



软体与柔性机器人在医疗应用中的最新进展综 述
1. 引言
机器人在医疗领域的应用可以追溯到几十年前,但近年来软材料在医疗机器人中的使用赋予了新的能力,为医疗治疗创造了新的可能性。更安全的人机交互是首选。软体医疗机器人被定义为具有高柔韧性的柔软灵活机电系统,用于执行医疗应用。软体医疗机器人是多学科交叉的新兴技术,如材料科学、仿生学、力学、电子学和计算机科学。目前,软体医疗机器人已被用于外科手术、诊断、康复、假肢、人工器官、药物递送以及许多其他医疗应用。弯曲、扭转、伸展和接触操作等运动要求软体医疗机器人具有高柔韧性和可变形性。
软体医疗机器人在医疗应用中表现出不同程度的柔韧性。本文中的柔韧性用于描述软体医疗机器人在科学层面具有适当的刚度和顺应性组合的特性。实际上,柔韧性体现在三个方面:形态的多样性、刚度的广泛范围以及施加的适当作用力。软体医疗机器人必须能够在大范围内调节其柔韧程度,以充分执行各项任务。例如,在微创手术(MIS)应用中,长期以来一直需要能够移动、变形、穿越狭窄间隙并与柔软器官相互作用的软体医疗机器人。同时,为了实现组织牵拉、肿瘤切除或缝合等操作,又需要具备适当的刚度。肌肉在其被动状态(高顺应性/低刚度)与主动状态(低顺应性/高刚度)之间表现出不同程度的柔韧性。同样,软体医疗机器人也采用类似的方法来施加作用力并调节其承载能力。如何有效地实现不同级别的柔韧性属于工程层面的问题。本文所探讨的科学问题是软体医疗机器人柔韧性的机制与理论,其柔韧性的影响因素有哪些,以及这些因素如何产生影响?这些问题实际上是主要的本文的重点。这些特性将支持实际应用,不仅实现高顺应性和机动性,还能实现可控姿态和一定的输出扭矩。完全软体机器人将无法执行一系列操作。为研究这一科学问题并实现一定程度的柔韧性,实际上面临的挑战在于工程支持中的可变性和可控性。因此,有必要首先研究和总结软体医疗机器人的柔韧性。对于软体医疗机器人而言,柔韧性可以通过使用具有内在适应特性的材料(如橡胶、织物、聚合物复合材料、和弹性体)来实现,该方法已被提出用于实现安全交互,而无需额外的传感或复杂控制。软体医疗机器人的许多优良特性源于其构造材料的低杨氏模量。由于软体医疗机器人所用材料与生物软组织相似,其功能可通过仿生设计方法模仿软体动物的运动模式来实现。在此基础上,主动柔顺性实现使软体医疗机器人能够在保持操作精度的同时安全地与患者身体交互,并提供足够的力以完成操作任务。
本文讨论了软体与柔性机器人在医疗应用方面的最新进展,包括仿生学、柔性驱动、传感、智能控制算法以及可调刚度。随后,对柔韧性相关的有前景的研究方向进行了概述和描述,并在最后一部分对本综述进行了总结。
2. 仿生学在软体医疗机器人中的应用
对于软体医疗机器人,科学家通常从自然中获得灵感,并且生物软体结构已被长期研究。软体医疗机器人在功能上模仿生物体,其材料和结构特性与模型生物相似,但刚性机器人难以达到这种相似程度。目前,基于仿生技术的软体医疗机器人主要应用于微创手术、药物递送和康复。
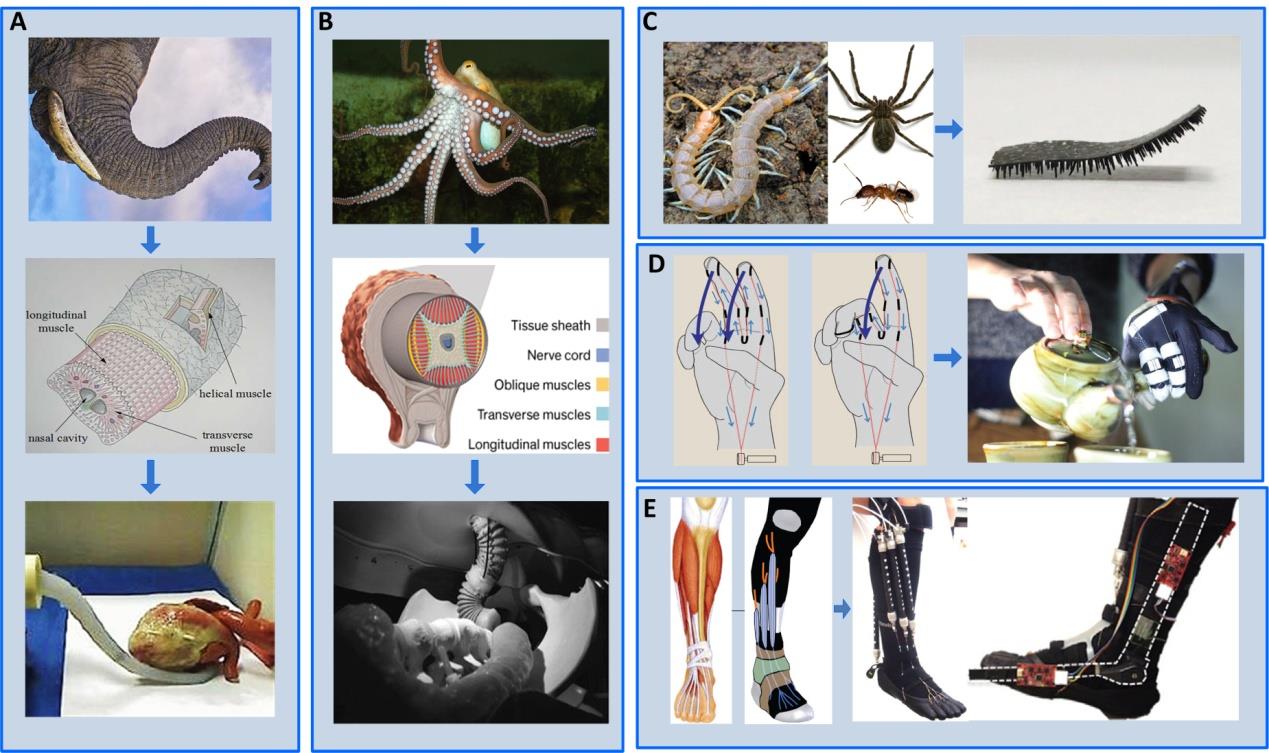
软体医疗机器人的设计灵感大多来源于软体生物的驱动行为,例如蚯蚓、舌头、象鼻、水母和章鱼臂。这些生物都具有一种相同的生物结构,称为“肌肉液压静力系统”,该术语由基尔在 1985中提出,用于描述一类软体动物结构。由于肌肉液压静力系统主要由肌肉组织构成,且无骨骼支撑,具有不可压缩性,因此其体积在变形过程中能够保持不变。通过肌肉组织的排列方式,肌肉液压静力系统能够快速实现任意方向的伸长和弯曲,从而适应人体内的复杂或狭窄环境,并灵活安全地执行操作。受象鼻结构特性的启发,邓T等人设计了一种新型绳索驱动软体内窥镜系统,用于以微创方式实施心脏消融(图1A)。该机器人由对称圆柱结构组成,主要由硅橡胶制成,并包含八根无磨损纤维绳。当拉动不同的缆绳时,机器人会呈现出多种形态,如弯曲、S形、蠕动和收缩。在欧盟STIFF‐FLOP项目资助下,来自伦敦国王学院和圣安娜高等学院的研究人员通过分析章鱼臂的生物形态,并研究其在微创手术(MIS)中应用的可行性后,提出了这种创新外科机器人的设计(图1B)。该机器人本质上是一个弹性圆柱体,内部嵌有三个呈径向排列且间距相等的流体腔室。当腔室内的压力发生变化时,机器人将执行不同的运动。此外,一些研究人员还受到蛇的启发,蛇的运动模式为多种用于微创手术的软体医疗机器人设计提供了灵感。
郝建L等人开发了一种带有锥形足部结构的软体医疗机器人,用于人体内的药物递送,并受到动物柔软且有弹性的腿部/足部结构的启发。该设计与软材料无缝集成为仿生结构(图1C)。机器人本体采用一种名为聚二甲基硅氧烷(PDMS)的硅材料制成,使其能够通过电磁力进行控制。当施加磁场时,软锥形足发生变形并呈现多种形式,以适应人体复杂环境。

人们既关注辅助性可穿戴机器人的功能,也关注其外观。可穿戴机器人应轻便且紧凑。许多软材料(如织物)可使系统变得轻薄。受人手启发,首尔国立大学设计了一款由织物带制成的柔性可穿戴手部机器人 Exo‐Glove,该机器人采用软性肌腱导向系统和欠驱动自适应机制(图1D)。类似地,受人脚和小腿启发,卡内基梅隆大学提出了一种由气动人工肌肉执行器驱动的用于踝足康复的柔性可穿戴机器人装置。该装置模仿人体肌肉‐肌腱‐韧带结构的形态和功能,以实现多种自然的踝关节运动(图1E)。
自然界中的软体结构可以展现软体医疗机器人的潜在能力。它们通过改变身体形状来实现高柔韧性。以这些特性为主要参考,软体医疗机器人的仿生软结构被设计成可变形,以便更好地适应人体复杂环境。对自然生物形态和功能的进一步理解,可以为软体医疗机器人带来新的设计理念。基于这一理念,仿生学无疑是软体医疗机器人未来发展的重要方向之一。
3. 柔性驱动
理论上,软体医疗机器人在其柔性部件上具有分布式的变形,从而实现无限的自由度。柔性驱动用于提供动力以实现柔性功能和预期工作。因此,能够产生高作用力的柔性驱动系统的设计对于软体医疗机器人具有重要意义。目前,软体医疗机器人的柔性驱动主要分为三种类型:1. 物理驱动,即基于物理场效应直接驱动作为机体一部分的可变形智能材料,此类执行器旨在将驱动与机体集成;2. 柔性流体驱动器(FFAs),指具有柔性结构并由流体(气动或液压)驱动的执行器,使用惰性流体(空气或生理盐水)使其在医疗应用中具有本质上的安全性;3. 肌腱驱动执行器(TDAs),主要用于康复。
3.1 形状记忆合金(SMA)执行器
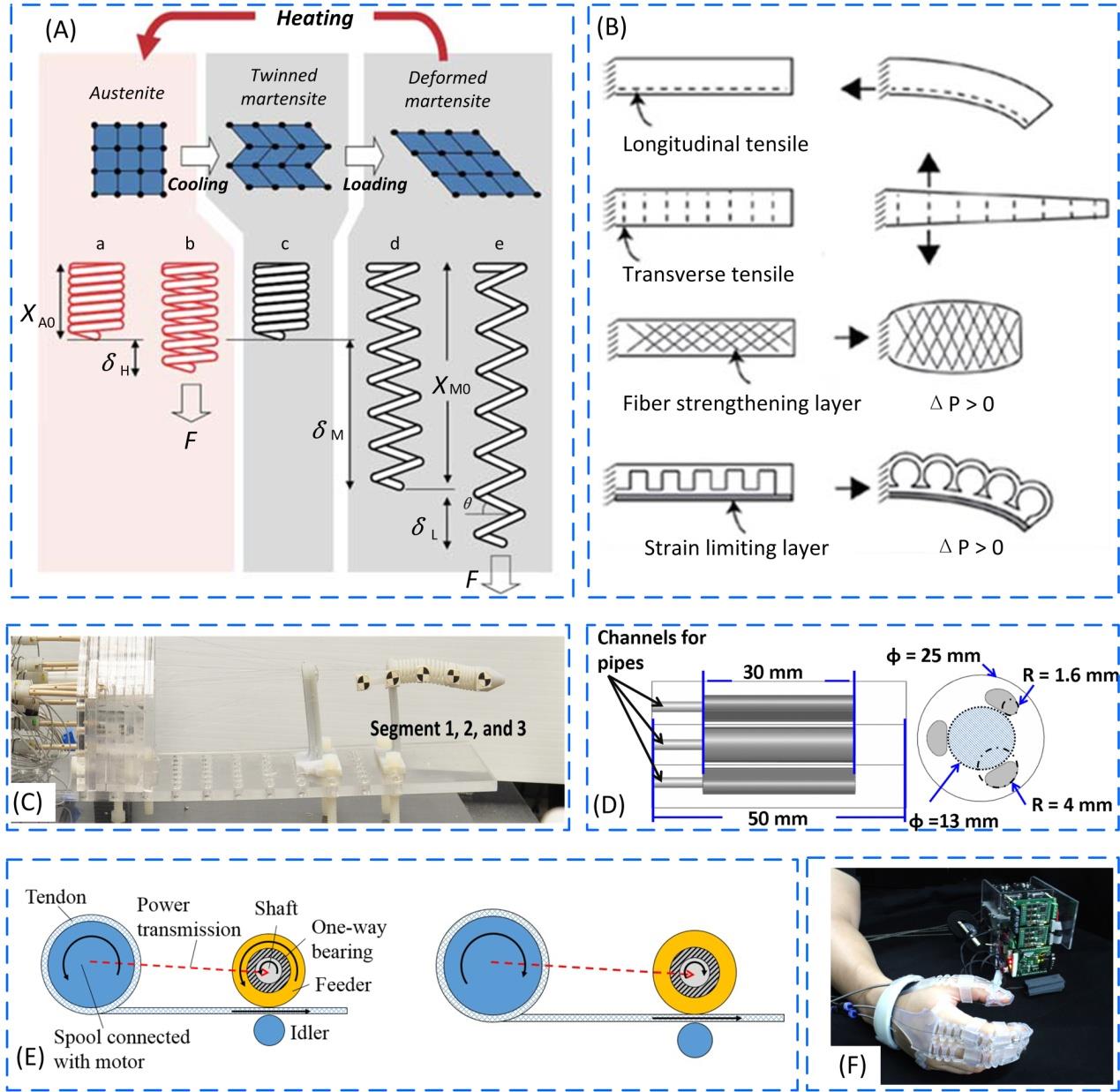
形状记忆合金是一种智能材料,在外力作用下易于变形并表现出一定的被动柔韧性。当加热至相变温度以上时,形状记忆合金将恢复其原始形状。形状记忆合金具有高能量密度,能够施加局部力,并且可以被加工成多种形状和尺寸。此外,由于其优异的性能,如生物相容性、高耐腐蚀性和非磁性行为,已被广泛应用。形状记忆合金执行器通常采用形状记忆合金元件(弹簧或丝材)作为执行器的换能材料。镍钛诺因其超弹性而成为最常用的形状记忆合金元件。
金永jin等人设计了基于弹簧的软体医疗机器人MINIR‐II,用于神经外科。该机器人通过3D打印制造,并采用SMA弹簧驱动器。此外,配备MRI引导的机器人使外科医生能够追踪并确定机器人相对于脑肿瘤靶点的实时位置。Dorin C 等人提出了一种用于肘关节康复的软体医疗机器人,该机器人由SMA丝状执行器驱动。形状记忆合金执行器不仅被探索用于外科或康复治疗程序,还被应用于导管类操作。一些导管、主动式内窥镜胶囊和微型外科工具已被开发出来。同时,SMA执行器也可应用于软体辅助装置中,以促进踝关节背屈,例如Leia和SHADE。
然而,由于形状记忆合金的力生成依赖于温度变化,在不同热环境下实现稳定的温度控制是一项巨大的挑战。大部分输入能量被用于加热形状记忆合金本身,因此其效率非常低(仅1%)。此外,过热或过度应变容易导致形状记忆合金执行器损坏。
3.2 柔性流体驱动器(FFAs)
流体驱动人工肌肉(FFAs)通过加压流体或压缩空气驱动,在相对于环境空气的正压下使弹性体材料膨胀。格尔博尼G等人基于3自由度圆柱体流体驱动人工肌肉( FFAs)设计了一种用于微创手术(MIS)的模块化软体机械手。这些流体驱动人工肌肉本质上是在弹性体材料的圆柱体中创建的三个空腔,可根据特定手术操作的需求,交替施加压力以弯曲圆柱体,或同时施加压力以延长圆柱体。Roche E T 等人开发了一种基于气动人工肌肉(PAMs)的人工心脏。该人工心脏为使用硅胶制成,其特性与心肌相似。采用多层设计以模拟心脏心肌纤维的两层外层结构。以螺旋和环向结构排列的气动人工肌肉可复制心脏运动,同时提供同步机械辅助。
流体驱动人工肌肉(FFAs),例如气动人工肌肉(PAMs)、流体弹性体驱动器(FEA)以及广受欢迎的麦吉本执行器,已被用于支持行走康复中的踝关节和髋关节康复,驱动气动磁共振兼容针具以及多种外科手术器械和操纵器。Otherlab Orthotics是一家市场导向的私营研究公司,提出了一种新型的动力矫形器,采用FFAs(使用空气或水)帮助老年人或残疾人实现站立、行走并完成某些任务。
在一系列用于软体医疗机器人的新兴驱动方法中,流体驱动人工肌肉在手术应用方面具有高潜力。由流体驱动人工肌肉驱动的软体医疗机器人由于无需使用电力,因此可在存在放射性和磁场的环境中进行操作。然而,流体驱动人工肌肉需要外部驱动动力源,这使得构建无束缚气动医疗机器人或完全柔软的系统具有挑战性。
3.3 肌腱驱动执行器 (TDAs)
肌腱驱动执行器(TDAs)通过拉动肌腱(缆绳)来驱动软体医疗机器人弯曲或扭转。肌腱可以提供类似肌肉的功能,而TDAs可以通过仅使用几个小型锚点实现远程定位。这些特性使系统具有耐磨性。包含TDAs的柔性可穿戴机器人是一项有前景的技术,可使可穿戴机器人具备紧凑且轻便。
玄基等设计了一款无织物的肌腱驱动型柔性可穿戴机器人手Exo‐Glove Poly。出于卫生考虑,采用了硅胶代替织物。提出了多种形状设计和导线路径,以确定手掌上的导线路径。TDAs也可用于实现由软材料制成的假手的手指屈曲。
肌腱驱动方法重量轻且易于微型化,但存在灭菌问题和机械限制,例如疲劳、非线性摩擦,回程迟滞和力传递不足。
现有技术的各种特性限制了其在医疗应用中的实用性,例如形状记忆合金执行器的效率低(1%)和应变小(10%),以及流体驱动人工肌肉和TDAs需要外部压缩机和压力调节组件,且易受粘滑或回差问题的影响。图2展示了软体医疗机器人中几种典型执行器的示例和原理。表1列出了几种用于软体医疗机器人的柔性执行器。
| 方法 | 特性 |
|---|---|
| 物理执行器 | 柔性流体执行器 (流体驱动 人工肌肉) |
| 肌腱驱动 执行器(TDAs) | 子组 SMA 麦吉本执行器;气动 人工肌肉 (PAMs); 流体的弹性体执行器 (FEAs) _ |
| 使用的材料 | 镍钛诺 纤维编织层;合成的 弹性体薄膜 缆绳 |
| 工作 原理 | 热驱动变化在 晶体结构,导致 形状变化 使用压缩空气或液体 来改变弹性体 腔体积,该体积被 转换为 into特定 运动 肌腱表现出非常低 如果被拉动时的弯曲刚度 远程使用,且经常被使用 在柔性可穿戴机器人中 |
| 缩放的 尺寸 | High 中/低,主要因为 液压/气动泵 _ |
| 响应 速度 | 中/低 中/高 中/高 |
| 应变 | 导线:很低; 弹簧:高 High Low |
| 应力 | 导线:高; 弹簧:中/低 High High |
4. 感知与智能控制算法
4.1 传感
软体医疗机器人的顺应性使得许多传统传感器无法使用,包括编码器、金属或半导体应变计以及惯性测量单元(IMUs)。软体医疗机器人的传感元件必须具有足够的顺应性、弹性和可延展性,以免限制或显著改变软体医疗机器人的特性。目前已有商用柔性传感器,如Flex Sensor®、Flexiforce®、 Bend Sensor®和StretchSense,它们均基于导电材料在应变下发生电阻或电容变化的原理。这些传感器本质上具有柔性,可用于测量嵌入软体医疗机器人软硅胶体后的弯曲、拉伸、应力及其他信息。此外,Thuruthel TG 等提出了一种通用的无模型技术,该技术结合嵌入式软传感器和循环神经网络用于软致动器。然而,传感器的弹性模量通常大于硅胶的弹性模量,这会影响软体医疗机器人的运动。
为了使传感器更好地适应软体医疗机器人的需求,研究人员探索了新材料和加工技术。柔软可拉伸电子器件可能实现新的感知模式。一种有前景的解决方案是引入液态金属(例如汞),以制造在极端弹性变形下仍保持机械完整性和电气功能正常的柔软可拉伸电路。镓铟锡合金、EGaIn(镓铟合金)和液态银)。然而,EGaIn成本较高,且此类微通道的制造及后续填充过程也增加了软体医疗机器人的 fabrication 复杂性。SynTouch 公司设计的 BioTac® 具有先进的人类仿生触觉传感功能,其顺应性与人类指尖极为相似。诸如 trakSTAR、Aurora 和 driveBAY 等商用传感器可嵌入软体医疗机器人的末端执行器中,以检测三维形状信息。
赵等人研制了一种低成本的软体矫形手套,集成了光学应变传感器。该光学弯曲传感器可实时反馈每个手指的运动情况,具有显著优势。还可实现定制化的不一致弯曲轮廓,并具备可调刚度,以提升设备的可用性。西尔 T 等人开发的一种曲率传感系统利用光纤通过光强调制来测量基于磁共振成像的柔性机械臂的弯曲曲率。此外,还设计了一种光纤力传感器,以解决医生在磁共振引导下心脏导管插入术中所面临的力反馈缺失问题。加洛韦 KC 等人提出了一种接近商用的光纤形状传感器(FOSS),用于检测软致动器的形状、环境形状、碰撞位置以及材料刚度特性。
电阻抗断层扫描(EIT)技术,其原理是通过向导电区域注入微小电流并测量边界周围的电势,从而推断该区域的内部结构,已被应用于机器人应用。维森丁 F等人将EIT 技术应用于一种材料,根据施加的力改变其电阻率,并识别这些变化,进而定位受力区域。所有结果均具有前景,为这类传感器的应用开辟了道路。Avery J 提出了一种具有导电工作流体的本体感知(自感知)软致动器。通过最多六个电极测量电抗阻,利用EIT实现断层重建,证明了FDM‐EIT作为软体机器人中低成本形状传感器的潜力。
在上肢系统手套中集成软传感器不应影响整体系统性能。例如,Yeo J C 等人提出了一种用于手部康复的集成解决方案。该方案通过将柔性气动致动器与可拉伸应变传感器集成,形成软传感致动器来实现。这种软传感器在测量应变时具有高灵敏度。为了拓展软体机器人技术的应用,可采用兼容的化学和生物传感器来感知环境信号。这类传感器可能比软体医疗机器人中常用的光学和音频记录仪更适用于软体机器人。
5. 软体医疗机器人中的可调刚度
为了在医疗操作中取代传统工具,软体医疗机器人需要具备极高的顺应性,以进入并到达人体的远端区域。此外,软体医疗机器人需要施加力来完成特定任务,例如,缝合需要2‐6 N的力。从软材料的角度来看,柔韧性的不同程度体现在刚度的变化上。因此,实现软材料的宽范围刚度对软体医疗机器人至关重要。可调刚度使软体医疗机器人在与生物结构交互时能够在施加力和表现顺应性之间转换。此外,通过使用可调刚度机制,软体医疗机器人可以主动与周围结构进行交互。
大多数软体医疗机器人的可调刚度主要可分为以下三种类型。1. 拮抗排列通过增加结构的拮抗性来实现,通常由耦合驱动结构完成。在保持整个系统处于平衡位置的同时,可以驱动单个单元。2. 采用可调刚度材料,其中磁流变液(MRFs)是医疗领域应用最广泛的液体。磁流变液(MRFs)可在液体和固态之间转换。3. 基于阻塞的系统,包括颗粒阻塞和层间阻塞机制可用于已证明能实现刚度大幅变化的方法中。
5.1 拮抗排列
肌肉液压结构具有垂直肌束的特性,这些肌束的同时激活可实现结构刚度的等长增加,如图1 (A, B)所示。在象鼻和章鱼臂中,不同的肌肉群必须相互对抗,因为肌肉只能通过收缩和缩短来产生力。其他研究中也提出了相同原理,即垂直、纵向和横向执行器可独立控制臂的位置和刚度。
软体医疗机器人的刚度在控制柔韧性的拮抗力作用下得到增强。例如,当前受章鱼启发用于微创手术的STIFF‐FLOP机器人原型利用两个力分量来模拟章鱼纵向和横向肌群的共收缩,这些肌群以拮抗方式作用以产生一定程度的刚度。在STIFF‐FLOP早期工作的基础上,Maghooa F 等人开发了一种基于织物的可充气机械手,该机械手由肌腱和气动装置进行拮抗驱动。基于类似的耦合驱动结构,由于存在径向和垂直排列的纤维,流体压力也可被用于手术微操作器以产生旋转运动。
5.2 可调刚度材料
软体机器人领域的最新研究集中在使用可调刚度材料上,实现不同的杨氏模量。通过控制磁场或温度,这些材料可以在液体和固体相之间相互转化。
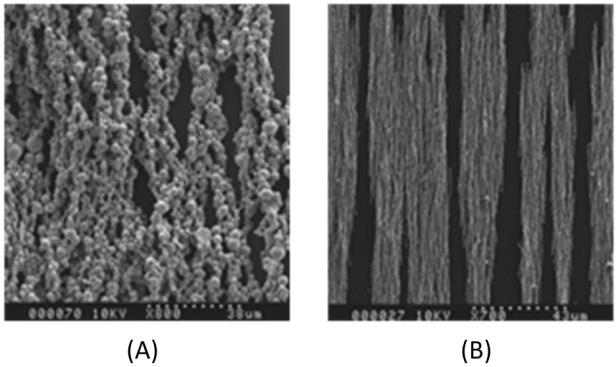
磁流变液(MRFs)是一类可通过调节磁场来改变其流变性能的流体。磁流变液由悬浮在油等载液中的微米级磁性颗粒组成。当流体暴露于磁场中时,颗粒倾向于聚集,如图3所示。这些微观链状结构会产生宏观效应,从而改变流体的表观黏度。随后,流体的粘度增加至形成粘弹性固体的程度。磁流变液已成功应用于机器人应用中的抓取和外骨骼驱动。
Thorsteinsson F 等人设计了一种使用磁流变液来控制刚度的假肢和矫形装置。该装置的刚度可控,并能适应患者的活动水平。磁流变液可实现界面刚度和体积的变化。截肢后患者残肢的体积会发生变化,并且在一天中也会不断变化,这给自适应接受腔的设计带来了巨大挑战。采用具有可调刚度的主动界面可以解决这一问题。
还有许多其他可调刚度材料可用于改变刚度。然而,由于生物相容性和安全性等因素的限制,这些材料很少应用于软体医疗机器人。基于磁流变液的可调刚度是实现阻尼精确控制的一种有前景的方法。然而,其可实现的弹性当这些流体被激活时,模量和屈服强度受到限制。
5.3 基于阻塞的硬化
基于阻塞的硬化在实现可调刚度的方法中展现出许多新的可能性。颗粒阻塞和层间阻塞 recently 被研究作为改变软体医疗机器人刚度的方法。
这些方法基于以下事实:当对柔性材料内部的微小颗粒施加真空时,颗粒会变得非常坚硬。这种现象称为颗粒阻塞,已成功应用于软体医疗机器人。颗粒阻塞方法可分为主动颗粒阻塞和被动颗粒阻塞。
在主动颗粒阻塞中,使用气泵将气体从柔性囊中抽出。当施加真空时,困在柔性囊内的填充颗粒(例如谷物、珠子、咖啡渣)会迅速收缩并硬化。最近,在欧盟委员会FP7计划资助的STIFF‐FLOP项目中,颗粒阻塞技术被应用于软体医疗机器人,并描述了利用该机器人在尸体模型中进行光学视觉引导下的首例尸体系列全直肠系膜切除术(TME)。类似的概念已在医疗领域的软体机械臂中得以实现。李等人将被动颗粒阻塞应用于软体机器人夹持器。该方法没有专有的激活阻塞解决方案,而是通过软致动器的变形被动引起阻塞。软致动器的气压越高,其刚度越大。
颗粒阻塞易于实现,能产生良好的效果,其刚度可在一定范围内任意改变。然而,颗粒阻塞具有一些有趣的特征,例如在类流体状态下具有高变形性,以及在类固态下刚度显著增加而体积无显著变化。为了克服这些问题,研究人员已对采用薄型摩擦材料片的层间阻塞进行了研究,并在小体积内表现出剧烈的刚度变化。与此同时,颗粒阻塞需要大量颗粒材料才能实现显著的刚度变化。在此背景下,层间阻塞技术可能成为比颗粒阻塞更优的替代方案。层间阻塞机制是指通过大面积接触的表面重叠,在施加真空时增加可产生的摩擦力的过程。基于阻塞的硬化的基本原理如图4所示。
基于层间阻塞机制,三星先进技术研究院设计了一种适用于多种微创手术应用的管状蛇形机械臂。当机械臂进入患者体内时,通过低刚度的柔性姿态接触避免对人体造成意外损伤。到达目标位置后,机械臂转换为高刚度状态以满足操作需求。该机械臂的圆柱形结构通过将各层重叠成螺旋形来实现,以最大化层间的摩擦效果。这种层间阻塞方法为微创手术中使用的管状蛇形机械臂留出自定通道,使其可通过管状结构的内腔。通过类似策略,已提出一种基于形状记忆合金横向导线的多层变刚度系统。此外,使用气动执行器也可实现类似效果,其中执行器内的不同层(称为可调刚度层)可被激活以产生不同的最终刚度。
存在几个可调的问题。软体医疗机器人中可调刚度的问题仍有待解决。例如,利用可调刚度材料(如磁流变液)可以提供固有的增强刚度能力;然而,这些材料的使用存在一定的局限性,限制了其在刚度增强鞘中的应用。激活磁流变液需要高电流。此外,这些方法的响应时间导致动态性能低,从而限制了其适用性。软体医疗机器人中的可调刚度如表2所示。
| 特征 | 方法 | 物理现象 | 可控性 | 响应速度 | 刚度变化范围 |
|---|---|---|---|---|---|
| 拮抗排列 | 两个力的分量模拟了纵向肌群的共收缩和章鱼的横向肌群并以拮抗方式作用以产生刚度 | Low,(主要开关) | 高(取决于驱动技术,例如,用于张紧缆绳的电机) | 形状锁定能力由应用高张紧力 | |
| 可调刚度材料 | 通过磁流变液的相变来改变它们在响应磁场 | Low(难以tune刚度) | 毫秒 | 屈服强度100 kPa (239 kA/m磁场) | |
| 基于堵塞的硬化 | 由颗粒间摩擦引起的真空中的密度增加嵌入的柔性膜结构(颗粒状干扰);由a引起的摩擦增加同轴空心圆柱体之间的真空结构中的空心圆柱体(层间阻塞) | 可能,通过控制真空级别 | 高(主要取决于真空系统) | 高变形性在流体状态和剧烈的刚度增加在固态下,没有显著变化在体积上 |
6. 讨论与未来方向
软体医疗机器人将在医疗领域具有重要应用。为了适应不同的医疗任务,需要具备不同程度的柔韧性。本文探讨了软体医疗机器人当前的发展现状,以及这些方法如何影响其在医疗应用中的柔韧性。展现软体医疗机器人柔韧性的仿生材料与结构,是实现临床医疗应用的基本保障。提供动力的柔性驱动、作为精确执行者的智能控制算法,以及软材料广泛的刚度范围,是软体医疗机器人的三个重要因素。表3展示了典型的软体医疗机器人及其基于以下技术的应用进展:仿生学、柔性驱动、感知与智能控制算法以及可调刚度。然而,软体医疗机器人要实现医疗应用仍需克服若干挑战。
为了软体医疗机器人的本体实现其潜力,必须在软材料中嵌入传感、驱动、计算、能量存储和通信功能,从而推动针对不同应用的新型材料的发展,以及对生物相容性和仿生学(例如,主动状态或活性材料,其机械、电气和化学性质可随施加的刺激而变化,且具备被打印成具有特定功能的形式/形状的能力)的相关要求。智能材料设计的进步在软体医疗机器人的未来发展中发挥着至关重要的作用。
软体医疗机器人的主要柔性执行器包括形状记忆合金、流体驱动人工肌肉和TDAs。流体驱动人工肌肉已被广泛研究,是软体医疗机器人中最常用的驱动方式。然而,此类系统的便携性仍然受限,因为需要压缩空气源。尽管已经提出了一些便携式解决方案,但它们并不代表一种通用的解决方案。具有内置能量或电源的柔性驱动概念至关重要。柔性且可拉伸的电子学与电源对于软致动器和传感器的操作是必需的。在实现理想的执行器之前,仍有许多工作要做。
柔性感知仍处于起步阶段,开发高性能、高精度和高稳定性的柔性传感器是推动软体医疗机器人进步的重要研究方向和关键技术之一。同时,应根据运动特性设计更智能的控制算法,以实现软体医疗机器人的智能柔顺控制。我们需要将可编程柔顺性融入机器人设计中,使软体医疗机器人能够适应各种情况,并尽可能减少接触传感器的数量(理想情况下为零)。
可调刚度和对环境的形态适应性是软体医疗机器人的关键特征。基于阻塞的技术具有快速、高效、低成本、易于管理且非常通用的优点。然而,迄今为止,由此产生的刚度变化数据尚未达到很高的值。我们需要开发具有可调节刚度的软体医疗机器人,以产生所需的力/扭矩。
随着对软体医疗机器人研究的不断深入,将展现出更优异的性能和发展潜力,并提升柔韧性、精确性和安全性。
7. 结论
本文综述了软体与柔性机器人在医疗应用方面的最新进展,包括仿生学、柔性驱动、感知与智能控制算法以及可调刚度。我们讨论了各自的优势和局限性。针对突破现有研究的局限,提出了一些建议,并提出了对软体医疗机器人研究具有重要意义的可能解决方案,包括新型材料、内置能源或动力源的柔性驱动概念、可编程柔顺性和可调节刚度。然而,仍有许多科学问题尚未解决:如何将可编程柔顺性融入机器人设计中?如何在整体结构上最优分布柔性驱动、传感元件和机械结构?如何感知执行的物理参数,并如何控制这些参数以获得期望的输出或行为?如何控制软体医疗机器人以产生所需的力/扭矩?这些问题都值得深入探索,也是亟待解决的重要难题。

















 79
79

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









