







 本文深入探讨了Anderson指针分析的基本原理与实现细节,包括约束生成与求解过程,并通过实例展示了算法的具体应用。
本文深入探讨了Anderson指针分析的基本原理与实现细节,包括约束生成与求解过程,并通过实例展示了算法的具体应用。
本文是垃圾文章,请直接学习其它资料
- 南京大学《软件分析》课程08(Pointer Analysis)
- https://www.cs.cmu.edu/~aldrich/courses/15-819O-13sp/resources/pointer.pdf
指针分析
指针分析是一类特殊的数据流问题,它是其它静态程序分析的基础,但指针使用的灵活性导致了指针分析的复杂性,实际上指针分析是一个不可判定问题,所以实际的指针分析算法都是近似且保守的,须在效率和精度之间进行折衷。
指针分析研究的内容主要集中在分析精度和时空开销之间的取舍,精度方面,主要指流敏感性(flow-sensitivity)和上下文敏感性(context-sensitivity),一般而言,流敏感分析方法的精度明显好于流不敏感的分析方法,在上下文敏感性上也有同样的特点。
流不敏感的指针分析普遍使用在开源或者产品级高级编译器中,其中主要有两类:基于包含(inclusion-based)的指针分析和基于合并(unification-based)的指针分析。
基于包含的指针分析是一种基于约束集(constraint set)求解的流不敏感的指针分析方法,该指针分析又称为基于子集(subset-based)的指针分析或者基于约束的(constraint-based)的指针分析,在指针分析领域后来也被称之为Anderson风格的指针分析。其算法的时间复杂度为O(n3)。
注:上述内容引用自《陈聪明, 霍玮, 于洪涛,等. 基于包含的指针分析优化技术综述[J]. 计算机学报, 2011, 34(7):001224-1238.》
Anderson’s pointer analysis
Anderson的指针分析算法是一种基于约束(constraint-based)或者说基于子集(subset-based)的方法,根据程序中语句建立变量与变量,或者变量与内存之间的约束关系。Anderson的方法分为两步,约束收集(或者说约束生成,constraint generation)和约束求解(constraint resolution)。
约束生成
约束类型分为三种,基本约束,简单约束,复杂约束,并有如下四种具体形式。
| Constraint type | Assignment | Constraint | Meaning |
|---|---|---|---|
| Base | Referencing ( a = &b ) | a ⊇ {b} | loc(b)∈pts(a) |
| Simple | Aliasing ( a = b ) | a ⊇ b | pts(a) ⊇ ptrs(b) |
| Complex | Dereferencing read ( a = *b ) | a ⊇ *b | ∀v∈pts(b). pts(a) ⊇ pts(v) |
| Complex | Dereferencing write ( *a = b ) | *a ⊇ b | ∀v∈pts(a). pts(v) ⊇ pts(b) |
注:上图中的 loc(b) 表示 b 的地址, pts(a) 表示 a 可能指向的内存的集合
该方法按照以上四种约束形式收集程序中的约束,如下代码实例:
// code sample1
p = &a;
// p ⊇ {a}
q = &b;
// p ⊇ {a}, q ⊇ {b}
*p = q;
// p ⊇ {a}, q ⊇ {b}, *p = q
r = &c;
// p ⊇ {a}, q ⊇ {b}, *p = q, r ⊇ {c}
s = p;
// p ⊇ {a}, q ⊇ {b}, *p = q, r ⊇ {c}, s ⊇ p
t = *p;
// p ⊇ {a}, q ⊇ {b}, *p = q, r ⊇ {c}, s ⊇ p, t ⊇ *p
*s = r;
// p ⊇ {a}, q ⊇ {b}, *p = q, r ⊇ {c}, s ⊇ p, t ⊇ *p, *s ⊇ r
约束图(constraint graph)
约束图 G = <Var, E>,图中的节点为变量或者抽象的内存区域,每一个节点都关联一个对应的point-to sets。 a->b ∈ E,当且仅当如下三种情况之一成立:
- pts( a ) ⊆ pts( b ) :{ 基本约束 }
- a ∈ pts( v ) and pts( *v ) ⊆ pts( b ) : {复杂约束}
- pts( a ) ⊆ pts( *v ) and b ∈ pts( v ):{复杂约束}
注:约束图表示的是约束关系,不是指向关系,这一点要搞清楚
约束图边的添加分为两种,
- 一是在生成约束信息的时候,根据 基本约束 直接添加的边
- 一是在约束求解的过程中,根据 复杂约束 进行“推导”添加的边
对于代码示例1,约束信息收集完时的约束图如图-1所示,该图称之为初始约束图,基本约束和简单约束是创建初始约束图的基础。初始约束图的创建分为如下三步:
- 首先为程序中的每个 变量建立一个节点
- 后根据基本约束标注节点的 指向集
- 每一个初始的简单约束建立一条有向边
对于第二种边,我们不能从约束信息中直接获得,需要对complex constraints进行“推导”才能获得。complex constraint会产生新的base constraint。我们的最终目的不是获得约束图,而是在创建约束图的过程中将 point-to information 进行正确的“传递”。这些point-to information 按照下面的原则进行传播。
如果 loc ∈ pts( a ) 并 ( a->b ∈ E),那么我们就可以得到( loc ∈ pts( b ))。
Anderson算法
采用的是一个工作队列算法(workque algorithm),该算法我直接从[2]中摘抄过来,如图-2所示。
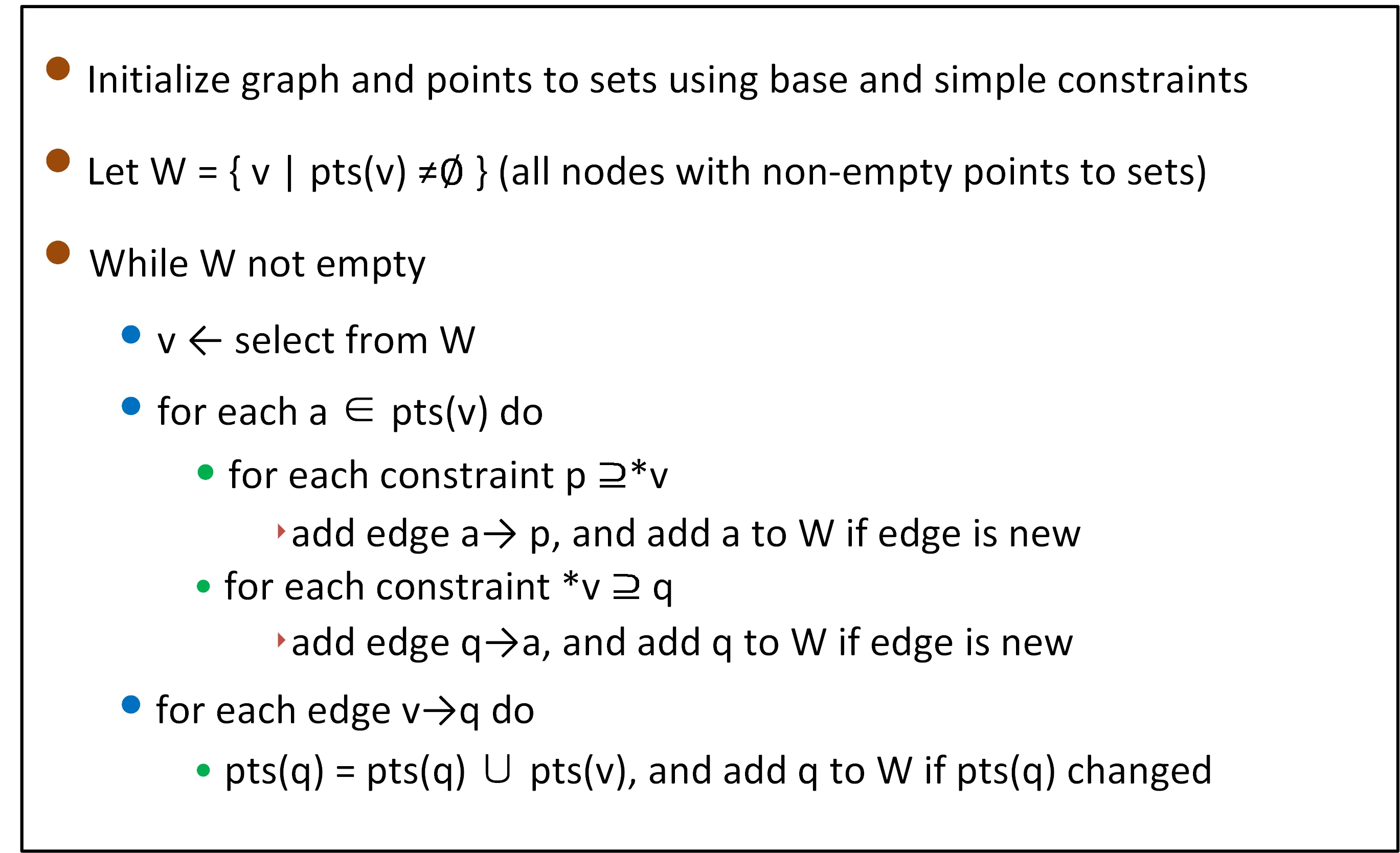
注:更完善的算法见[1]
上述算法中我们有两点需要注意:
- 边的添加。边的添加有两种情况,分别是a ∈ pts( v ) and pts( v ) ⊆ pts( b ) 和 pts( a ) ⊆ pts( v ) and b ∈ pts( v ),这两个都是复杂约束**。
- point-to information的传播。point-to information才是我们最终欲得到的信息。
关于代码实现《指针分析/Point-to Analysis/Reference Analysis》有一个比较初级的实现,这里我就不贴代码了,该博客也有关于算法的示意图。
我这里使用另外一个代码示例[4]来说明整个算法过程,如下所示。
// code sample 2
int i, j, k;
int *a = &i;
// a ⊇ {i}
int *b = &k;
// a ⊇ {i}, b ⊇ {k}
a = &j;
// a ⊇ {i, j}, b ⊇ {k}
int **p = &a;
// a ⊇ {i, j}, b ⊇ {k}, p ⊇ {a}
int **q = &b;
// a ⊇ {i, j}, b ⊇ {k}, p ⊇ {a}, q ⊇ {b}
p = q;
// a ⊇ {i, j}, b ⊇ {k}, p ⊇ {a}, q ⊇ {b}, p ⊇ q
int *c = *q;
// a ⊇ {i, j}, b ⊇ {k}, p ⊇ {a}, q ⊇ {b}, p ⊇ q, c ⊇ *q
将Anderson`s algorithm应用到上述代码的整个过程如图-3所示。最后按照约束图中节点的point-to sets,按照指向关系,构建内存指向图。


当算法迭代终止的时候,我们根据约束图中节点的point-to sets,建立各个节点间的指向关系,如最后一幅图所示。
未来工作
Anderson’s algorithm优化
llvm-2.4 Andersons.cpp源码分析
clang static analyzer中Anderson’s pointer analysis实现
[1]. 陈聪明, 霍玮, 于洪涛,等. 基于包含的指针分析优化技术综述[J]. 计算机学报, 2011, 34(7):001224-1238.
[2]. Pointer Analysis. CS252r Spring 2011
[3]. Andersen L. Program analysis and specialization for the C programming language[J]. Addison-Wesley Series in Computer Science, 1994, 2(1):37 - 77.
[4]. 指针分析/Point-to Analysis/Reference Analysis
[5]. #63 Andersen’s Points to Analysis

















 675
675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









