







在完成项目:用IQ调制实现4FSK 后,虽然我了解了IQ调制的原理,也明白4FSK调制的原理(键控),但是其结合应用的原理一直没搞懂。
今天抽空学习的时候看了两篇文章:
无线通信中的IQ调制,BPSK调制,QPSK调制,16QAM调制的理解
【通信原理 入坑之路】—— 详解IQ调制以及星座图原理
这两篇文章讲的相当好,条理清晰。为便于自己以后回顾,也记录下自己一些不一样的见解,为此留下此博文。
一、IQ调制解调
什么是IQ调制呢?
我们想象,当我们想同时传输两个符号:a和b时,该怎么办呢?
当然我们可以在两个载频不同的信道中同时传输。
或者可以构建一个复信号:a+bj丢进信道
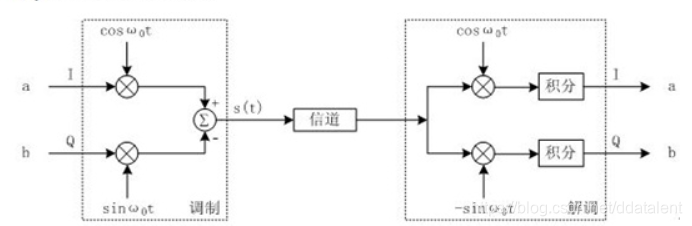
这就是将a,b两个符号划分到同一个信道,利用一对正交载波,同时调制传输,这样就可以节约一倍的频谱资源啦。
这里说的正交载波,指的就是
cos
ω
0
t
\cos{\omega_0}t
cosω0t和
sin
ω
0
t
\sin{\omega_0}t
sinω0t。他们二者频率相同,相位相差
π
2
\frac{\pi }{2}
2π,恰好正交。
我们把符号a,b分别丢进I、Q两路输入,分别可得到
I路:
I
∗
cos
ω
0
t
=
a
cos
ω
0
t
I*\cos{\omega_0}t=a\cos{\omega_0}t
I∗cosω0t=acosω0t
Q路:
−
Q
∗
cos
ω
0
t
=
−
b
sin
ω
0
t
-Q*\cos{\omega_0}t=-b\sin{\omega_0}t
−Q∗cosω0t=−bsinω0t
由此可得输出为:
s
(
t
)
=
a
cos
ω
0
t
−
b
sin
ω
0
t
s(t)=a\cos{\omega_0}t-b\sin{\omega_0}t
s(t)=acosω0t−bsinω0t
把
s
(
t
)
s(t)
s(t)丢进信道,则可以用频率为
ω
0
\omega_0
ω0的载波同时间传输两个符号了,这就是正交调制,也叫IQ调制。
接收方该如何解调信号 s ( t ) s(t) s(t)得到原有信号a,b呢?
利用载波的正交性,我们可以进行如下操作:
先将信号
s
(
t
)
s(t)
s(t)乘以载波
cos
ω
0
t
\cos{\omega_0}t
cosω0t,然后积分,接着做一个尺度变换。
即
2
T
∫
−
T
/
2
T
/
2
s
(
t
)
cos
ω
0
t
d
t
=
2
T
∫
−
T
/
2
T
/
2
(
a
cos
ω
0
t
−
b
s
i
n
ω
0
t
)
cos
ω
0
t
d
t
=
2
T
∫
−
T
/
2
T
/
2
(
a
cos
2
ω
0
t
−
b
s
i
n
ω
0
t
cos
ω
0
t
)
d
t
=
2
T
∫
−
T
/
2
T
/
2
[
a
2
(
1
+
cos
2
ω
0
t
)
−
b
2
s
i
n
2
ω
0
t
]
d
t
=
2
T
.
a
2
.
T
=
a
\begin{array}{l} 即\frac{2}{T}\int_{ - T/2}^{T/2} {s(t)\cos {\omega _0}tdt} \\ \\ = \frac{2}{T}\int_{ - T/2}^{T/2} {(a\cos {\omega _0}t - bsin{\omega _0}t)\cos {\omega _0}tdt} \\ \\ = \frac{2}{T}\int_{ - T/2}^{T/2} {(a{{\cos }^2}{\omega _0}t - bsin{\omega _0}t\cos {\omega _0}t)dt} \\ \\ = \frac{2}{T}\int_{ - T/2}^{T/2} {\left[ {\frac{a}{2}(1 + \cos 2{\omega _0}t) - \frac{b}{2}sin2{\omega _0}t} \right]} dt\\ \\ = \frac{2}{T}.\frac{a}{2}.T = a \end{array}
即T2∫−T/2T/2s(t)cosω0tdt=T2∫−T/2T/2(acosω0t−bsinω0t)cosω0tdt=T2∫−T/2T/2(acos2ω0t−bsinω0tcosω0t)dt=T2∫−T/2T/2[2a(1+cos2ω0t)−2bsin2ω0t]dt=T2.2a.T=a
由此可以得到原信号a,同时把信号
s
(
t
)
s(t)
s(t)乘以载波
sin
ω
0
t
\sin{\omega_0}t
sinω0t,然后积分,接着做一个尺度变换。可以得到原信号b。
推导过程同上,不再赘述。其中
T
T
T是
T
0
=
2
π
ω
T_0=\frac{2\pi }{\omega}
T0=ω2π的整数倍。倒数第二步推导利用了求解定积分时的函数奇偶性
以上就是IQ调制解调的原理了。那么它又如何运用到BPSK的调制中呢?
二、BPSK调制解调
BPSK(Binary Phase Shift Keying) —— 二进制相移键控。
这个调制很简单,就是发0的时候,给它调制成
cos
ω
0
t
\cos{\omega_0}t
cosω0t发出去。就是发1的时候,给它调制成
cos
(
ω
0
t
+
π
)
\cos({\omega_0}t+\pi)
cos(ω0t+π)发出去。
bpsk也叫2psk,就是两个相位的调制。至于为什么选0和 π \pi π两个相位呢,因为这两个相位相隔最远,最不容易误码。信息论的知识哈。
| 基带信号 | 发送信号 | 信号相位 |
|---|---|---|
| 0 | cos ω 0 t \cos{\omega_0}t cosω0t | 0 |
| 1 | cos ( ω 0 t + π ) = − c o s ω 0 t \cos({\omega_0}t+\pi)=-cos{\omega_0t} cos(ω0t+π)=−cosω0t | π \pi π |
解调的时候再根据信号的相位,对应反映射就可以了。
看到这里,看到发送信号
cos
ω
0
t
\cos{\omega_0}t
cosω0t和
−
c
o
s
ω
0
t
-cos{\omega_0t}
−cosω0t,你有没有联想到上面的IQ调制解调呢。
s
(
t
)
=
a
cos
ω
0
t
−
b
sin
ω
0
t
s(t)=a\cos{\omega_0}t-b\sin{\omega_0}t
s(t)=acosω0t−bsinω0t
梦幻联动
让我们把IQ调制嵌入BPSK的调制中去。
| 基带信号 | IQ信号 | 发送信号 | 信号相位 |
|---|---|---|---|
| 0 | a=1,b=0 | cos ω 0 t \cos{\omega_0}t cosω0t | 0 |
| 1 | a=-1,b=0 | cos ( ω 0 t + π ) = − c o s ω 0 t \cos({\omega_0}t+\pi)=-cos{\omega_0t} cos(ω0t+π)=−cosω0t | π \pi π |
因为BPSK只发射 cos ω 0 t \cos{\omega_0}t cosω0t和 − c o s ω 0 t -cos{\omega_0t} −cosω0t信号,所以我们不需要Q路信号,只需要在I路不断发送1和-1即可。这样的话,我们就成功用IQ调制实现了键控法的BPSK调制。(因为键控法在仿真时不怎么常用。)
解调的话,就不多说了,IQ解调。然后再吧IQ输入反映射成基带信号就行。
三、QPSK调制解调
QPSK也叫4psk,就是四个相位的调制。为了误码率最小,此时选的就是 π 4 \frac{\pi }{4} 4π, 3 π 4 \frac{3\pi }{4} 43π, 5 π 4 \frac{5\pi }{4} 45π, 7 π 4 \frac{7\pi }{4} 47π四个相位。
QPSK调制也很不难,见下表吧。
| 基带信号 | 发送信号 | 信号相位 |
|---|---|---|
| 0 0 | cos ( ω 0 t + π 4 ) \cos({\omega_0t+\frac{\pi }{4})} cos(ω0t+4π) | π 4 \frac{\pi }{4} 4π |
| 0 1 | cos ( ω 0 t + 3 π 4 ) \cos({\omega_0t+\frac{3\pi }{4})} cos(ω0t+43π) | 3 π 4 \frac{3\pi }{4} 43π |
| 1 1 | cos ( ω 0 t + 5 π 4 ) \cos({\omega_0t+\frac{5\pi }{4})} cos(ω0t+45π) | 5 π 4 \frac{5\pi }{4} 45π |
| 1 0 | cos ( ω 0 t + 7 π 4 ) \cos({\omega_0t+\frac{7\pi }{4})} cos(ω0t+47π) | 7 π 4 \frac{7\pi }{4} 47π |
和BPSK不同,此时的相位不是单纯的0和
π
\pi
π了,因此需要I、Q两路一起,才能获得所需要的发送信号。
s
(
t
)
=
a
cos
ω
0
t
−
b
sin
ω
0
t
s(t)=a\cos{\omega_0}t-b\sin{\omega_0}t
s(t)=acosω0t−bsinω0t
根据三角函数的知识,我们可以知道,如何拼凑
cos
ω
0
t
\cos{\omega_0}t
cosω0t和
sin
ω
0
t
\sin{\omega_0}t
sinω0t才能得到我们需要的四种发送信号。
| 基带信号 | IQ信号 | 发送信号 | 信号相位 |
|---|---|---|---|
| 0 0 | a= 1 2 \frac{1 }{\sqrt{2}} 21,b= 1 2 \frac{1 }{\sqrt{2}} 21 | cos ( ω 0 t + π 4 ) \cos({\omega_0t+\frac{\pi }{4})} cos(ω0t+4π) | π 4 \frac{\pi }{4} 4π |
| 0 1 | a=- 1 2 \frac{1 }{\sqrt{2}} 21,b= 1 2 \frac{1 }{\sqrt{2}} 21 | cos ( ω 0 t + 3 π 4 ) \cos({\omega_0t+\frac{3\pi }{4})} cos(ω0t+43π) | 3 π 4 \frac{3\pi }{4} 43π |
| 1 1 | a=- 1 2 \frac{1 }{\sqrt{2}} 21,b=- 1 2 \frac{1 }{\sqrt{2}} 21 | cos ( ω 0 t + 5 π 4 ) \cos({\omega_0t+\frac{5\pi }{4})} cos(ω0t+45π) | 5 π 4 \frac{5\pi }{4} 45π |
| 1 0 | a= 1 2 \frac{1 }{\sqrt{2}} 21,b=- 1 2 \frac{1 }{\sqrt{2}} 21 | cos ( ω 0 t + 7 π 4 ) \cos({\omega_0t+\frac{7\pi }{4})} cos(ω0t+47π) | 7 π 4 \frac{7\pi }{4} 47π |
由此,我们将IQ调制和QPSK联合应用了起来。
四、8PSK调制解调
8SPK
| 基带信号 | IQ信号 | 发送信号 | 信号相位 |
|---|---|---|---|
| 0 0 0 | a= cos π 8 \cos\frac{\pi }{8} cos8π,b= sin π 8 \sin\frac{\pi }{8} sin8π | cos ( ω 0 t + π 8 ) \cos({\omega_0t+\frac{\pi }{8})} cos(ω0t+8π) | π 8 \frac{\pi }{8} 8π |
| 0 0 1 | a= sin π 8 \sin\frac{\pi }{8} sin8π,b= cos π 8 \cos\frac{\pi }{8} cos8π | cos ( ω 0 t + 3 π 8 ) \cos({\omega_0t+\frac{3\pi }{8})} cos(ω0t+83π) | 3 π 8 \frac{3\pi }{8} 83π |
| 0 1 1 | a=- sin π 8 \sin\frac{\pi }{8} sin8π,b= cos π 8 \cos\frac{\pi }{8} cos8π | cos ( ω 0 t + 5 π 8 ) \cos({\omega_0t+\frac{5\pi }{8})} cos(ω0t+85π) | 5 π 8 \frac{5\pi }{8} 85π |
| 0 1 0 | a=- cos π 8 \cos\frac{\pi }{8} cos8π,b= sin π 8 \sin\frac{\pi }{8} sin8π | cos ( ω 0 t + 7 π 8 ) \cos({\omega_0t+\frac{7\pi }{8})} cos(ω0t+87π) | 7 π 8 \frac{7\pi }{8} 87π |
| 1 1 0 | a=- cos π 8 \cos\frac{\pi }{8} cos8π,b=- sin π 8 \sin\frac{\pi }{8} sin8π | cos ( ω 0 t + 9 π 8 ) \cos({\omega_0t+\frac{9\pi }{8})} cos(ω0t+89π) | 9 π 8 \frac{9\pi }{8} 89π |
| 1 1 1 | a=- sin π 8 \sin\frac{\pi }{8} sin8π,b=- cos π 8 \cos\frac{\pi }{8} cos8π | cos ( ω 0 t + 11 π 8 ) \cos({\omega_0t+\frac{11\pi }{8})} cos(ω0t+811π) | 11 π 8 \frac{11\pi }{8} 811π |
| 1 0 1 | a= sin π 8 \sin\frac{\pi }{8} sin8π,b=- cos π 8 \cos\frac{\pi }{8} cos8π | cos ( ω 0 t + 13 π 8 ) \cos({\omega_0t+\frac{13\pi }{8})} cos(ω0t+813π) | 13 π 8 \frac{13\pi }{8} 813π |
| 1 0 0 | a= cos π 8 \cos\frac{\pi }{8} cos8π,b=- sin π 8 \sin\frac{\pi }{8} sin8π | cos ( ω 0 t + 15 π 8 ) \cos({\omega_0t+\frac{15\pi }{8})} cos(ω0t+815π) | 15 π 8 \frac{15\pi }{8} 815π |
由此可以延伸到更高维度的相位调制。
五、QAM调制解调
相信聪明的小伙伴们已经发现了。到目前为止,IQ调制中输入的符号幅度都是一致的,只是相位会有所不同罢了。
如果我们引入幅度变化,幅度键控了。
如果同时存在相位、幅度变化,那不就是相位幅度联合键控了吗,可以同时传输更多的比特信息,当然误码率也会增加。
此处不再过多阐述,懂的自然懂,没懂的再看两遍或者底下留言,给我发私信都行。

















 3481
3481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









