







石英加速度计采集
石英对外输出的为电流信号,需要串联一个高精度低温漂电阻变为电压信号,再通过Σ-Δ型ADC 进行采样,其中ADC对外通信接口包括SPI和同步如下表
| 名字 | 类型 |
|---|---|
| adc_state[4:0] | adc采样状态机 |
| sync_acc | ADC采样同步(1KHz) |
| ad_start | ADC单次采样开始 |
| ad_drdy | ADC单次采样结束(拉低)和SPI_MISO |
| dat_o | SPI_MOSI |
通过FPGA的逻辑分析仪抓取到如下时序图(条件为sync_acc上升沿):

可以看到两个sync_acc上升沿间隔为25999时钟周期,也就是1ms时间(逻辑分期仪时钟为26M)。
从ad_start上升沿开始,到ad_drdy拉低使用了5286时钟周期((5286+1)/26000≈0.2033ms),即采样单个通道花费的时间约为0.2ms。
从sync_acc上升,到SPI读取完数据使用了16752时钟周期((16752+1)/26000≈0.64435ms),即采集三个通道AD数据花费时间约为0.64ms。
由上述分析可得下表
| 采样 | 所需时间 |
|---|---|
| 采集第一通道开始时刻 | 1个时钟周期(1+1)/26000≈0ms |
| 采集第二通道开始时刻 | 5483个时钟周期(5483+1)/26000≈0.210923ms |
| 采集第二通道开始时刻 | 10964个时钟周期(10964+1)/26000≈0.42173ms |
| 采样三个通道数据+读取完数据 | 约为0.64ms |
需要注意的是这里ADC采集三个加速度计数据大概花了0.64ms,所以《从卫星接收机到组合导航【三】(采样时钟同步)》中的ARM中断需要改成700ms后产生。
光纤陀螺采集
光纤陀螺采集相对简单,只要1KHz的同步和串口,这里不过多说。
零偏稳定性分析
采集了一组温度趋于稳定的陀螺和加速度计数据,链接:https://pan.baidu.com/s/1qBYQ0vZyd3nwdAe11QW8TA
提取码:6rk4
陀螺
首先将3轴陀螺乘以5.0975(标度大致估算的),从而将单位转换成度/小时,也可以通过地球自转角速度进行估算(三轴陀螺用的同一型号,标度不会相差太大),降数据进行10S相邻平均得到下图:
对数据求标准差,可得陀螺零偏稳定性,如下表:
| 陀螺 | 零偏稳定性 |
|---|---|
| X轴 | 0.0461(度/小时) |
| Y轴 | 0.0518(度/小时) |
| Z轴 | 0.0493(度/小时) |
可以看到三轴陀螺零偏稳定性都在0.05(度/小时)附近,基本符合要求,我放在窗台测试的可能会有误差。
加速度
加速计和陀螺差不多,对数据除以1.97099E8,乘以1000000转换成ug,再10s平均得到如下图:
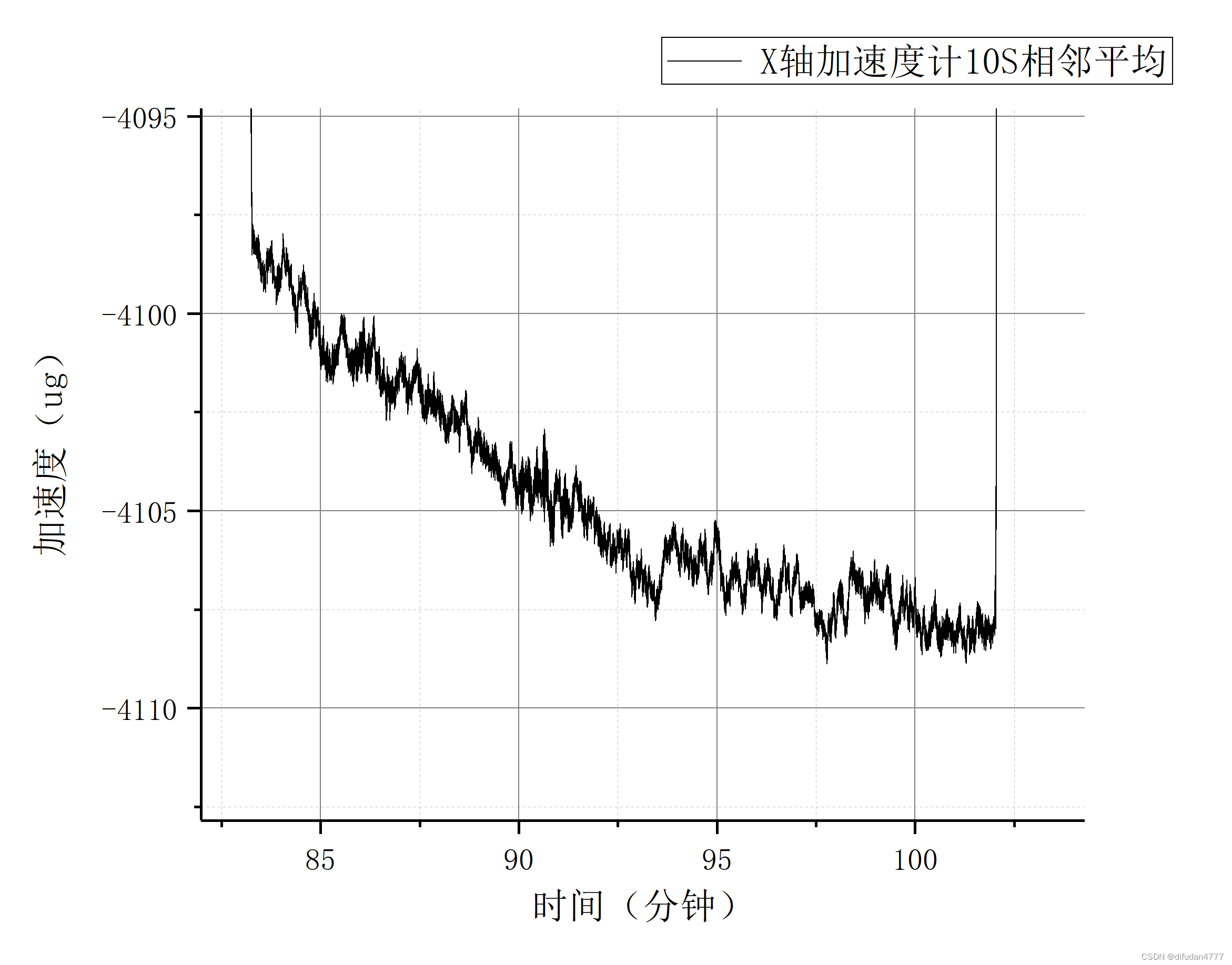
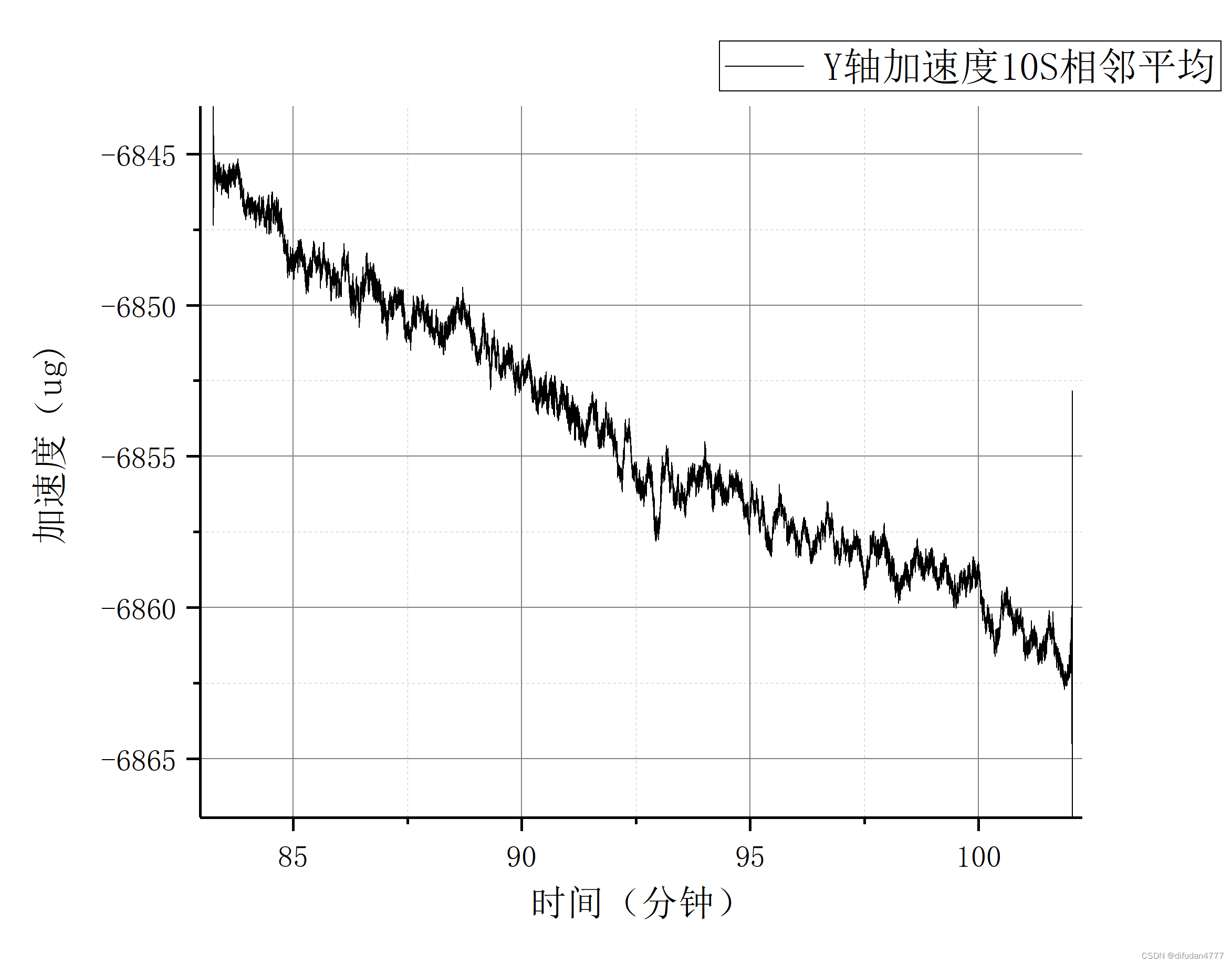
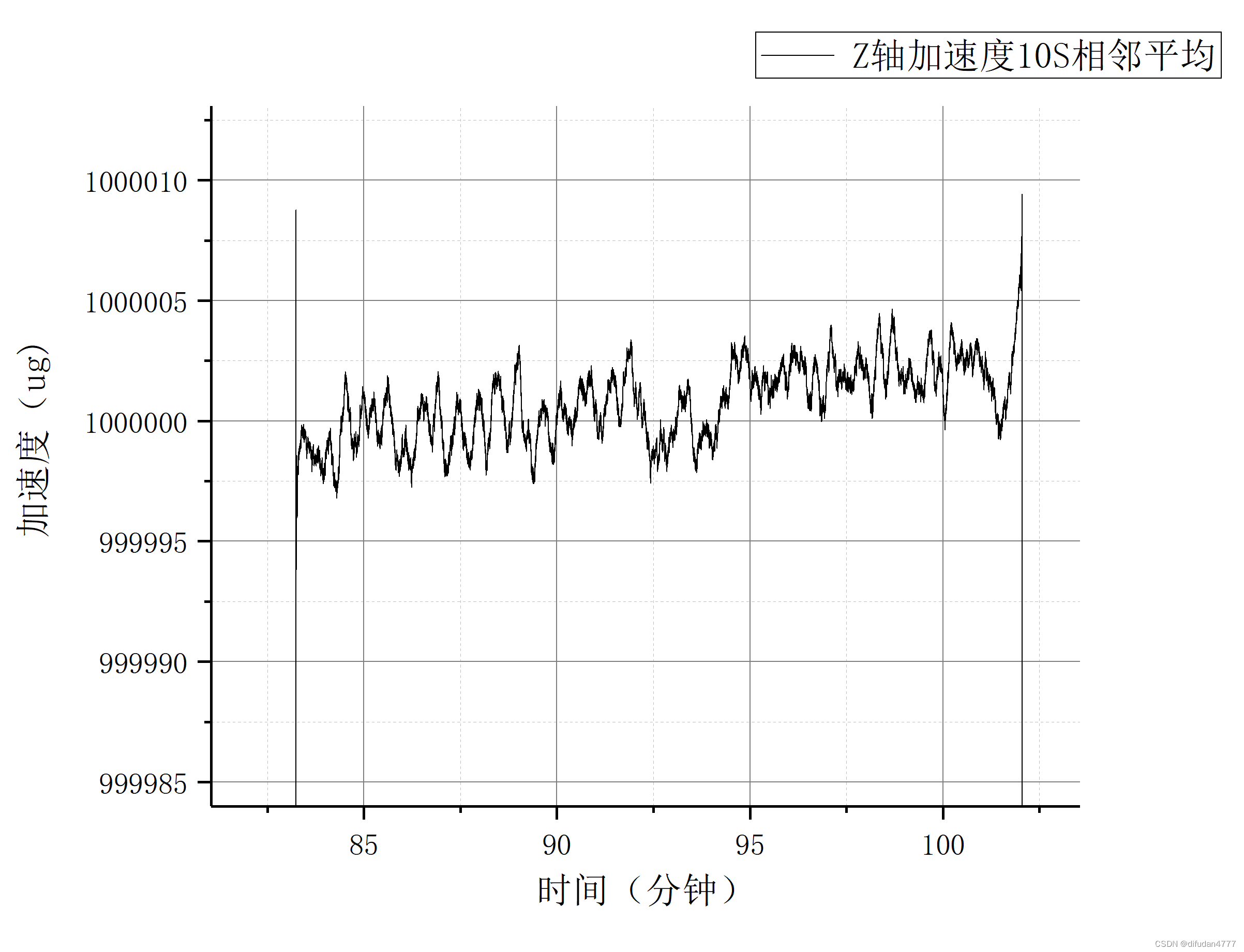
对数据求标准差,可得加速度计的零偏稳定性,如下表:
| 加速度 | 零偏稳定性 |
|---|---|
| X轴 | 2.65852(ug) |
| Y轴 | 4.26612(ug) |
| Z轴 | 1.48472(ug) |
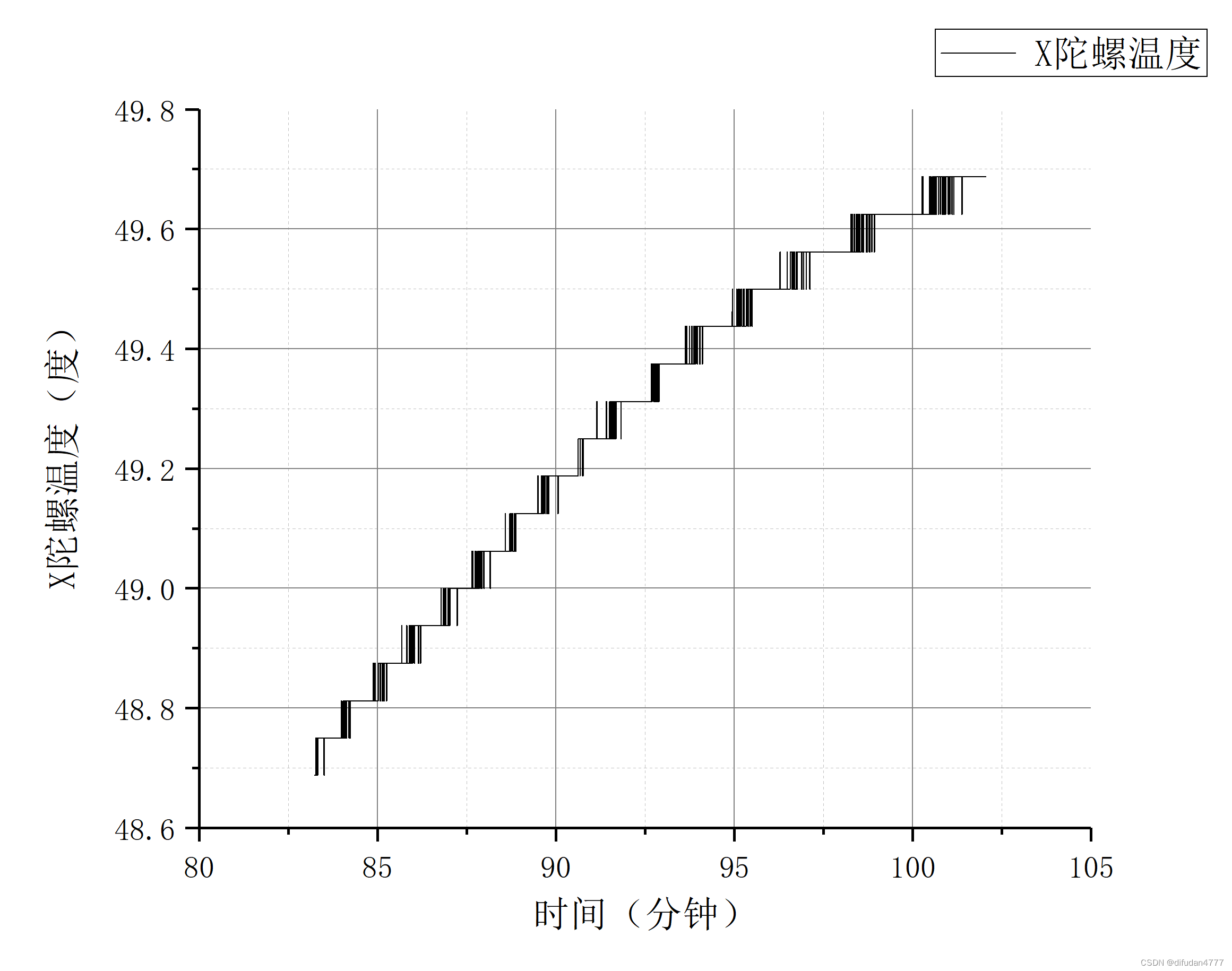
可以得到稳定性小于5ug,这里温度是趋于稳定,且计算时间短才有可能达到这个值,温度曲线如下图:















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









