







本文来自:http://blog.csdn.net/jianchi88/article/details/7067260
一来到void start_armboot (void)函数,马上出现两个很重要的数据结构gd_t和bd_t
1、gd_t : global data数据结构定义,位于文件 include/asm-arm/global_data.h。其成员主要是一些全局的系统初始化参数。
- typedef struct global_data {
- bd_t *bd; // struct board_info<SPAN style="FONT-FAMILY: 宋体">指针,保存板子信息</SPAN>
- unsigned long flags; // <SPAN style="FONT-FAMILY: 宋体">指示标志,如设备已经初始化标志等</SPAN>
- unsigned long baudrate;
- unsigned long have_console; /* serial_init() was called */
- unsigned long reloc_off; /* Relocation Offset */
- unsigned long env_addr; /* Address of Environment struct 环境参数地址*/
- unsigned long env_valid; /* Checksum of Environment valid? */
- unsigned long fb_base; /* base address of frame buffer */
- #ifdef CONFIG_VFD
- unsigned char vfd_type; /* display type */
- #endif
- #if 0
- unsigned long cpu_clk; /* CPU clock in Hz! */
- unsigned long bus_clk;
- unsigned long ram_size; /* RAM size */
- unsigned long reset_status; /* reset status register at boot */
- #endif
- void **jt; /* jump table */
- } gd_t;
typedef struct global_data {
bd_t *bd; // struct board_info<span style="font-family:宋体;">指针,保存板子信息</span>
unsigned long flags; // <span style="font-family:宋体;">指示标志,如设备已经初始化标志等</span>
unsigned long baudrate;
unsigned long have_console; /* serial_init() was called */
unsigned long reloc_off; /* Relocation Offset */
unsigned long env_addr; /* Address of Environment struct 环境参数地址*/
unsigned long env_valid; /* Checksum of Environment valid? */
unsigned long fb_base; /* base address of frame buffer */
#ifdef CONFIG_VFD
unsigned char vfd_type; /* display type */
#endif
#if 0
unsigned long cpu_clk; /* CPU clock in Hz! */
unsigned long bus_clk;
unsigned long ram_size; /* RAM size */
unsigned long reset_status; /* reset status register at boot */
#endif
void **jt; /* jump table */
} gd_t;2.、bd_t :board info数据结构定义,位于文件 include/asm-arm/u-boot.h。保存板子参数。
- typedef struct bd_info {
- int bi_baudrate; /* serial console baudrate */
- unsigned long bi_ip_addr; /* IP Address */
- unsigned char bi_enetaddr[6]; /* Ethernet adress */
- struct environment_s *bi_env;
- ulong bi_arch_number; /* unique id for this board <SPAN style="FONT-FAMILY: 宋体">板子</SPAN><SPAN style="FONT-FAMILY: Times New Roman">ID</SPAN><SPAN style="FONT-FAMILY: 宋体">号</SPAN>*/
- ulong bi_boot_params; /* where this board expects params */
- struct /* RAM configuration */
- {
- ulong start;
- ulong size;
- } bi_dram[CONFIG_NR_DRAM_BANKS];
- #ifdef CONFIG_HAS_ETH1
- /* second onboard ethernet port */
- unsigned char bi_enet1addr[6];
- #endif
- } bd_t;
typedef struct bd_info {
int bi_baudrate; /* serial console baudrate */
unsigned long bi_ip_addr; /* IP Address */
unsigned char bi_enetaddr[6]; /* Ethernet adress */
struct environment_s *bi_env;
ulong bi_arch_number; /* unique id for this board <span style="font-family:宋体;">板子</span><span style="font-family:Times New Roman;">ID</span><span style="font-family:宋体;">号</span>*/
ulong bi_boot_params; /* where this board expects params */
struct /* RAM configuration */
{
ulong start;
ulong size;
} bi_dram[CONFIG_NR_DRAM_BANKS];
#ifdef CONFIG_HAS_ETH1
/* second onboard ethernet port */
unsigned char bi_enet1addr[6];
#endif
} bd_t;
分配一个存储全局数据的区域,地 址给指针 gd
- gd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t));
gd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t));
清0并分配空间
- memset ((void*)gd, 0, sizeof (gd_t));
memset ((void*)gd, 0, sizeof (gd_t));
在gd前面的位置给 gd->bd赋值地址
- gd->bd = (bd_t*)((char*)gd - sizeof(bd_t));
gd->bd = (bd_t*)((char*)gd - sizeof(bd_t));
清0并分配空间
- memset (gd->bd, 0, sizeof (bd_t));
memset (gd->bd, 0, sizeof (bd_t));
执行一系列初始化函数
- for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
- if ((*init_fnc_ptr)() != 0) {
- hang ();
- }
- }
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
假如函数指针指向的函数返回值不为0,那么在hang()里就会死循环,初始化失败
- void hang (void)
- {
- puts ("### ERROR ### Please RESET the board ###\n");
- for (;;);
- }
void hang (void)
{
puts ("### ERROR ### Please RESET the board ###\n");
for (;;);
}
函数列表如下:
每个初始化函数正常情况下返回值是0
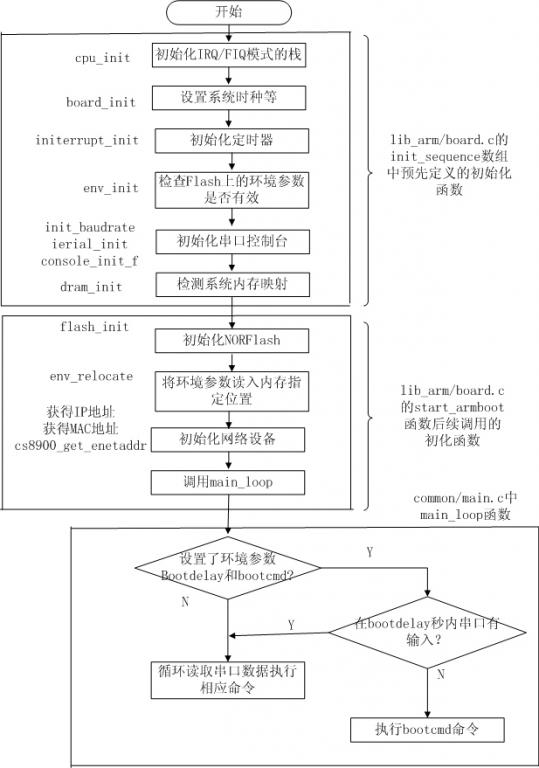
- init_fnc_t *init_sequence[] = {
- cpu_init, /* 初始化irq/fiq模式的栈*/
- board_init, /* 设置系统时钟*/
- interrupt_init, /*初始化定时器*/
- env_init, /* 检查flash上的环境参数是否有效*/
- init_baudrate, /* 初始化波特率*/
- serial_init, /* 初始化串口*/
- console_init_f, /*初始化串口控制台*/
- display_banner, /* say that we are here */
init_fnc_t *init_sequence[] = {
cpu_init, /* 初始化irq/fiq模式的栈*/
board_init, /* 设置系统时钟*/
interrupt_init, /*初始化定时器*/
env_init, /* 检查flash上的环境参数是否有效*/
init_baudrate, /* 初始化波特率*/
serial_init, /* 初始化串口*/
console_init_f, /*初始化串口控制台*/
display_banner, /* say that we are here */
接着进行一些NOR FLASH,LCD,串口,控制台,sd卡,网卡等初始化,不一一列举了。
终于来到重要的时刻了 - -#
进入一个死循环
- for (;;)
- {
- main_loop ();
- }
for (;;)
{
main_loop ();
}
继续跟踪
发现在bootdelay时间内按下键进入命令行,用run_command来解析命令
- #if defined(CONFIG_BOOTDELAY) && (CONFIG_BOOTDELAY >= 0)
- s = getenv ("bootdelay");
- bootdelay = s ? (int)simple_strtol(s, NULL, 10) : CONFIG_BOOTDELAY;
- debug ("### main_loop entered: bootdelay=%d\n\n", bootdelay);
#if defined(CONFIG_BOOTDELAY) && (CONFIG_BOOTDELAY >= 0)
s = getenv ("bootdelay");
bootdelay = s ? (int)simple_strtol(s, NULL, 10) : CONFIG_BOOTDELAY;
debug ("### main_loop entered: bootdelay=%d\n\n", bootdelay);如果CONFIG_BOOTDELAY已经定义,用s得到环境变量bootdelay,然后倒数启动内核
- #ifdef CONFIG_BOOTCOUNT_LIMIT
- if (bootlimit && (bootcount > bootlimit)) {
- printf ("Warning: Bootlimit (%u) exceeded. Using altbootcmd.\n",
- (unsigned)bootlimit);
- s = getenv ("altbootcmd");
- }
- else
- #endif /* CONFIG_BOOTCOUNT_LIMIT */
- s = getenv ("bootcmd");
#ifdef CONFIG_BOOTCOUNT_LIMIT
if (bootlimit && (bootcount > bootlimit)) {
printf ("Warning: Bootlimit (%u) exceeded. Using altbootcmd.\n",
(unsigned)bootlimit);
s = getenv ("altbootcmd");
}
else
#endif /* CONFIG_BOOTCOUNT_LIMIT */
s = getenv ("bootcmd");
CONFIG_BOOTCOUNT_LIMIT是设置u-boot启动次数的限制
最后s = getenv ("bootcmd");获得启动参数
- run_command (s, 0);
run_command (s, 0);启动命令解析
在run_command 函数里最终执行命令
- /* OK - call function to do the command */
- if ((cmdtp->cmd) (cmdtp, flag, argc, argv) != 0) {
- rc = -1;
- }
/* OK - call function to do the command */
if ((cmdtp->cmd) (cmdtp, flag, argc, argv) != 0) {
rc = -1;
}
这是一个命令结构体,原型如下:
- struct cmd_tbl_s {
- char *name; /* Command Name */
- int maxargs; /* 最大的参数个数 */
- int repeatable; /* 命令可否重复 */
- int (*cmd)(struct cmd_tbl_s *, int, int, char *[]);/*对应的函数指针*/
- char *usage; /* Usage message (short) */
struct cmd_tbl_s {
char *name; /* Command Name */
int maxargs; /* 最大的参数个数 */
int repeatable; /* 命令可否重复 */
int (*cmd)(struct cmd_tbl_s *, int, int, char *[]);/*对应的函数指针*/
char *usage; /* Usage message (short) */正常情况下就会执行U_BOOT_CMD命令,U_BOOT_CMD宏定义一个命令,命令宏原型如下:
- /*命令宏U_BOOT_CMD*/
- #define U_BOOT_CMD(name,maxargs,rep,cmd,usage,help) \
- cmd_tbl_t __u_boot_cmd_##name Struct_Section = {#name, maxargs, rep, cmd, usage, help}
/*命令宏U_BOOT_CMD*/
#define U_BOOT_CMD(name,maxargs,rep,cmd,usage,help) \
cmd_tbl_t __u_boot_cmd_##name Struct_Section = {#name, maxargs, rep, cmd, usage, help}假若上面是传入的是一个bootm命令启动内核,将会调用相应的
- U_BOOT_CMD(
- bootm, CFG_MAXARGS, 1, do_bootm,
- "bootm - boot application image from memory\n",
- "[addr [arg ...]]\n - boot application image stored in memory\n"
- "\tpassing arguments 'arg ...'; when booting a Linux kernel,\n"
- "\t'arg' can be the address of an initrd image\n"
U_BOOT_CMD(
bootm, CFG_MAXARGS, 1, do_bootm,
"bootm - boot application image from memory\n",
"[addr [arg ...]]\n - boot application image stored in memory\n"
"\tpassing arguments 'arg ...'; when booting a Linux kernel,\n"
"\t'arg' can be the address of an initrd image\n"在do_bootm函数里,将用switch case检查内核zImage类型,解压方式,操作系统等,因为zImage是自解压的,不用解压
- switch (hdr->ih_os) {
- default: /* handled by (original) Linux case */
- case IH_OS_LINUX:
- do_bootm_linux (cmdtp, flag, argc, argv,
- addr, len_ptr, verify);
- break;
switch (hdr->ih_os) {
default: /* handled by (original) Linux case */
case IH_OS_LINUX:
do_bootm_linux (cmdtp, flag, argc, argv,
addr, len_ptr, verify);
break; 最后,将进入Armlinux.c的do_bootm_linux函数启动Linux内核
U_Boot也是通过标记列表向内核传递参数的
- #ifdef CONFIG_CMDLINE_TAG
- char *commandline = getenv ("bootargs");
- #endif
#ifdef CONFIG_CMDLINE_TAG
char *commandline = getenv ("bootargs");
#endifCONFIG_CMDLINE_TAG在smdk2410.h里已经定义了
theKernel指向内核 存放的地址,(对于ARM架构的CPU,通常是0x30008000),
/*声明内核的入口函数指针*/
- void (*theKernel)(int zero, int arch, uint params);
void (*theKernel)(int zero, int arch, uint params);
/*把内核入口地址赋值给theKernel,hdr是image_header_t结构体,指向uImage头部 ,ih_ep是内核的入口点(Entry Point)*/
- theKernel = (void (*)(int, int, uint))ntohl(hdr->ih_ep);
theKernel = (void (*)(int, int, uint))ntohl(hdr->ih_ep);
/*最后是对内核入口函数的调用,bd->bi_arch_number是这个板子机器类型ID, bd->bi_boot_params是传给内核的参数,从标记列表地址开始*/
- theKernel (0, bd->bi_arch_number, bd->bi_boot_params);
theKernel (0, bd->bi_arch_number, bd->bi_boot_params);
- 引导Linux内核启动的必须要满足的几个条件:
引导Linux内核启动的必须要满足的几个条件:
- * CPU register settings //这里也就是我们的theKernel中的作用
- o r0 = 0.
- o r1 = machine type number.
- o r2 = physical address of tagged list in system RAM.
- * CPU mode
- o All forms of interrupts must be disabled (IRQs and FIQs.)
- o The CPU must be in SVC mode. (A special exception exists for Angel.)
- * Caches, MMUs
- o The MMU must be off.
- o Instruction cache may be on or off.
- o Data cache must be off and must not contain any stale data.
- * Devices
- o DMA to/from devices should be quiesced.
- * The boot loader is expected to call the kernel image by jumping directly to the first instruction of the ker















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









