻域像素,如果邻域像素的梯度大于低阈值,则认为是真正的边缘。这一递归过程保证了边缘的连续性。
5. 边缘完成与可视化
最后,我们将检测到的边缘映射回原图像尺寸,并使用matplotlib进行可视化。
- 实现:在最终的
plt.imshow()中,原始图像和检测到的边缘被并排展示,这有助于直观地比较边缘检测前后的效果。
完整的Python代码示例:
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 设置相关的参数
HT = 200 # 高阈值用于高阈值检测
LT = 100 # 低阈值用于低阈值检测
# 读取图片文件,转换为灰度图像
filename = 'ima.jpeg'
src = cv2.imread(filename)
dst = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
# 使用高斯模糊进行去噪处理
blur_dst = cv2.GaussianBlur(dst, (5, 5), 0.5)
# 使用Sobel算子计算x和y方向上的梯度
dx = cv2.Sobel(blur_dst, cv2.CV_16S, 1, 0)
dy = cv2.Sobel(blur_dst, cv2.CV_16S, 0, 1)
# 计算梯度幅度和方向
M = abs(dx) + abs(dy)
theta = np.arctan2(dy, dx)
# 非极大值抑制
M_supp = np.zeros(M.shape)
for i in range(1, M.shape[0]-1):
for j in range(1, M.shape[1]-1):
angle = theta[i, j] / np.pi
mag = M[i, j]
# 根据梯度方向进行非极大值抑制
if abs(angle) <= 1/8 or abs(angle) > 7/8:
if mag > M[i, j-1] and mag > M[i, j+1]:
M_supp[i, j] = mag
elif abs(angle-1/2) <= 1/8 or abs(angle + 1/2) <= 1/8:
if mag > M[i-1, j] and mag > M[i+1, j]:
M_supp[i, j] = mag
elif abs(angle-3/4) <= 1/8 or abs(angle+1/4) <= 1/8:
if mag > M[i-1, j-1] and mag > M[i+1, j+1]:
M_supp[i, j] = mag
# 双阈值处理与边缘跟踪
M_supp = np.pad(M_supp, ((1,1), (1,1)), 'constant', constant_values=0)
edge = np.zeros(M_supp.shape, dtype=np.uint8)
def trace(M_supp, edge, i, j, LT):
if edge[i, j] == 0 and M_supp[i, j] > LT:
edge[i, j] = 255
for di, dj in [(-1, -1), (-1, 0), (-1, 1), (0, -1), (0, 1), (1, -1), (1, 0), (1, 1)]:
trace(M_supp, edge, i + di, j + dj, LT)
for i in range(1, M_supp.shape[0]-1):
for j in range(1, M_supp.shape[1]-1):
if M_supp[i, j] >= HT:
trace(M_supp, edge, i, j, LT)
# 去除外侧补的0
edge = edge[1:-1, 1:-1]
# 可视化结果
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(src, cv2.COLOR_BGR2RGB))
plt.title('Original Image')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(edge, cmap='gray')
plt.title('Edge Detection')
plt.axis('off')
plt.show()
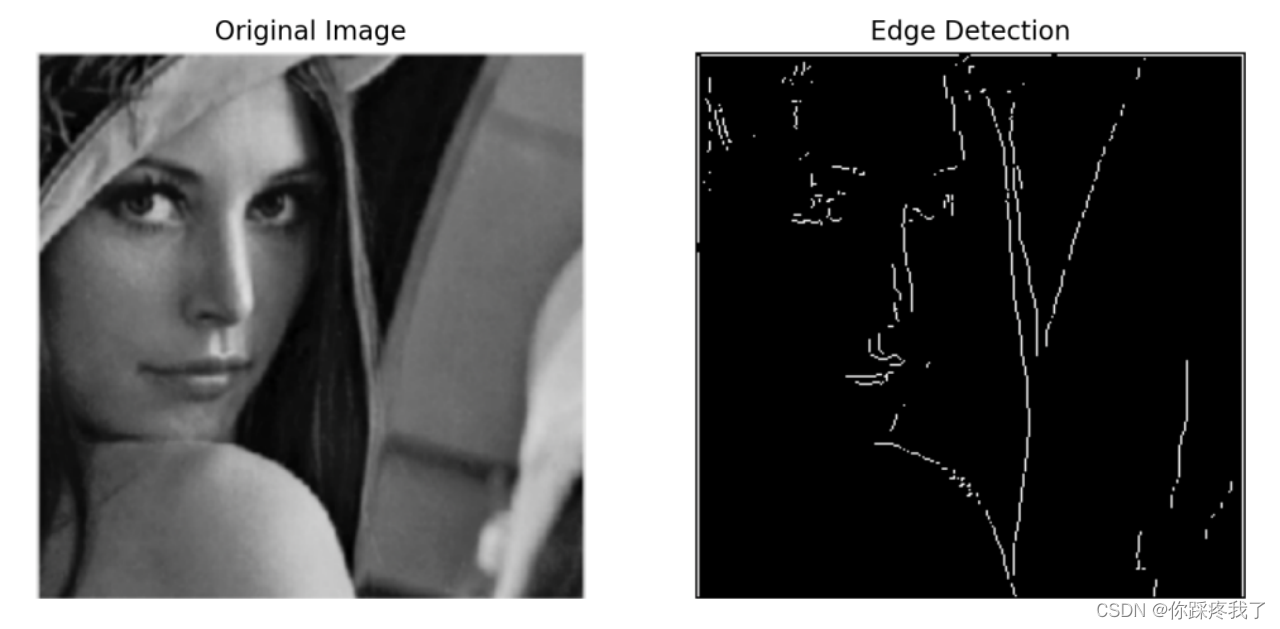
结果:
四、总结
通过以上详细的分析和代码示例,我们得以深入理解Canny边缘检测算法的工作原理和实际应用。从基本的噪声抑制到复杂的边缘跟踪技术,Canny算法的每一步都是为了实现更精确、更可靠的边缘检测。无论是通过OpenCV的内置函数快速实现,还是通过手动编程深入每一个细节,Canny算法都证明了其在图像处理中的有效性和效率。
Canny边缘检测算法是图像处理领域的一个基石,广泛用于各种应用,从简单的图像编辑到复杂的机器视觉系统。通过本文的探讨和示例,我们可以看到,适当的参数调整和理解算法的内部机制对于优化结果至关重要。此外,实际应用中可能需要根据特定的图像特性和需求进行算法调整,以达到最佳的检测效果。
希望这些解析能帮助你更好地掌握Canny边缘检测技术,并在未来的项目中有效利用这一强大的工具。

















 7939
7939

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









