







 本文通过实例详细介绍了如何在ROS中自定义消息类型,并使用Python进行Publisher和Subscriber的编写。涵盖了从简单字符串消息到复杂自定义消息的处理,以及基于turtlesim的示例,展示了ROS消息通信的核心概念。
本文通过实例详细介绍了如何在ROS中自定义消息类型,并使用Python进行Publisher和Subscriber的编写。涵盖了从简单字符串消息到复杂自定义消息的处理,以及基于turtlesim的示例,展示了ROS消息通信的核心概念。
自定义ROS消息,编写python pub+sub样例
1 前言
这篇文章是本人上篇博客的姊妹篇: 自定义ROS消息,编写C++ pub+sub样例
见博客名可知,本文主要讲解使用python编写ros pub和sub样例,参考资料也是一样的:
(1)《机器人操作系统(ROS)浅析》[美] Jason M. O’Kane 著 肖军浩 译,第3,5和6章
(2)ros Tutorials 初级教程的10~12节
本系列博客汇总:ROS高效入门系列。
2 正文
2.1 第一个ros程序,hello_ros
(1)创建软件包hello_ros和文件
cd ~/catkin_ws/src/python/
catkin_create_pkg hello_ros std_msgs rospy roscpp
cd hello_ros
mkdir launch scripts
touch launch/start.launch scripts/hello.py
(2)编写hello.py,CMakeLists.txt,start.launch
hello.py:
#! /usr/bin/env python3
import rospy
def main():
// 相当于cpp中的ros::init+ros::NodeHandle
rospy.init_node("hello_ros")
rospy.loginfo("hello ros")
if __name__ == "__main__":
main()
CMakeLists.txt:
cmake_minimum_required(VERSION 3.0.2)
project(hello_ros)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
catkin_package()
include_directories(${catkin_INCLUDE_DIRS})
// 这句是必须要加的,不然hello.py无法安装出来,自然也执行不了
catkin_install_python(PROGRAMS
scripts/hello.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
start.launch
<launch>
<node
pkg="hello_ros"
type="hello.py"
name="hello_ros"
required="true"
output="screen"
/>
</launch>
(3)编译并运行(即使是python版,也是要编译的)
cd ~/catkin_ws/
catkin_make --source src/python/hello_ros/
source devel/setup.bash
roslaunch hello_ros start.launch
2.2 最简单的pub+sub样例,收发一个string
(1)创建simple_pub_sub软件包和文件
cd ~/catkin_ws/src/python
catkin_create_pkg simple_pub_sub std_msgs rospy roscpp
mkdir launch scripts
touch launch/start.launch scripts/pub.py scripts/sub.py
(2)编写pub.py,sub.py,CMakeLists.txt,start.launch
pub.py:
#! /usr/bin/env python3
import rospy
from std_msgs.msg import String
def main():
rospy.init_node("sim_pub")
// 建立pub句柄,第一个参数是topic的相对名,第二个是类型,第三个是缓存队列长度
pub = rospy.Publisher("chatter", String, queue_size=10)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
msg = String()
msg.data = "hello ycao %s" %rospy.get_time()
pub.publish(msg)
rospy.loginfo(msg.data)
rate.sleep()
if __name__ == "__main__":
main()
sub.py:
#! /usr/bin/env python3
import rospy
from std_msgs.msg import String
def msg_cb(msg):
tmp_str = "%s: i received %s" %(rospy.get_caller_id(), msg.data)
rospy.loginfo(tmp_str)
def main():
rospy.init_node("sim_sub")
// 建立sub句柄,第三个参数是回调函数
rospy.Subscriber("chatter", String, msg_cb)
// 这里的spin与cpp中的不一样,它只是不让节点推出,跟是否调用回调函数没有关系
// 而且,rospy没有spinonce()方法
rospy.spin()
if __name__ == "__main__":
main()
CMakeLists.txt:
cmake_minimum_required(VERSION 3.0.2)
project(simple_pub_sub)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
catkin_package()
include_directories(${catkin_INCLUDE_DIRS})
catkin_install_python(PROGRAMS
scripts/pub.py scripts/sub.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
start.launch
<launch>
<node
pkg="simple_pub_sub"
type="pub.py"
name="sim_pub"
respawn="true"
output="screen"
/>
<node
pkg="simple_pub_sub"
type="sub.py"
name="sim_sub"
respawn="true"
output="screen"
/>
</launch>
(3)编译并执行
cd ~/catkin_ws
catkin_make --source src/python/simple_pub_sub/
source devel/setup.bash
roslaunch simple_pub_sub start.launch
2.3 自定义msg,写pub+sub测试
(1)创建msg_self软件包,和相应文件
cd ~/catkin_ws/src/python
catkin_create_pkg msg_self message_generation rospy roscpp message_runtime
mkdir launch scripts msg
touch launch/start.launch scripts/pub.py scripts/sub.py msg/Student.msg
(2)编写Student.msg,pub.py,sub.py, CMakeLists.txt,start.launch
Student.msg
string name
uint8 age
pub.py
#! /usr/bin/env python3
import rospy
from msg_self.msg import Student
def main():
rospy.init_node("msg_pub")
pub = rospy.Publisher("student", Student, queue_size=10)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
s1 = Student()
s1.name = "jieshoudaxue"
s1.age = 30
pub.publish(s1)
rospy.loginfo("send s1, name = %s, age = %d" %(s1.name, s1.age))
rate.sleep()
if __name__ == "__main__":
main()
sub.py
#! /usr/bin/env python3
import rospy
from msg_self.msg import Student
def stu_cb(stu):
rospy.loginfo("%s: i received s1, name = %s, age = %d" %(rospy.get_caller_id(), stu.name, stu.age))
def main():
rospy.init_node("msg_sub")
rospy.Subscriber("student", Student, stu_cb)
rospy.spin()
if __name__ == "__main__":
main()
CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(msg_self)
find_package(catkin REQUIRED COMPONENTS
message_generation
roscpp
rospy
)
add_message_files(
FILES
Student.msg
)
generate_messages(
DEPENDENCIES
std_msgs # Or other packages containing msgs
)
catkin_package(
CATKIN_DEPENDS message_runtime roscpp rospy
)
include_directories(
${catkin_INCLUDE_DIRS}
)
catkin_install_python(PROGRAMS
scripts/pub.py scripts/sub.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
start.launch
<launch>
<node
pkg="msg_self"
type="pub.py"
name="msg_pub"
respawn="true"
output="screen"
/>
<node
pkg="msg_self"
type="sub.py"
name="msg_sub"
respawn="true"
output="screen"
/>
</launch>
(3)编译并运行
cd ~/catkin_ws/
catkin_make --source src/python/msg_self/
source devel/setup.bash
roslaunch msg_self start.launch
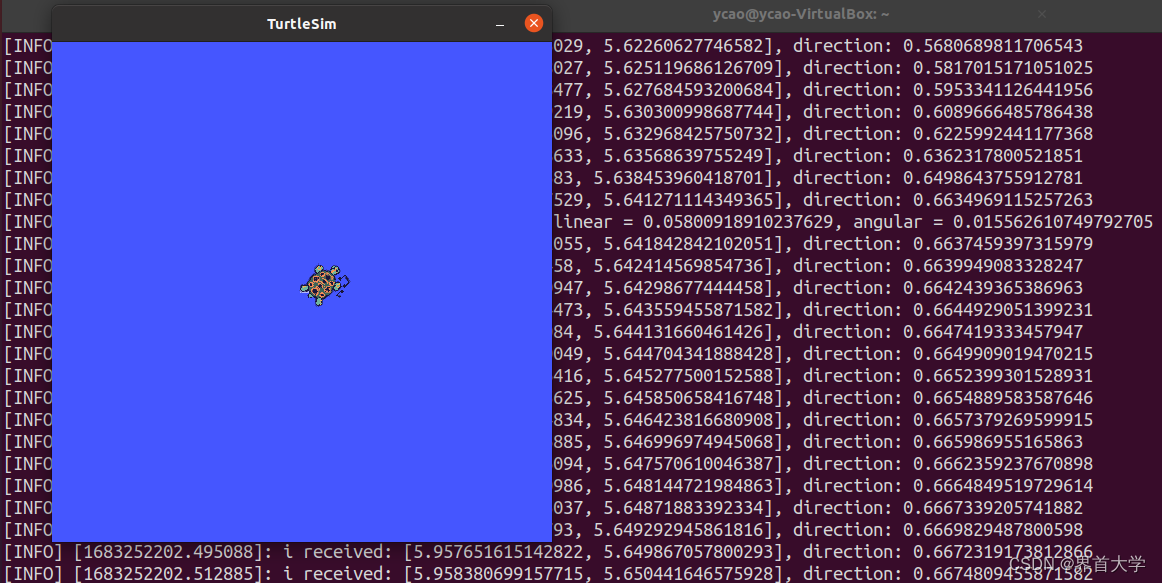
2.4 基于turtlesim,写一个复杂点的pub+sub
(1)创建handle_turtlesim软件包,其依赖turtlesim,内部有一个pub节点,用来向turtlesim发送随机运动命令,另一个sub节点,订阅turtlesim发出来的位置信息,并打印出来。
cd ~/catkin_ws/src/python
catkin_create_pkg handle_turtlesim turtlesim geometry_msgs rospy roscpp
mkdir launch scripts
touch launch/start.launch scripts/pub.py scripts/sub.py
(2)编写pub.py,sub.py, CMakeLists.txt, start.launch
pub.py
#! /usr/bin/env python3
import rospy
import random
from geometry_msgs.msg import Twist
def main():
rospy.init_node("pub_velocity")
pub = rospy.Publisher("turtle1/cmd_vel", Twist, queue_size=10)
rate = rospy.Rate(2)
while not rospy.is_shutdown():
msg = Twist()
msg.linear.x = random.random()
msg.angular.z = random.random()
pub.publish(msg)
rospy.loginfo("sending rand velocity cmd: linear = %s, angular = %s" %(msg.linear.x, msg.angular.z))
rate.sleep()
if __name__ == "__main__":
main()
sub.py
#! /usr/bin/env python3
import rospy
from turtlesim.msg import Pose
def pose_cb(msg):
rospy.loginfo("i received: [%s, %s], direction: %s" %(msg.x, msg.y, msg.theta));
def main():
rospy.init_node("sub_pose")
rospy.Subscriber("turtle1/pose", Pose, pose_cb)
rospy.spin()
if __name__ == "__main__":
main()
CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(handle_turtlesim)
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
turtlesim
)
catkin_package(
CATKIN_DEPENDS geometry_msgs roscpp rospy turtlesim
)
include_directories(
${catkin_INCLUDE_DIRS}
)
catkin_install_python(PROGRAMS
scripts/pub.py scripts/sub.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
start.launch
<launch>
<node
pkg="turtlesim"
type="turtlesim_node"
name="turtlesim"
respawn="true"
/>
<node
pkg="handle_turtlesim"
type="pub.py"
name="pub_velocity"
respawn="true"
output="screen"
/>
<node
pkg="handle_turtlesim"
type="sub.py"
name="sub_pose"
required="true"
output="screen"
/>
</launch>
(3)编译并运行
cd ~/catkin_ws
catkin_make --source src/python/handle_turtlesim/
source devel/setup.bash
roslaunch handle_turtlesim start.launch
3 总结
本文中的例子放在了本人的github上: ros_src。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











