









一、准备物品
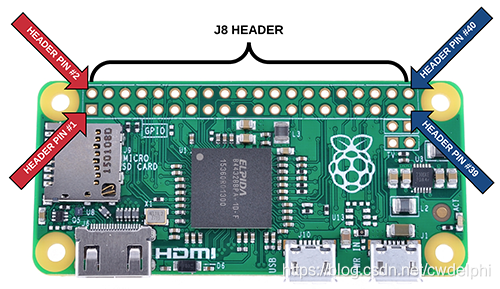
1. 树莓派ZeroWH(针脚焊接) (100元)

2. DC电池盒(2节装)(1元)

3. 18650锂电池2节(10元)
4. 小水泵(3元)

5. 继电器(3元)

6. 红外避障传感器(2元)

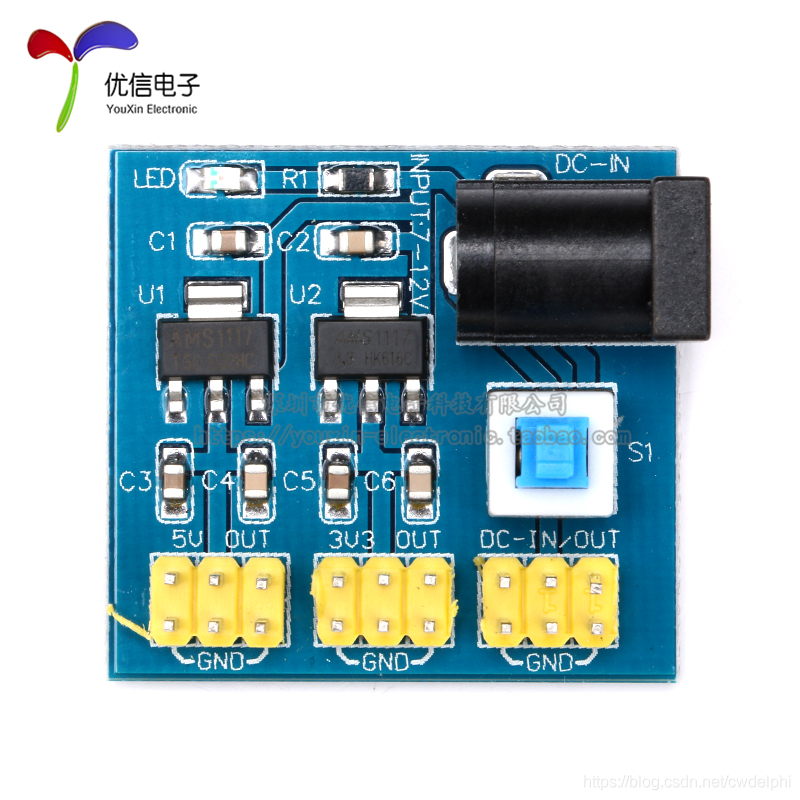
7. 多路DC-DC电压转换模块电源 12V转3.3/5/12V(2元)
8. 杜邦线若干(10元)

9. 斐讯N1小LINUX服务器(100元) 
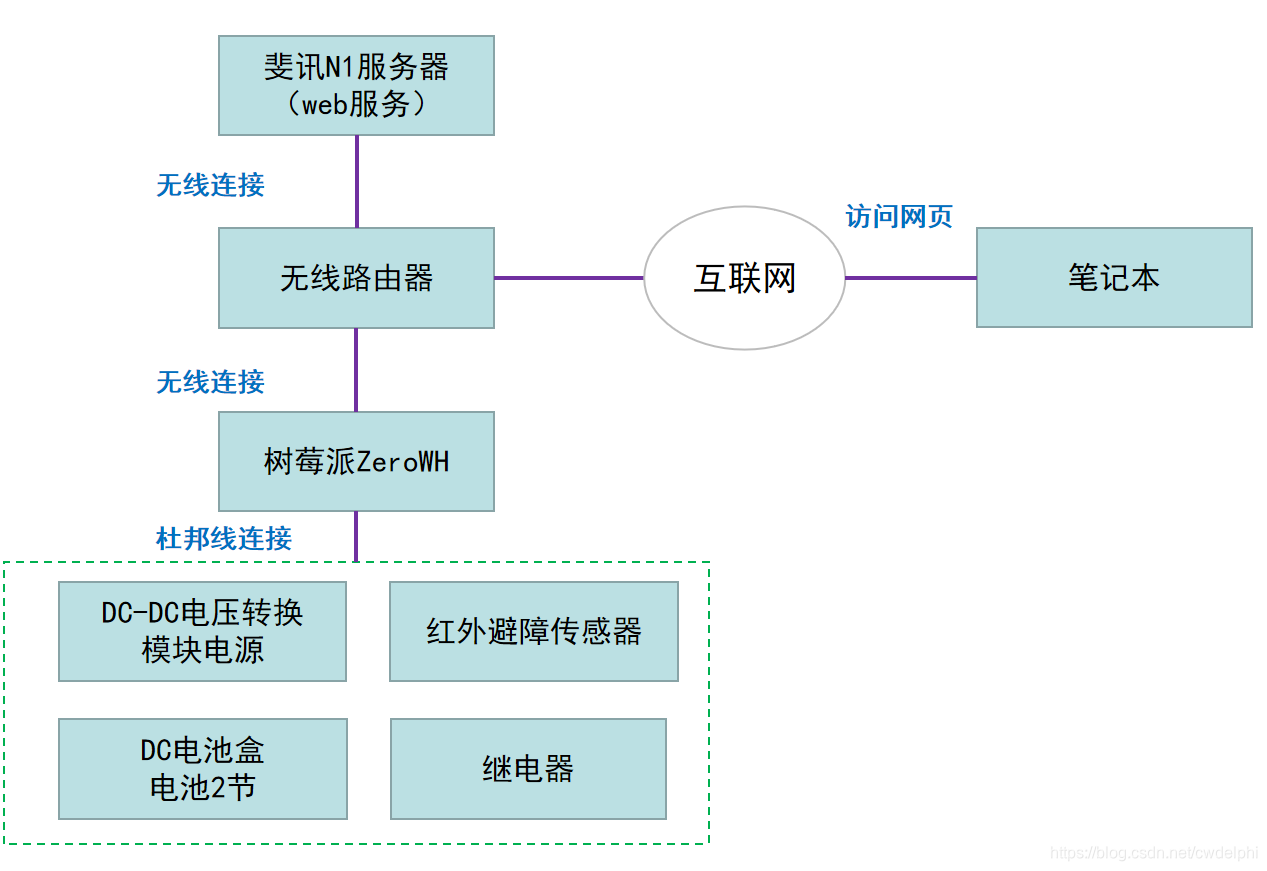
二、总体设计
三、硬件接线
| 树莓派ZeroWH | 红外避障传感器 | 继电器 | 多路DC-DC电压转换模块电源 |
|---|---|---|---|
| BCM18 | – | VIN | – |
| BCM23 | OUT | – | – |
| GND | – | – | GND |
| 红外避障传感器 | 多路DC-DC电压转换模块电源 |
|---|---|
| V3.3 | V3.3 |
| GND | GND |
| 继电器 | 多路DC-DC电压转换模块电源 |
|---|---|
| V3.3 | V3.3 |
| GND | GND |
| 继电器 | 水泵 | 多路DC-DC电压转换模块电源 |
|---|---|---|
| COM | – | 5V |
| NO | 5V | – |
| – | GND | GND |
四、程序代码
4.1 服务器代码
CREATE TABLE IF NOT EXISTS `warter_log` (
`id` int(11) NOT NULL,
`warter_time` datetime NOT NULL DEFAULT current_timestamp()
) ENGINE=InnoDB AUTO_INCREMENT=2 DEFAULT CHARSET=utf8mb4;
const Koa = require("koa");
const serve = require("koa-static");
const router = require("koa-router")();
const app = new Koa();
var knex = require('knex')({
client: 'mysql',
connection: {
host : 'xxx',
port : 3360,
user : 'root',
password : 'xxx',
database : 'cjy'
},
debug: true,
pool: {
min: 0,
max: 3,
},
acquireConnectionTimeout: 10000,
});
app.use(serve(__dirname + "/webroot"));
router.get('/t', async (ctx, next) => {
ctx.response.body = "hello world!";
})
//添加取水记录
router.get('/warter_count', async (ctx, next) => {
try{
itemList = await knex('warter_log').insert({})
ctx.response.body = itemList;
}catch(e){
console.log(e);
}
})
//获取取水时间记录列表
router.get('/warter_logs', async (ctx, next) => {
try{
let itemList = await knex.select('*').from('warter_log').orderBy([
{ column: 'id', order: 'desc' }
]);
ctx.response.body = itemList;
}catch(e){
console.log(e);
}
})
app.use(router.routes());
app.listen(6060);
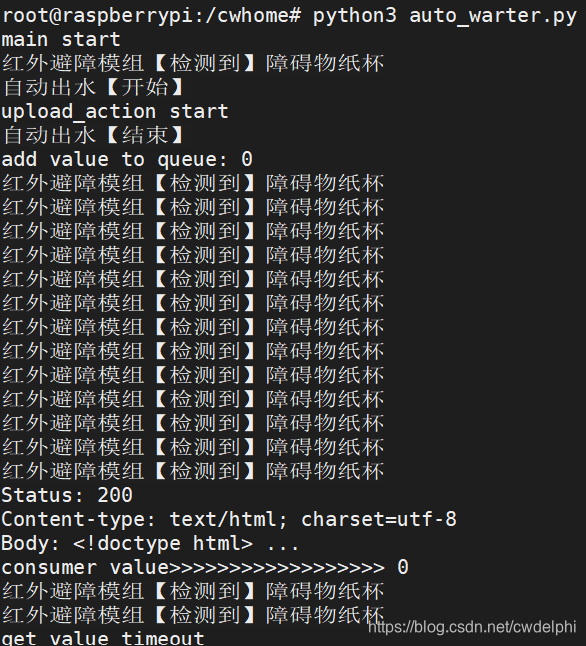
4.2 树莓派ZeroWH代码
#!/usr/bin/python3
# encoding:utf-8
import RPi.GPIO as GPIO
import asyncio
import aiohttp
class cjy_automatic_water_dispenser:
def __init__(self, loop=None):
self._queue = asyncio.Queue(loop=loop)
self._future = asyncio.Future(loop=loop)
#提交自动饮水时间记录
async def upload_action(self):
print("upload_action start")
upload_url = 'http://cwn1.f3322.net:6060/warter_count'
while True:
try:
r = await asyncio.wait_for(self._queue.get(), timeout=1.0)
async with aiohttp.ClientSession() as session:
async with session.get('http://python.org') as response:
print("Status:", response.status)
print("Content-type:", response.headers['content-type'])
html = await response.text()
print("Body:", html[:15], "...")
# r = await self._queue.get()
print('consumer value>>>>>>>>>>>>>>>>>>', r)
except asyncio.TimeoutError as e1:
print('get value timeout')
continue
except Exception as e2:
print(e2)
break
print('quit')
#自动饮水服务
async def main(self):
print("main start")
#放水计数
v = 0
#接水位置最后一次水杯状态:1--存在水杯,0--不存在水杯
zb_state = 0
#树莓派ZeroWH采用BCM模式定义引脚
GPIO.setmode(GPIO.BCM)
#红外传感器检测是否有水杯的数字引脚
pin_avoid_obstacle=23
#连接水泵的继电器控制引脚
pin_reply = 18
#设置红外传感器连接引脚为上拉电阻,数字信号输入模式
GPIO.setup(pin_avoid_obstacle, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
#设置水泵继电器连接引脚,数字信号输出模式
GPIO.setup(pin_reply, GPIO.OUT)
#每隔0.5秒检测一次红外探头检测范围内是否放置了物体
while True:
status = GPIO.input(pin_avoid_obstacle)
if status == 1:
print('红外避障模组【没有检测到】障碍物纸杯')
zb_state = 0
#设置水泵处于关闭状态
GPIO.output(pin_reply, GPIO.HIGH)
else:
print('红外避障模组【检测到】障碍物纸杯')
if zb_state == 0:
zb_state = 1
print("自动出水【开始】")
#打开水泵,控制引脚低电平时打开
GPIO.output(pin_reply, GPIO.LOW)
#水泵放水0.5秒
await asyncio.sleep(0.5)
#关闭水泵,控制引脚高电平时关闭
GPIO.output(pin_reply, GPIO.HIGH)
print("自动出水【结束】")
print('add value to queue:',str(v))
await self._queue.put(v)
v = v + 1
else:
pass
#休眠0.5秒
await asyncio.sleep(0.5)
async def run(self):
asyncio.ensure_future(self.main())
asyncio.ensure_future(self.upload_action())
if __name__ == '__main__':
loop = asyncio.get_event_loop()
cawd = cjy_automatic_water_dispenser(loop=loop)
#将自动饮水服务加入协程
asyncio.ensure_future(cawd.run())
#进入事件循环
try:
loop.run_forever()
except KeyboardInterrupt as e:
print(asyncio.Task.all_tasks())
for task in asyncio.Task.all_tasks():
print(task.cancel())
loop.stop()
loop.run_forever()
finally:
loop.close()
#清除树莓派所有引脚状态
GPIO.cleanup()
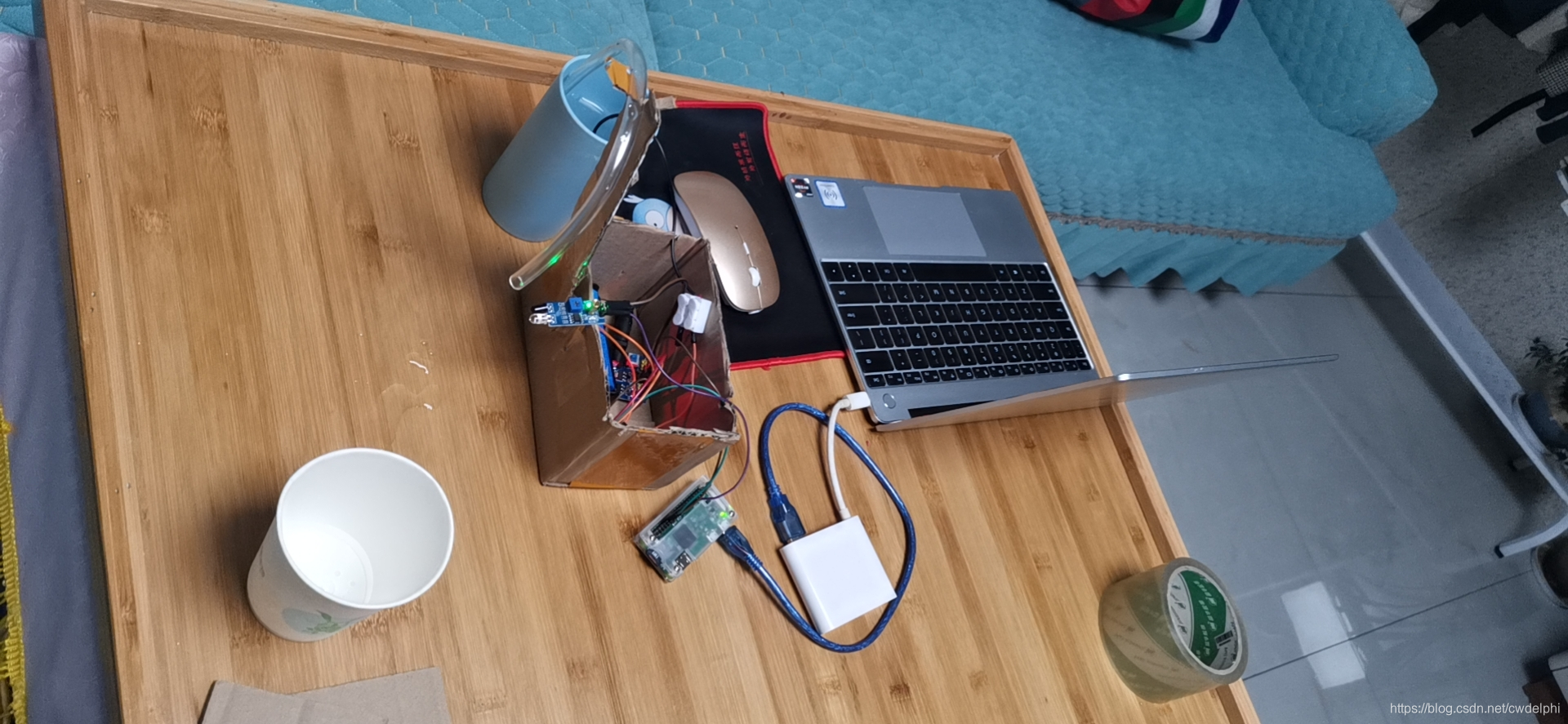
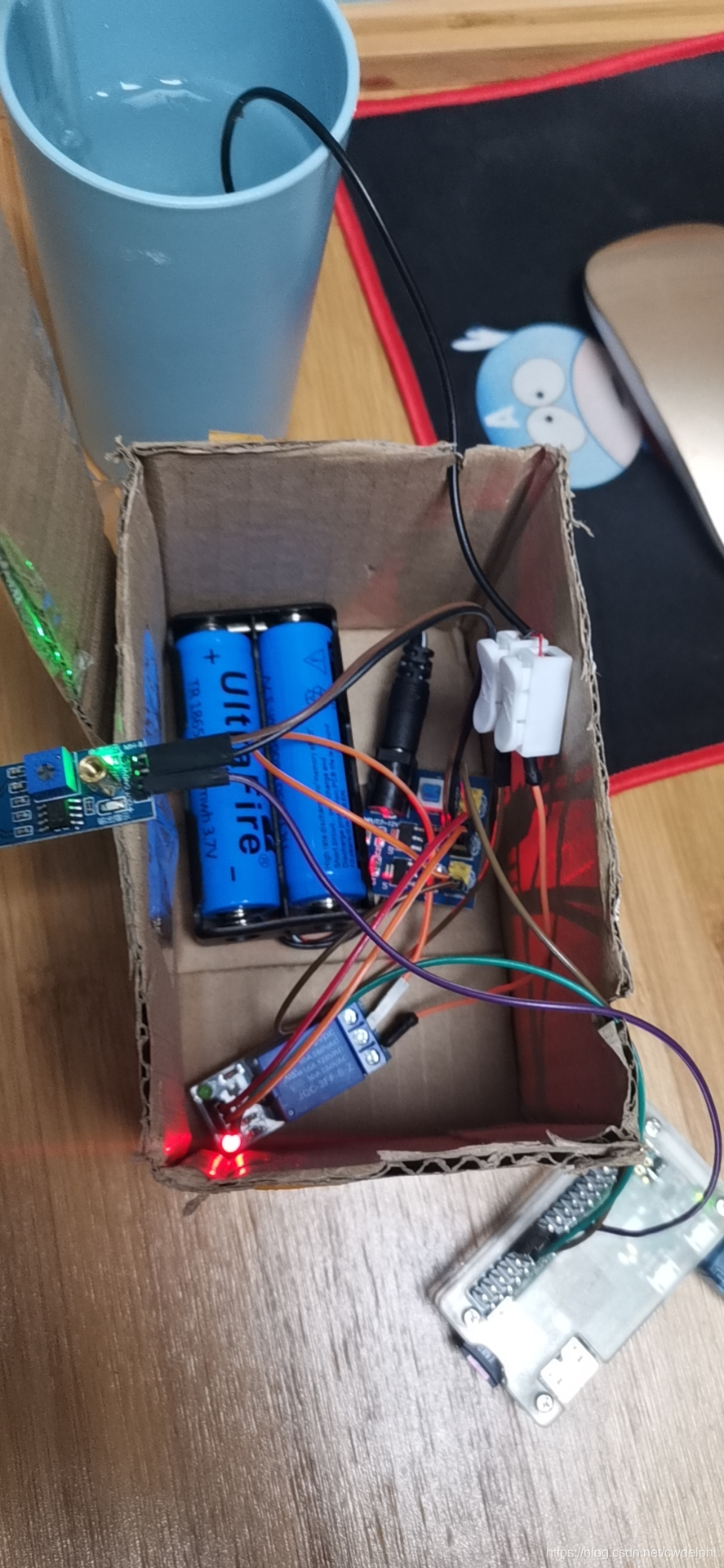
五、成果展示
六、关键技术小代码
6.1 协程入门(python3.7+)
import asyncio
async def main():
print('Hello ...')
await asyncio.sleep(1)
print('... World!')
# Python 3.7+
asyncio.run(main())
6.2 生产者消费者模型(python3.7+)
import asyncio
class Test(object):
def __init__(self, loop=None):
self._queue = asyncio.Queue(loop=loop)
self._future = asyncio.Future(loop=loop)
async def _producer(self, interval):
v = 0
while True:
await asyncio.sleep(interval)
print('add value to queue:',str(v))
await self._queue.put(v)
v = v + 1
async def _consumer(self):
while True:
try:
r =await asyncio.wait_for(self._queue.get(), timeout=1.0)
# r = await self._queue.get()
print('consumer value>>>>>>>>>>>>>>>>>>', r)
except asyncio.TimeoutError:
print('get value timeout')
continue
except:
break
print('quit')
async def run(self):
asyncio.ensure_future(self._producer(2))
asyncio.ensure_future(self._consumer())
if __name__ == '__main__':
loop = asyncio.get_event_loop()
t = Test(loop=loop)
asyncio.ensure_future(t.run())
try:
loop.run_forever()
except KeyboardInterrupt as e:
print(asyncio.Task.all_tasks())
for task in asyncio.Task.all_tasks():
print(task.cancel())
loop.stop()
loop.run_forever()
finally:
loop.close()
6.3 水泵继电器代码(python3+)
import RPi.GPIO as GPIO
import time
if __name__ == '__main__':
GPIO.setmode(GPIO.BCM)
pin_reply = 23
GPIO.setup(pin_reply, GPIO.OUT)
#水泵放水3秒
GPIO.output(pin_reply, GPIO.HIGH)
time.sleep(3)
GPIO.output(pin_reply, GPIO.LOW)
GPIO.cleanup()
6.4 红外障碍检测代码(python3+)
import RPi.GPIO as GPIO
import time
if __name__ == '__main__':
pin_avoid_obstacle=18
GPIO.setmode(GPIO.BCM)
GPIO.setup(pin_avoid_obstacle, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
try:
while True:
status = GPIO.input(pin_avoid_obstacle)
if status == 1:
print('我是红外避障模组,没有检测到障碍物,一切正常!')
else:
print('我是红外避障模组,检测到障碍物,注意停车')
time.sleep(0.5)
except KeyboradInterrupt:
GPIO.cleanup()
6.5 HTTP客户端请求
import aiohttp
import asyncio
async def main():
async with aiohttp.ClientSession() as session:
async with session.get('http://python.org') as response:
print("Status:", response.status)
print("Content-type:", response.headers['content-type'])
html = await response.text()
print("Body:", html[:15], "...")
loop = asyncio.get_event_loop()
loop.run_until_complete(main())

















 471
471

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









