






本文档目的为将TI的DEMO板方案及其对应例程进行简单解析,分析其程序框架。
一、PWM设置
1、电路为两路LLC交错并联。
2、第一路LLC原边用ePWM1驱动,副边用ePWM2驱动。
3、第二路LLC原边用ePWM4驱动,副边用ePWM5驱动。
4、四个ePWM是同步的,同步源都来自ePWM1的计数器归零时刻。

二、ADC设置
1、F2837x内部有4路独立ADC;
2、各路采样信号的触发源设置的不同,分别来自ePWM3,ePWM2和ePWM5。
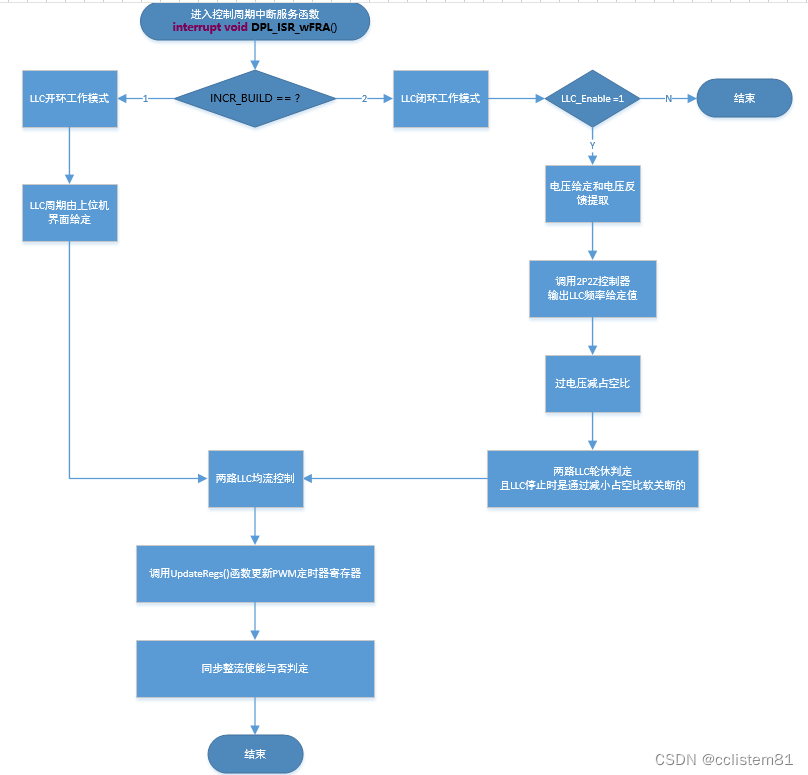
三、算法中断
1、控制算法中断周期为20us,中断源为ePWM3。
2、在此中断服务函数中执行控制算法:
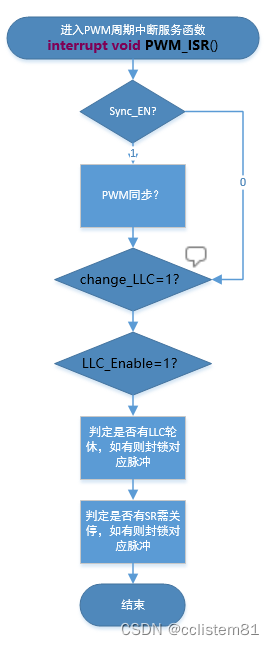
四、高速中断
1、高速中断源自ePWM1
2、在此中断中,软件强制改变ePWM输出状态。
3、只有标志位change_llc = 1时,表示LLC的状态出现了变化,才进入此中断服务函数,来对PWM输出状态进行快速关停/开启。
五、背景状态机
1、除了上述两个中断外,还有一个任务调用状态机在后台执行。
2、此状态机轮流调用A0、B0、C0任务。
3、A0任务中会调用A1或A2任务,两个任务轮流调用,本次进入A0,调用A1,下次再进入A0,则调用A2,如此往复。
4、B0任务中有B1、B2、B3三个任务轮流调用
5、C0任务中有C1、C2两个任务轮流调用

参考文档:
1、F2803xD技术参考手册
2、F2803xD用户手册
3、双路交错LLC DEMO板用户手册《TIDUCT9.pdf》















 7737
7737











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









