







为了使机器人真正被视为机器人,它必须能够感知并影响其环境。这就是为什么传感器对于机器人技术如此重要,而了解如何使用传感器使机器人变得智能对于任何新兴的机器人专家而言都是至关重要的。我最近启动了Kickstarter,实际上我们出售的每个套件都免费提供传感器,因此请在结束之前在此处查看!
在此Skill Builder中,我将带您进行名为“感觉>思考>行动”的机器人操作。这是机器人技术中广泛使用的一种操作,是开始了解如何对机器人编程的绝佳场所。让我们潜入……
选择传感器
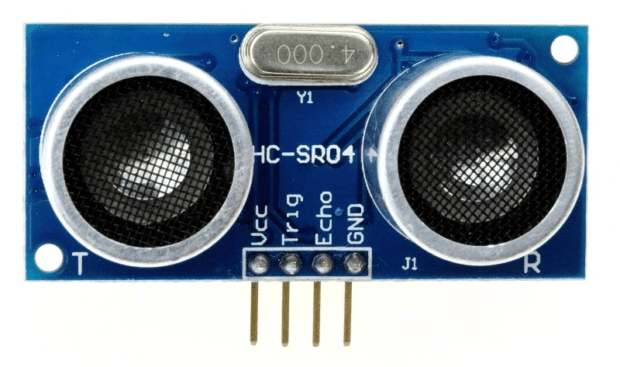
可用的传感器和要感测的物理事物一样多,但是让我们使用HC-SR04超声波距离传感器,因为它便宜,简单并且广泛用于机器人技术(它也有一个非常方便的Arduino库)。
定义机器人模型
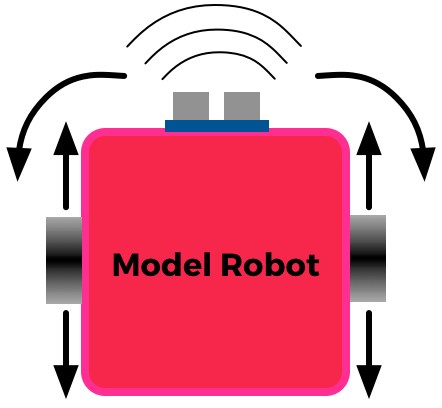
该传感器可以检测距离,因此让我们从一个避免碰撞的简单机器人开始。该机器人可以向前和向后移动,并可以在任一方向上打开该点。机器人的前面是距离传感器。现在,我们已经定义了机器人,让我们开始研究如何使其表现出来。
什么是理性,思考,行动?
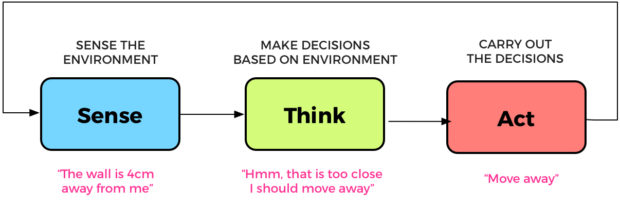
Sense,Think,Act是一个决策循环,可用于解决许多机器人问题,并且非常简单。在这种情况下,机器人必须感应前方是否有障碍物。然后,它必须考虑它是否可以前进,或者应该转向还是后退,然后它将根据该决定采取行动。相同的逻辑可以应用于任何具有几乎任何行为的传感器的机器人。
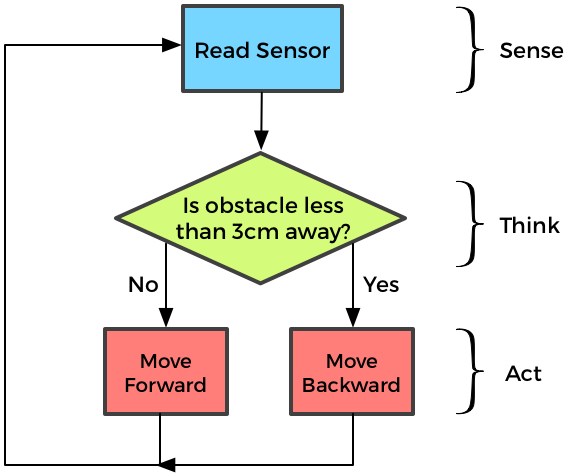
 要将其实际转化为可编写以控制机器人的代码,我们需要更加具体。让我们为机器人创建一个简单的行为,如下所示……
要将其实际转化为可编写以控制机器人的代码,我们需要更加具体。让我们为机器人创建一个简单的行为,如下所示……
- 机器人会感应到前方是否有小于3厘米的障碍物。
- 如果没有障碍物,它将向前移动。
- 如果有障碍物,它将向后移动。
这将很容易转换为代码,但是您可能会意识到,这将导致机器人到达墙时“卡住”振动。它会向前移动直到检测到墙壁,然后向后移动直到没有检测到,然后再次向前移动,依此类推。让我们以以下方式修改行为。
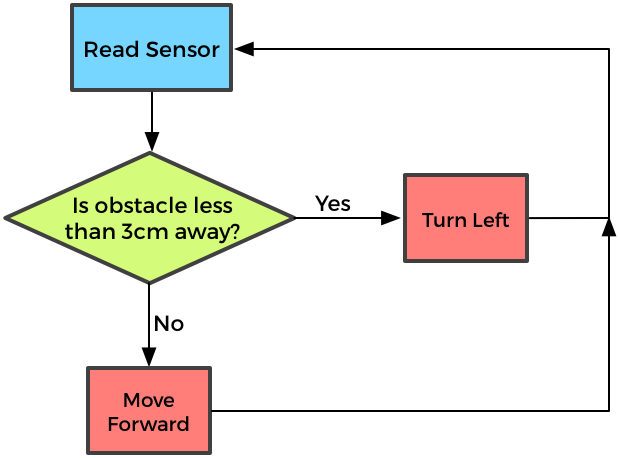
- 机器人会感应到前方是否有小于3厘米的障碍物。
- 如果没有障碍物,它将向前移动。
- 如果有障碍物,它将向左转,然后返回到步骤1。
这将一直持续到最终机器人找到3厘米内无墙的方向为止。
现在,我们有了一种感觉,思考,行动模型,该模型实际上可以帮助我们的机器人避免障碍。这不是一个特别复杂的模型,我们可以增加很多复杂性以提高避障能力。
即使使用简单的机器人,具有非常复杂的感觉,思考行为模型也可以设计为创建非常聪明的行为。这是机器人技术的精髓-软件中的智能!
我们当前的行为有点效率低下,因为机器人必须向左转3次,仅需向右转。让我们以以下方式修改我们的行为,作为遵循上述三个步骤的第四步:
4.如果有障碍物,它将向左转,然后返回到步骤1。
- 机器人会感应到前方是否有小于3厘米的障碍物。
- 如果没有障碍物,它将向前移动。
- 如果有障碍物,它会左转并重新感知。
- 如果没有障碍物,它将向前移动并重置循环。
- 如果有障碍物,它会向右转到并重新感知。
- 如果没有障碍物,它将向前移动并重置循环。
- 如果有障碍物,则机器人会一直向右转,直到没有障碍物为止。

现在,我们的机器人将检查两个方向以查看是否有墙,这意味着机器人将更有效地移动。注意,即使简单的行为也变得越来越复杂,但是如果我们将这种行为视为一系列的Sense,Think,Act循环,那么它将变得更加容易理解!
在那里,您拥有了它。我们已经采用了一个非常简单的“感觉,思考,行为”行为案例,并将其充实到一个有效的避障程序中。将这种行为转换为代码并开始使用机器人技术,这将是一个非常简单的任务!当然,您可以添加更多的距离传感器,甚至不同类型的传感器,以使行为更加复杂。只要记住将其分解为“理性”,“思考”,“行动”,您就可以处理它。当然,如果您要寻找包含大量免费传感器的机器人套件,请访问我们的Kickstarter!















 4776
4776











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









