







【问题描述】
FJ新买的干草打包机的内部结构大概算世界上最混乱的了,它不象普通的机器一样有明确的内部传动装置,而是N个齿轮互相作用,每个齿轮都可能驱动着多个齿轮。
FJ记录了对于每个齿轮i,记录了它的3个参数:X,Y,R,(X,Y)表示齿轮中心的位置坐标;R表示该齿轮的半径。驱动齿轮的位置为0,0,并且FJ也知道最终的工作齿轮位于(a,b)。
驱动齿轮顺时针转动,转速为10,000转/小时。你的任务是,确定传动序列中所有齿轮的转速。传动序列的定义为,能量由驱动齿轮传送到工作齿轮的过程中用到的所有齿轮的集合。对能量传送无意义的齿轮都应当被忽略。在一个半径为Rd,转速为S转/每小时的齿轮的带动下,与它相接的半径为Rx的齿轮的转速将为-S*Rd/Rx转/小时。S前的负号的意思是,一个齿轮带动的另一个齿轮的转向会与它的转向相反。
FJ只对整个传动序列中所有齿轮速度的绝对值之和感兴趣,你的任务也就相应转化成求这个值。机器中除了驱动齿轮以外的所有齿轮都被另外某个齿轮带动,并且不会出现2个不同的齿轮带动同一个齿轮的情况。
【输入格式】
第1行: 3个用空格隔开的整数:N,a,b。
第2..N+1行: 第i+1描述了齿轮i的位置及半径:X,Y,以及R。
【输出格式】
第1行: 输出所有在传动中起到作用的齿轮转速的绝对值,包括驱动齿轮和工作齿轮。
【输入样例】
4 32 54
0 0 10
0 30 20
32 54 20
-40 30 20
【输出样例】
20000
【样例解释】
所以齿轮转速绝对值之和:10000+|-5000|+5000=20,000。
【数据范围】
2 <= N <= 1050
-5000 <= X,Y <= 5000
FJ新买的干草打包机的内部结构大概算世界上最混乱的了,它不象普通的机器一样有明确的内部传动装置,而是N个齿轮互相作用,每个齿轮都可能驱动着多个齿轮。
FJ记录了对于每个齿轮i,记录了它的3个参数:X,Y,R,(X,Y)表示齿轮中心的位置坐标;R表示该齿轮的半径。驱动齿轮的位置为0,0,并且FJ也知道最终的工作齿轮位于(a,b)。
驱动齿轮顺时针转动,转速为10,000转/小时。你的任务是,确定传动序列中所有齿轮的转速。传动序列的定义为,能量由驱动齿轮传送到工作齿轮的过程中用到的所有齿轮的集合。对能量传送无意义的齿轮都应当被忽略。在一个半径为Rd,转速为S转/每小时的齿轮的带动下,与它相接的半径为Rx的齿轮的转速将为-S*Rd/Rx转/小时。S前的负号的意思是,一个齿轮带动的另一个齿轮的转向会与它的转向相反。
FJ只对整个传动序列中所有齿轮速度的绝对值之和感兴趣,你的任务也就相应转化成求这个值。机器中除了驱动齿轮以外的所有齿轮都被另外某个齿轮带动,并且不会出现2个不同的齿轮带动同一个齿轮的情况。
【输入格式】
第1行: 3个用空格隔开的整数:N,a,b。
第2..N+1行: 第i+1描述了齿轮i的位置及半径:X,Y,以及R。
【输出格式】
第1行: 输出所有在传动中起到作用的齿轮转速的绝对值,包括驱动齿轮和工作齿轮。
【输入样例】
4 32 54
0 0 10
0 30 20
32 54 20
-40 30 20
【输出样例】
20000
【样例解释】
机器里一共有4个齿轮,位于0,0的是半径为10的驱动齿轮,它带动了位于0,30的,半径为20的某个齿轮。这个齿轮又间接带动了位于32,54,半径为20的工作齿轮,以及一个位于-40,30,半径同样为20的冗余的齿轮。
如下表所示:
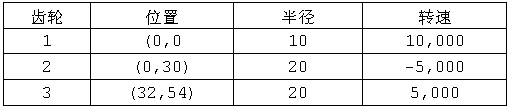
所以齿轮转速绝对值之和:10000+|-5000|+5000=20,000。
【数据范围】
2 <= N <= 1050
-5000 <= X,Y <= 5000
3 <= R_i <= 800
题目不难,关键是如何建立两个齿轮间的关系。从而计算出总的转速和。
思考建图,给每一个齿轮按照输入的顺序依次编号,然后依次比较每两个齿轮之间的位置关系,如果相切则引一条无向边(因为能量可以在两个齿轮之间传导)
由于题目中从驱动齿轮到工作齿轮的路径是唯一的,所以从工作齿轮开始bfs一次计算出工作齿轮和齿轮i的最短距离dist[i],然后从驱动齿轮开始bfs,如果从i扩展到的结点满足
dist[i]-dist[j]==1就继续扩展,一边扩展一边算答案Ans。
#include<cstdio>
#include<iostream>
#include<cstdlib>
#include<algorithm>
#include<queue>
#include<vector>
#include<cstring>
#include<cmath>
#include<cctype>
using namespace std;
const int maxn = 1200;
typedef long long LL;
int n,a,b,E,S;
double Ans;
struct data//记录每个齿轮的属性
{
int x,y,r;
}p[maxn];
vector<int>g[maxn];
int dist[maxn],vis[maxn];
void bfs()//从工作齿轮开始计算dist[i]
{
queue<int>q;
q.push(E);
vis[E]=1;
dist[E]=0;
while(!q.empty())
{
int i=q.front();q.pop();
for(int k=0;k<g[i].size();k++)
{
int j=g[i][k];
if(vis[j])continue;
vis[j]=1;
dist[j]=dist[i]+1;
q.push(j);
}
}
}
struct data2//记录每个齿轮的id号和速度
{
int id;
double v;
};
void bfs2()
{
memset(vis,0,sizeof(vis));
queue<data2>q;
q.push((data2){S,10000});
vis[S]=1;
Ans=10000;
while(!q.empty())
{
data2 t=q.front();q.pop();
data2 tt;
int i=t.id;
for(int k=0;k<g[i].size();k++)
{
int j=g[i][k];
if(vis[j])continue;
if(dist[i]-dist[j]!=1)continue;
vis[j]=1;
tt.id=j;
tt.v=-t.v*p[t.id].r/p[tt.id].r;
Ans=Ans+abs(tt.v);//累加答案
q.push(tt);
}
}
printf("%d\n",(int)Ans);
}
int main()
{
//freopen("baler.in","r",stdin);
//freopen("baler.out","w",stdout);
scanf("%d%d%d",&n,&a,&b);
for(int i=1;i<=n;i++)
{
int X,Y,R;
scanf("%d%d%d",&X,&Y,&R);
p[i].x=X;
p[i].y=Y;
p[i].r=R;
if(X==0 && Y==0)//找到了动力齿轮
{
S=i;
}
if(X==a && Y==b)//找到了工作齿轮
{
E=i;
}
}
for(int i=1;i<=n;i++)
for(int j=1;j<=n;j++)if(i!=j)
{
LL t1=(p[i].r+p[j].r)*(p[i].r+p[j].r);
LL t2=(p[i].x-p[j].x)*(p[i].x-p[j].x)+(p[i].y-p[j].y)*(p[i].y-p[j].y);
if(t1==t2)//判断相切 如果相切就连一条边
{
g[i].push_back(j);
g[j].push_back(i);
}
}
bfs();
bfs2();
return 0;
}














 837
837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









