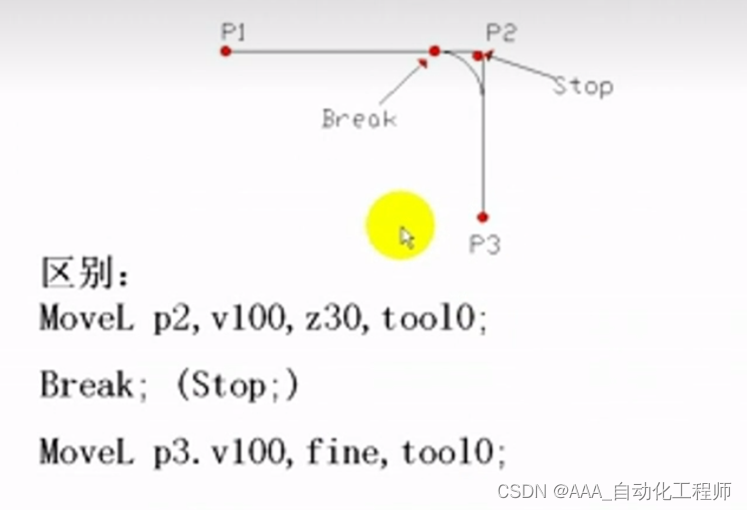
ABB机器人RAPID编程常用指令介绍2 1. 程序运行停止指令 Break 应用:机器人在当前指令行立刻停止运行,程序运行指针指向下一行指令,可以用start键继续运行机器人 举例: … Break; … 与stop指令的区别可以参考下面的示意图: 2. 程序运行停止指令 Exit 应用:机器人在当前指令行停止运行,并且程序重置,程序运行指针指向主程序的第一行。 举例: … Exit; … 3. 程序运行停止指


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文详细介绍了ABB机器人RAPID编程中的多个关键指令,包括Break、Exit、Stop、Procedure、CallByVar、ClkReset、ClkStart、CONNECT、IsignalDI、IsignalDO、Idisable、Ienable、Itimer、TPWrite等,涵盖了中断处理、程序调用、时间控制及示教器屏幕交互等多个方面。
本文详细介绍了ABB机器人RAPID编程中的多个关键指令,包括Break、Exit、Stop、Procedure、CallByVar、ClkReset、ClkStart、CONNECT、IsignalDI、IsignalDO、Idisable、Ienable、Itimer、TPWrite等,涵盖了中断处理、程序调用、时间控制及示教器屏幕交互等多个方面。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2042
2042







