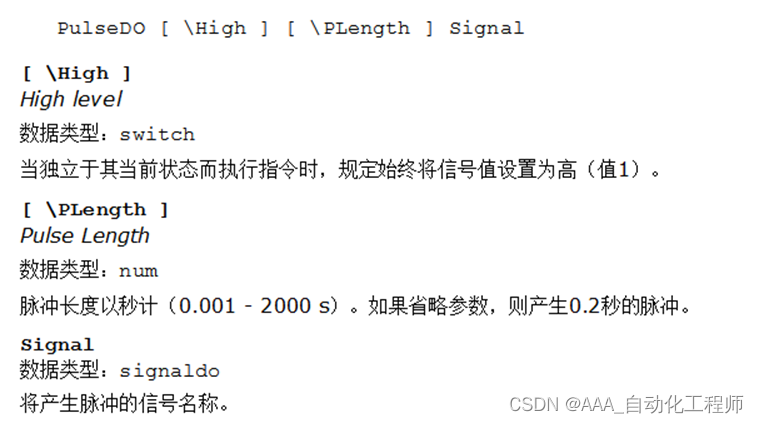
ABB机器人脉冲输出指令Pulse Do的具体使用方法示例 脉冲输出指令Pulse Do 通过脉冲输出指令可让指定的DO点输出脉冲信号,其脉冲宽度、输出形式通过指令的添加项进行定义,其编程格式如下: 未使用High添加项时,如下图所示,脉冲输出的形式与执行指令前的DO信号状态有关,若执行前DO信号为0,则该指令会令该DO信号输出一个指定宽度的正脉冲;若执行前DO信号为1,则该指令会令该DO信号输出一个指定宽度的负脉冲;脉冲的宽度通过添加项Plength进行设置,单位为:秒,未使用Plength添加项时,脉冲宽度为系统默认的0.2秒。


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文详细介绍了ABB机器人如何使用脉冲输出指令Pulse Do来产生脉冲信号,包括脉冲的宽度设置、输出形式以及不同情况下的执行效果。脉冲宽度可通过Plength参数设定,默认为0.2秒。当使用High添加项时,确保输出为正脉冲,且在脉冲结束时,DO信号将恢复到执行前的状态。
本文详细介绍了ABB机器人如何使用脉冲输出指令Pulse Do来产生脉冲信号,包括脉冲的宽度设置、输出形式以及不同情况下的执行效果。脉冲宽度可通过Plength参数设定,默认为0.2秒。当使用High添加项时,确保输出为正脉冲,且在脉冲结束时,DO信号将恢复到执行前的状态。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2144
2144







