







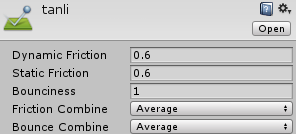
创建一个物体,加上刚体,在Project里面Crea添加一个物理材质physic metrial,第一个是动态摩擦力,第二个是静态摩擦力,第三个是弹力(如果弹力为0不产生反弹,弹力为1产生反弹)

void OnColliderEnter(Collision col)//静态碰撞
{
Debug.Log("Hit something");
}
void OnColliderEnter(Collision col)//静态碰撞
{
if(col.gameObject.name == "Plane")//和Plane碰撞的次数
{
Debug.Log("Hit Plane");
}
if(col.gameObject.name == "Cube")//和Cube碰撞的次数
{
Debug.Log("Hit Cube");
}
}

















 1320
1320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









