






1.关键函数VideoWriter的使用方法介绍
VideoWriter 是 MATLAB 中用于创建和写入视频文件的函数。它允许你将一系列图像帧保存为视频文件。以下是 VideoWriter 函数的基本使用方法和详细说明:
创建 VideoWriter 对象
首先,你需要创建一个 VideoWriter 对象,指定输出视频文件的名称、格式以及其他属性。
matlab
复制代码
v = VideoWriter('output.avi', 'MPEG-4');
在上面的例子中,output.avi 是输出视频文件的名称,'MPEG-4' 是指定的视频压缩格式。MATLAB 支持多种视频格式,你可以根据需要选择合适的格式。
设置视频属性
创建 VideoWriter 对象后,你可以设置视频的各种属性,如帧率、帧大小等。
matlab
复制代码
v.FrameRate = 30; % 设置帧率为 30 帧/秒
你可以根据需要设置其他属性,如 Quality、BitRate 等。具体可设置的属性取决于你选择的视频格式和编码器。
打开 VideoWriter 对象
在开始写入帧之前,你需要打开 VideoWriter 对象。
matlab
复制代码
open(v);
写入帧
现在你可以将图像帧写入视频文件了。你可以使用循环来逐个写入帧,或者一次性写入所有帧。
matlab
复制代码
for k = 1:n % n 是帧的总数
% 生成或获取第 k 帧的图像数据,假设存储在变量 img 中
img = getFrame(k); % 这是一个假设的函数,你需要用实际的方法获取帧图像
writeVideo(v, img); % 将帧写入视频文件
end
注意:在上面的代码中,getFrame(k) 是一个假设的函数,用于获取第 k 帧的图像数据。你需要用实际的方法来获取或生成帧图像。另外,writeVideo(v, img) 是将帧写入视频文件的正确方法,但在 MATLAB 中实际上应该使用 writeFrame 函数,如下所示:
matlab
复制代码
writeFrame(v, img); % 将帧写入视频文件(正确的函数名)
关闭 VideoWriter 对象
当你完成所有帧的写入后,记得关闭 VideoWriter 对象以释放资源并完成视频文件的保存。
matlab
复制代码
close(v);
完整示例代码
下面是一个完整的示例代码,演示了如何使用 VideoWriter 函数创建一个简单的视频文件:
matlab
复制代码
% 创建 VideoWriter 对象并设置属性
v = VideoWriter('output.avi', 'MPEG-4'); % 指定输出文件名和格式
v.FrameRate = 30; % 设置帧率为 30 帧/秒(可根据需要调整)
open(v); % 打开 VideoWriter 对象以准备写入数据
% 生成并写入一些示例帧(这里使用随机数据作为示例)
for k = 1:100 % 假设有 100 帧(可根据需要调整)
img = rand(240, 320, 3) * 255; % 生成一个随机的 240x320 RGB 图像帧(可根据需要调整大小和数据类型)
img = uint8(img); % 转换为 uint8 数据类型以符合常见的图像格式要求(可根据实际情况调整)
writeFrame(v, img); % 将生成的帧写入视频文件
end
% 关闭 VideoWriter 对象并完成视频文件的保存
close(v); % 关闭对象并释放资源(这一步很重要,不要忘记执行)
2.完整MATLAB代码教学
clear all;clc;close all;
% 下面是一个简化的示例代码,展示了如何实现上述步骤:
% 步骤1: 编写卡尔曼滤波函数
% 步骤2: 准备模拟数据
true_states = sin((1:100)') + 0.1 * randn(100, 1); % 真实状态
observations = true_states + 0.5 * randn(100, 1); % 观测值
% 步骤3: 运行卡尔曼滤波
Q = 0.1; % 过程噪声协方差
R = 0.5; % 观测噪声协方差
initial_state = 0; % 初始状态估计
initial_P = 1; % 初始状态估计误差协方差
[estimates, errors] = kalmanFilter(observations, Q, R, initial_state, initial_P);
% 步骤4: 可视化结果
figure;
plot(1:100, true_states, 'b', 'DisplayName', 'True States');
hold on;
plot(1:100, observations, 'ro', 'DisplayName', 'Observations');
plot(1:100, estimates, 'g', 'DisplayName', 'Kalman Estimates');
hold off;
legend('show');
title('Kalman Filter Estimation');
xlabel('Time Step');
ylabel('State Value');
% 步骤5: 录制视频
videoFileName = 'kalman_filter_demo.mp4';
videoObj = VideoWriter(videoFileName,'MPEG-4');
videoObj.FrameRate = 10; % 设置视频帧率
open(videoObj);
% 录制绘图过程
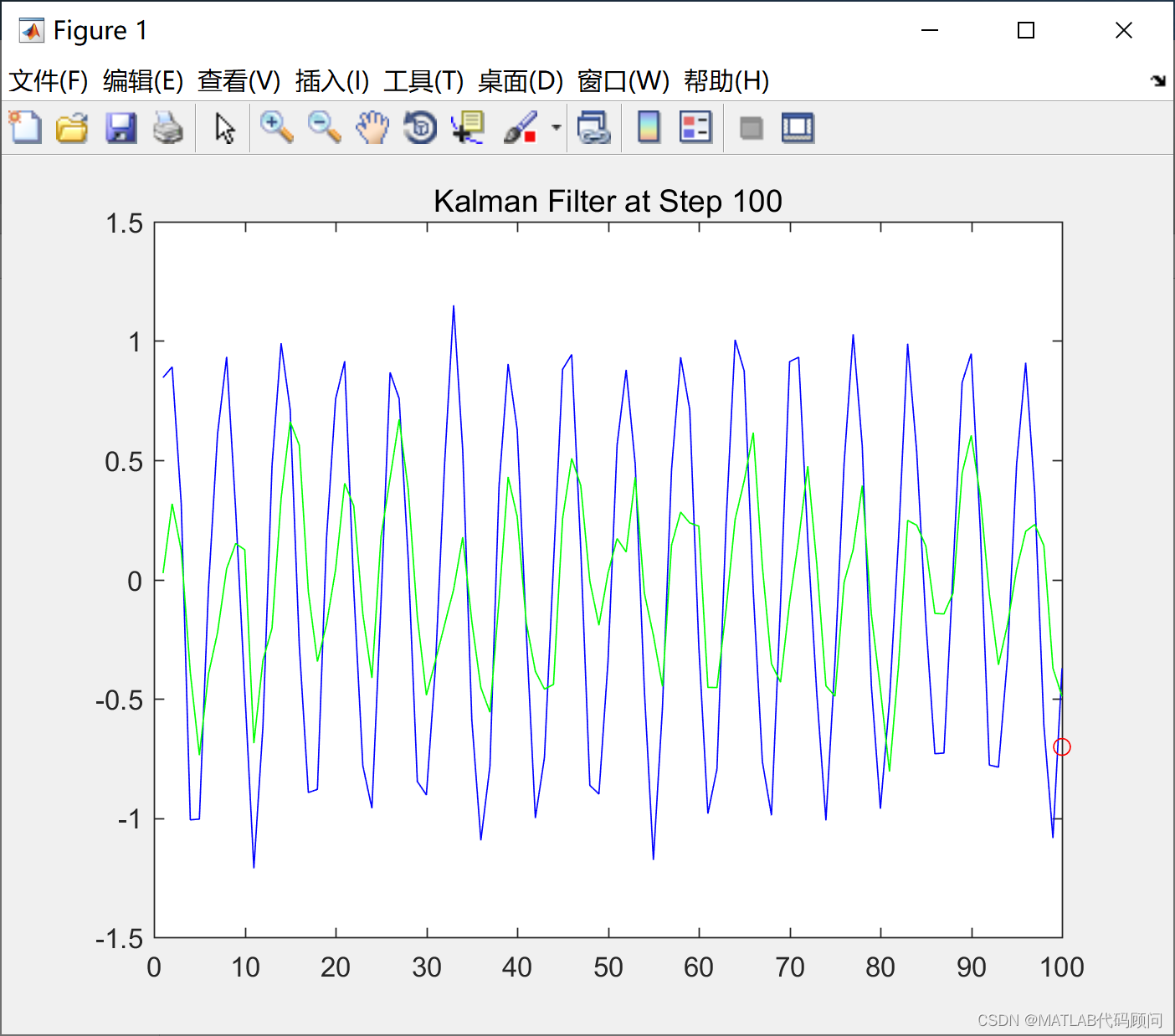
for k = 1:length(true_states)
% 更新绘图
clf;
plot(1:k, true_states(1:k), 'b');
hold on;
plot(k, observations(k), 'ro');
plot(1:k, estimates(1:k), 'g');
hold off;
title(['Kalman Filter at Step ' num2str(k)]);
drawnow;
% 写入视频帧
frame = getframe(gcf);
im = frame2im(frame);
writeVideo(videoObj,im);
end
% 关闭视频文件
close(videoObj);
% 步骤6: 保存和播放视频
disp(['Video saved as ' videoFileName]);
% 播放视频
% videoPlayer = vision.VideoPlayer
function [estimates, errors] = kalmanFilter(observations, Q, R, initial_state, initial_P)
% 初始化
n = length(observations);
estimates = zeros(n, 1);
errors = zeros(n, 1);
x = initial_state;
P = initial_P;
% 卡尔曼滤波循环
for k = 1:n
% 预测
x_pred = x;
P_pred = P + Q;
% 更新
K = P_pred / (P_pred + R);
x = x_pred + K * (observations(k) - x_pred);
P = (1 - K) * P_pred;
% 保存估计值和误差
estimates(k) = x;
errors(k) = x - observations(k);
end
end
kalman_filter_demo



















 1062
1062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











