







文章目录
进程地址空间的设计使进程拥有一块独立的空间, 为进程增添了独立性 和 安全性.
但是, 各种进程在操作系统中运行时, 总逃不了可能某些进程之间需要进行交流. 而此时, 进程地址空间的存在又好像成为了进程之间通信的一层阻隔.
进程通信
关于什么是进程通信的问题, 在操作系统中, 进程通信实际上就是 不同进程之间传输、交换数据
那么为什么进程之间要通信呢?为了进程之间不互相干扰, 不是已经用进程地址空间将进程独立了吗?
为什么要有进程通信
虽然进程拥有自己的虚拟地址空间, 但是也并不能阻止进程之间可能存在通信的需求
比如:
-
进程之间数据传输:
一个进程需要将自身的数据 发送到 另一个进程; 或者 一个进程 需要 另一个进程的数据
-
进程需要共享资源:
就像可能多个进程可以同时使用加载到内存中的动态库代码一样
-
通知事件
就比如, 在Linux中, 子进程运行终止 需要告诉父进程运行结果
-
进程控制另一个进程:
比如, 我们在使用程序调试代码的时候, 其实就是一个进程完全控制了另一个进程的执行, 让我们可以在进程运行时打上断点、执行下一个语句等
-
……
这些都是进程通信的需求, 有需求那么就要提供方法.
Linux进程通信方法
Linux为我们提供了三种进程间通信的方法:
-
pipe 管道通信管道通信相信许多人已经用过了, 在命令行中的标志就是:
|:
管道通信一般用于
本地进程之间传输数据.比如在上面的例子中, 我们将ps 进程执行的数据通过管道传输给了 grep, 才能筛选出指定的内容
管道通信又分为:
匿名管道和命名管道管道通信是本片文章的主要内容
-
System V 进程通信
System V 是一套进程通信的标准, 可以为操作系统提供进程通信的接口, 非本篇文章的主要内容
-
POSIX 进程通信
POSIX 也是一套进程通信的标准, 这套标准可以为操作系统提供达成进程通信的接口, 也非本篇文章的主要内容
本篇文章的主要内容, 是 pipe管道通信, 不会涉及到 System V 和 POSIX 进程通信
管道
在正式介绍管道之前, 先来简单分析一下, 进程怎么样通信的?
进程是拥有自己的进程地址空间的, 也就是说进程之间, 不能像我们人与人之间直接面对面说话.
但进程终究是在操作系统中运行着, 并且使用着操作系统的各种资源. 那么, 进程之间是否可以通过操作系统中的资源进行通信呢?
就像 一个进程向文件中写入内容, 另一个进程从同一个文件中读取内容:

这个过程中, 我们通过访问同一个文件资源, 达成了一个进程向另一个进程传递数据的目的, 那这其实就是一种广义上的进程通信.
那么也就是说, 进程通信的前提其实是 不同进程需要先能够看到、能够获取同一份资源(文件、内存等)
这个资源 的种类, 其实就决定了进程通信的方式
管道, 就是提供资源的一种手段, 管道其实是一种文件资源
什么是管道?
管道, 是Unix中最古老的进程间通信的方式
管道, 其实就是 一个进程连接到另一个进程的数据流. 就像我们生活中, 管道是输送资源的:石油、天然气等
而系统中的管道, 则是输送数据的.
就像这样我们之前在命令行中使用的命令:ps -ajx |grep
我们使用管道, 将ps的数据传输到了grep中, 供grep筛选. 这之中, 管道就起到了传输数据的作用.
那么管道究竟是什么?
管道, 其实是 一个打开的文件. 但是这个文件很特殊, 向这个文件中写入数据实际上并不会真正写入磁盘中.
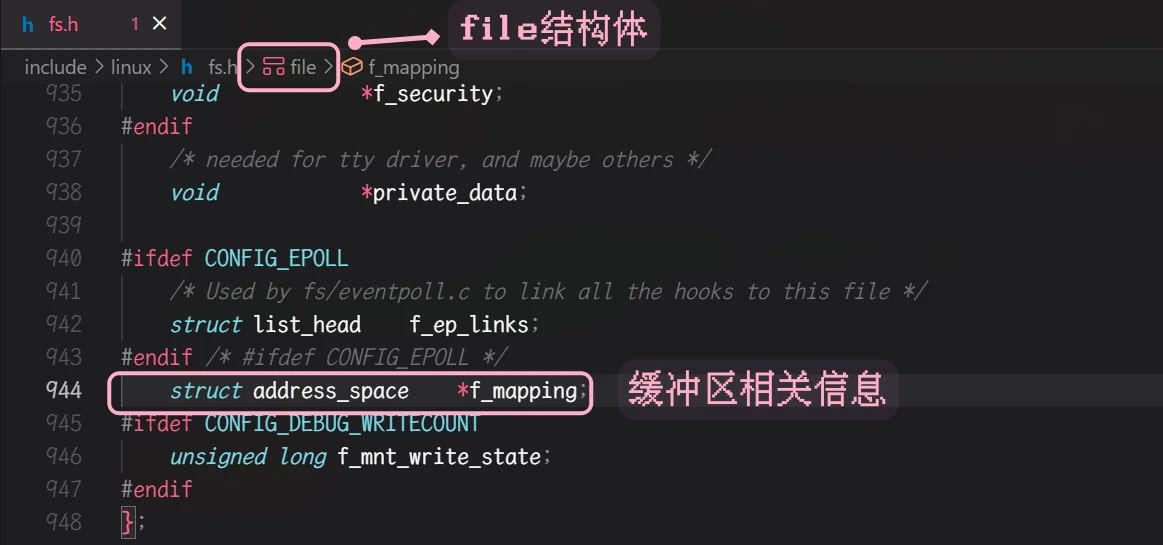
在介绍Linux系统的文件描述符时, 简单介绍了Linux系统中 描述已打开文件的结构体files_struct, 其中存储着 指向打开文件的数组fd_array, 此数组的类型是 struct files*.
而这个 files结构体中, 直接或间接描述了文件的所有属性, 以及 此文件的缓冲区相关信息:
缓冲区信息中, 包含着描述文件的inode结构体, 而inode结构体中其实描述着一个联合体:
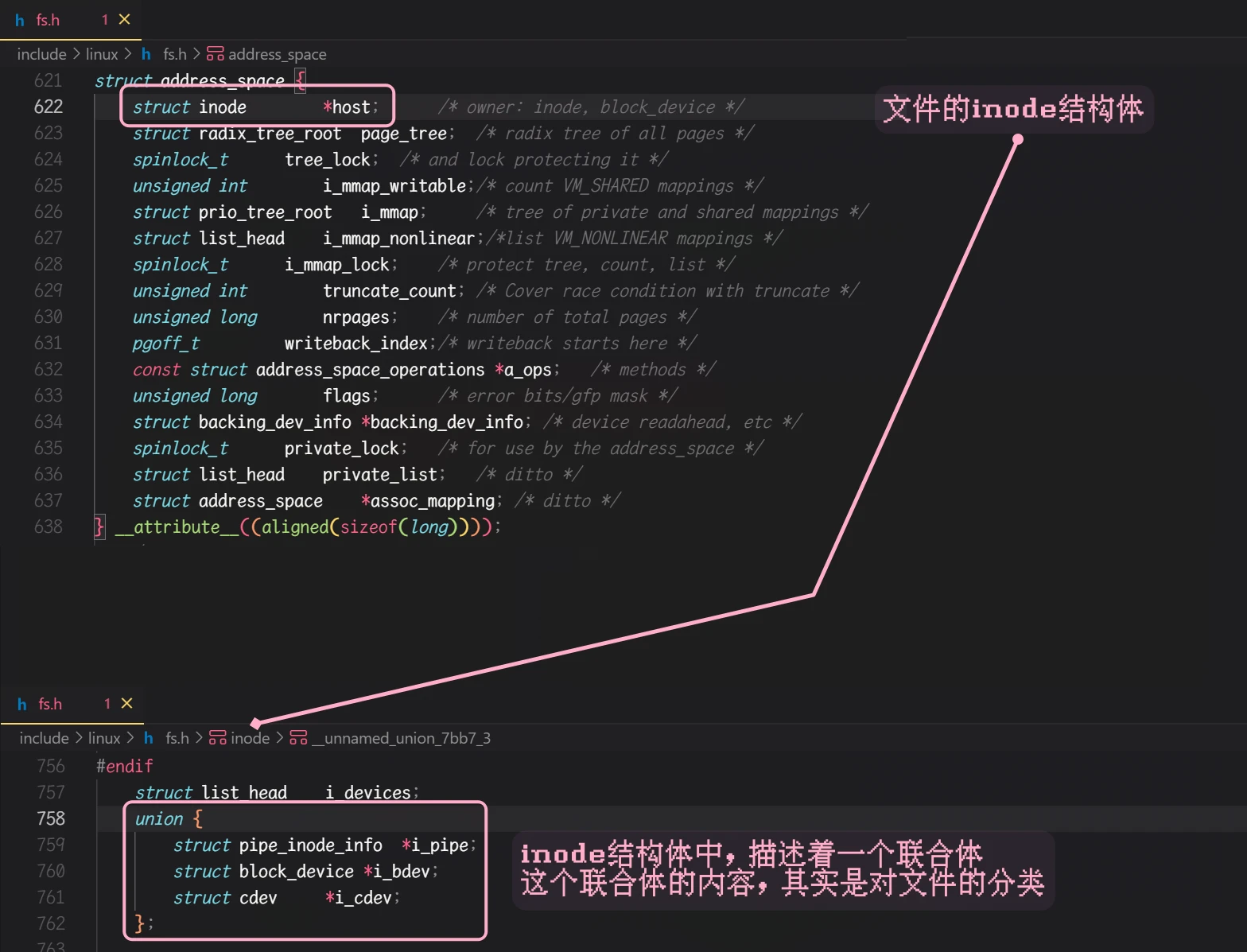
这个处于inode结构体中的联合体, 其实就是为了标识这个文件的类型, 其中pipe 就表示此文件的类型是管道文件.
inode的此联合体, 可以表示三种文件:
- i_pipe, 管道文件
- i_dbev, 块设备(磁盘)文件
- i_cdev, 字符设备文件: 键盘等
通过文件的inode, 系统可以辨别出打开的文件是管道文件.
而 向管道文件中写入数据实际上并不会写入到磁盘上, 而是只写入到文件的缓冲区中, 因为管道文件主要是用来进程间通信的, 如果先写入磁盘另一个进程再读取, 整个过程就太慢了
这种不实际存储数据的行为特点, 其实也符合生活中管道的特点, 管道不能用来存储资源, 只能用来传输资源
并且, 除了管道不实际存储资源以外, 管道还有一个特点:管道是单向传输的
这是管道的特点, Linux的管道也是遵循这个特点的, 也就是说, 两个进程间使用管道通信时, 其中一个进程若以只写方式打开管道, 那么另一个进程就只能以只读方式打开文件.

或者也可以反过来, 不过管道的两端只能是不同的打开方式
管道的种类有两种:
- 匿名管道
- 命名管道
从管道种类的名字上其实就能判断出来两种管道文件的打开的方式
匿名管道
匿名管道的创建, 不会指定打开文件的文件名、文件路径等, 即不会有目标的打开文件
只是在内存中打开一个文件, 用于进程间的通信
而由于匿名管道是非明确目标的文件, 也就意味着两个完全不相关的进程是无法一起访问这个管道的, 因为完全不相关的进程无法找到这个管道文件.
这也就意味着, 匿名管道其实只能用于具有血缘关系的进程间通信.
匿名管道可以用于父子进程之间的通信, 那么管道的创建流程大概就是:
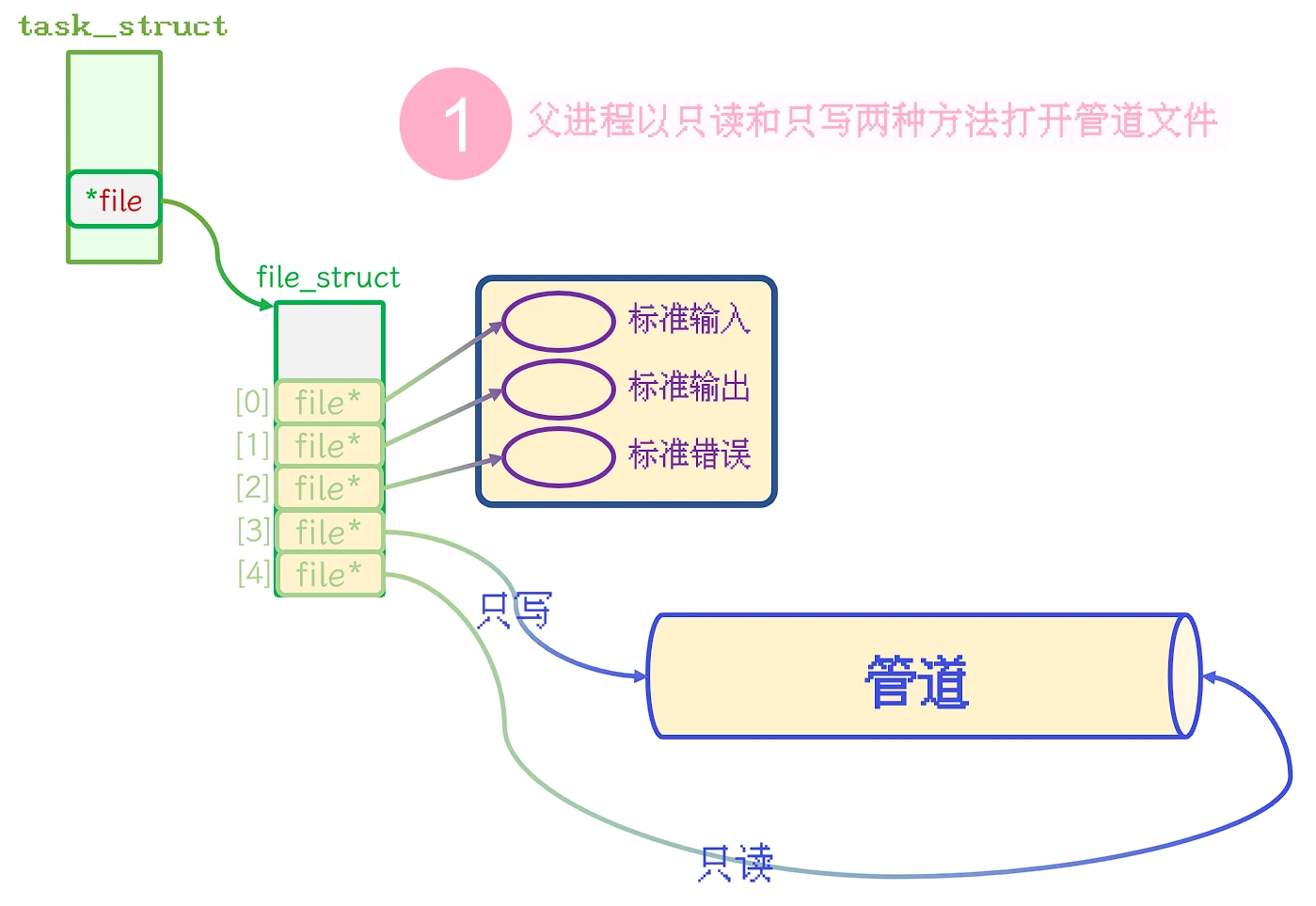
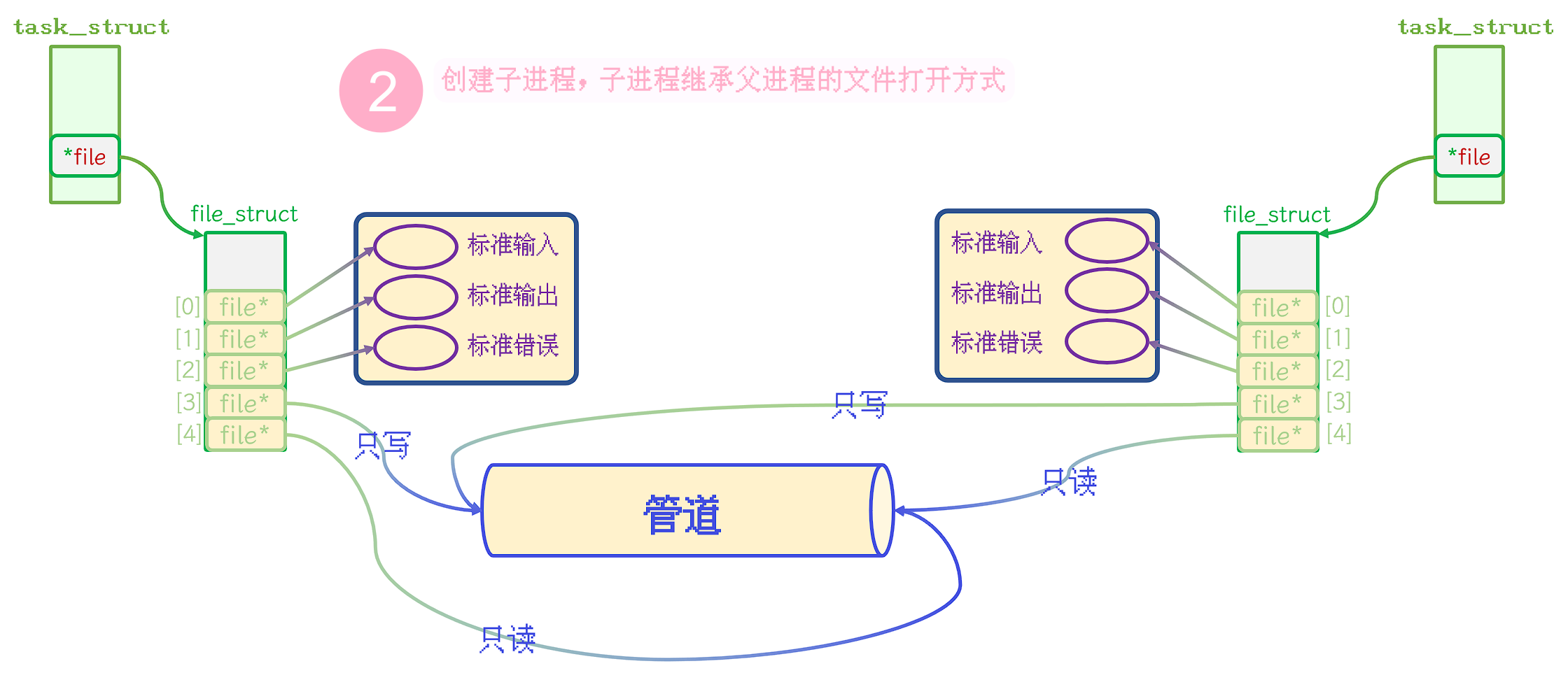
也就是说, 匿名管道的创建应该是 由父进程创建, 然后创建子进程继承父进程的管道, 然后再关闭管道的写入端或读取端
这样就创建了一个管道通信
然而, 相信许多人对于这个过程都会有许多的问题:
- 为什么父子进程要分别以只读和只写方式打开两次文件, 然后再创建子进程呢?
为什么不是父进程以一个方式打开, 子进程再以另一个方式打开呢?
因为子进程会以继承父进程的方式打开同一个文件, 即子进程打开文件的方式与父进程是相同的
那这样的话, 父子进程通过想要通过管道实现进程通信, 子进程就需要先关闭已打开的文件, 再以某种方式打开同一个文件
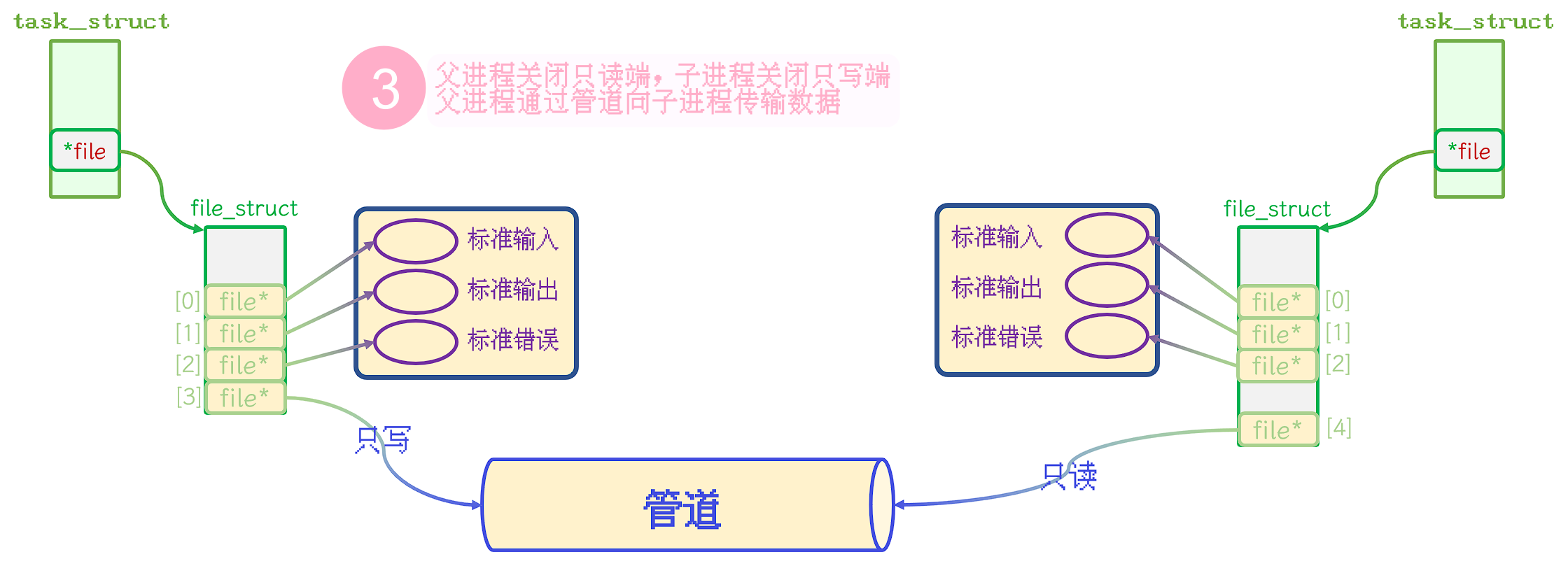
这样比较麻烦, 如果在创建子进程之前, 父进程就已经以两种方式打开同一个文件, 那么再子进程创建之后, 只需要父进程关闭一个端口, 子进程关闭另一个端口就可以了
- 必须父进程关闭读取端, 子进程关闭写入端吗?
并不是的, 父子进程关闭哪个端口, 其实是 根据需求 关闭的.
如果子进程要向父进程传输数据, 那么关闭读取端的就应该是子进程
- 进程是如何知道管道被打开了什么端口的?或者说
进程是如何知道管道被打开了几次的?
其实在file结构体中, 存在一个计数变量 f_count:
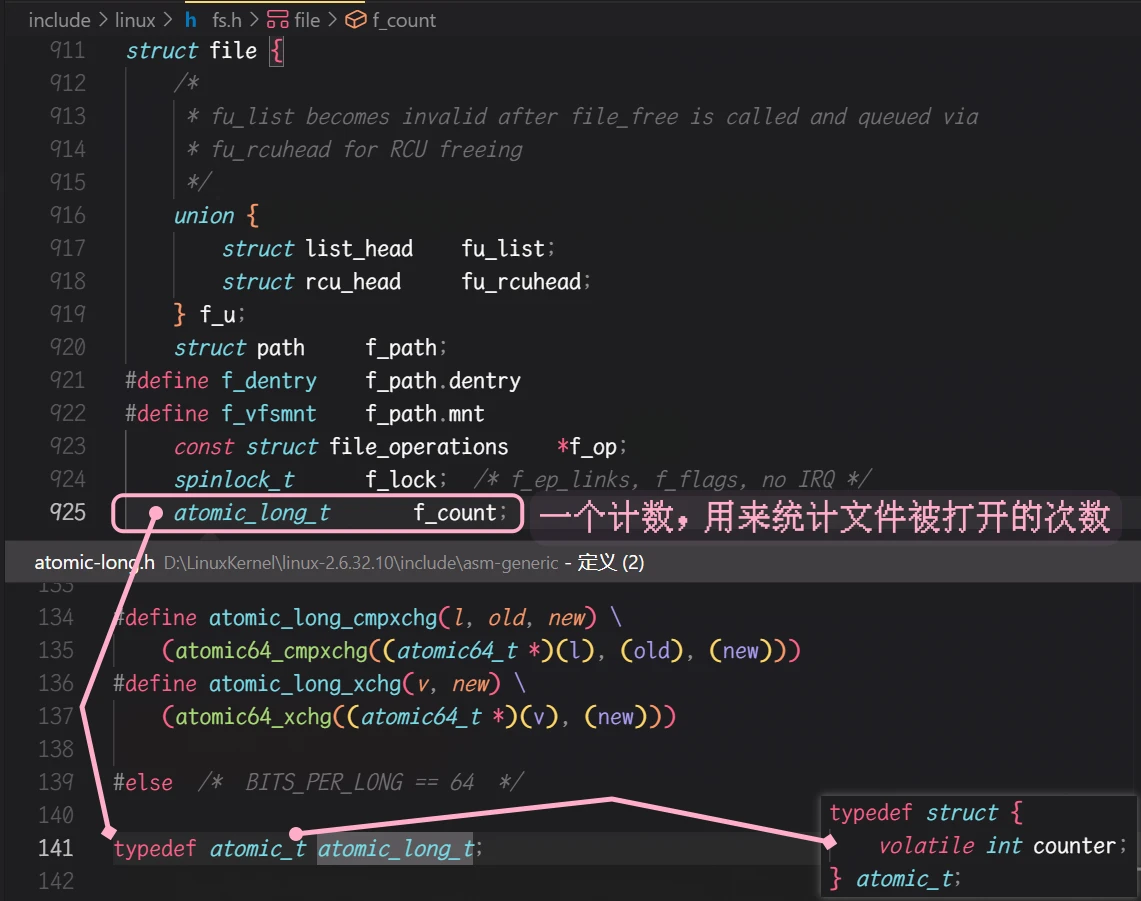
不过, 这个变量实际上还是一个结构体, 用于计数
匿名管道的创建与使用
Linux操作系统提供了一个接口:


且, pipe(), 如果 创建管道成功, 则返回0, 否则返回-1, 并设置errno
pipe系统调用的作用是, 打开一个管道文件. 其参数是一个 输出型参数
在pipe系统调用 执行成功之后, 参数数组内会存储两个元素:
pipe[0],存储以 只读方式 打开管道时获得的fdpipe[1], 存储以 只写方式 打开管道时获得的fd
之后就可以根据需求, 选择父子进程的端口关闭
此系统接口具体的使用, 可以参考下面这段代码:
#include <iostream>
#include <unistd.h>
#include <cstring>
int main() {
// 父进程 pipe()系统调用, 打开管道
int pipeFd[2] = {0};
int ret = pipe(pipeFd);
if(ret != 0) {
std::cerr << "pipe error" << std::endl;
return 1;
}
// 创建子进程
// 并让 父进程 通过管道 向子进程 传输数据
pid_t id = fork();
if(id < 0) {
std::cerr << "fork error" << std::endl;
return 2;
}
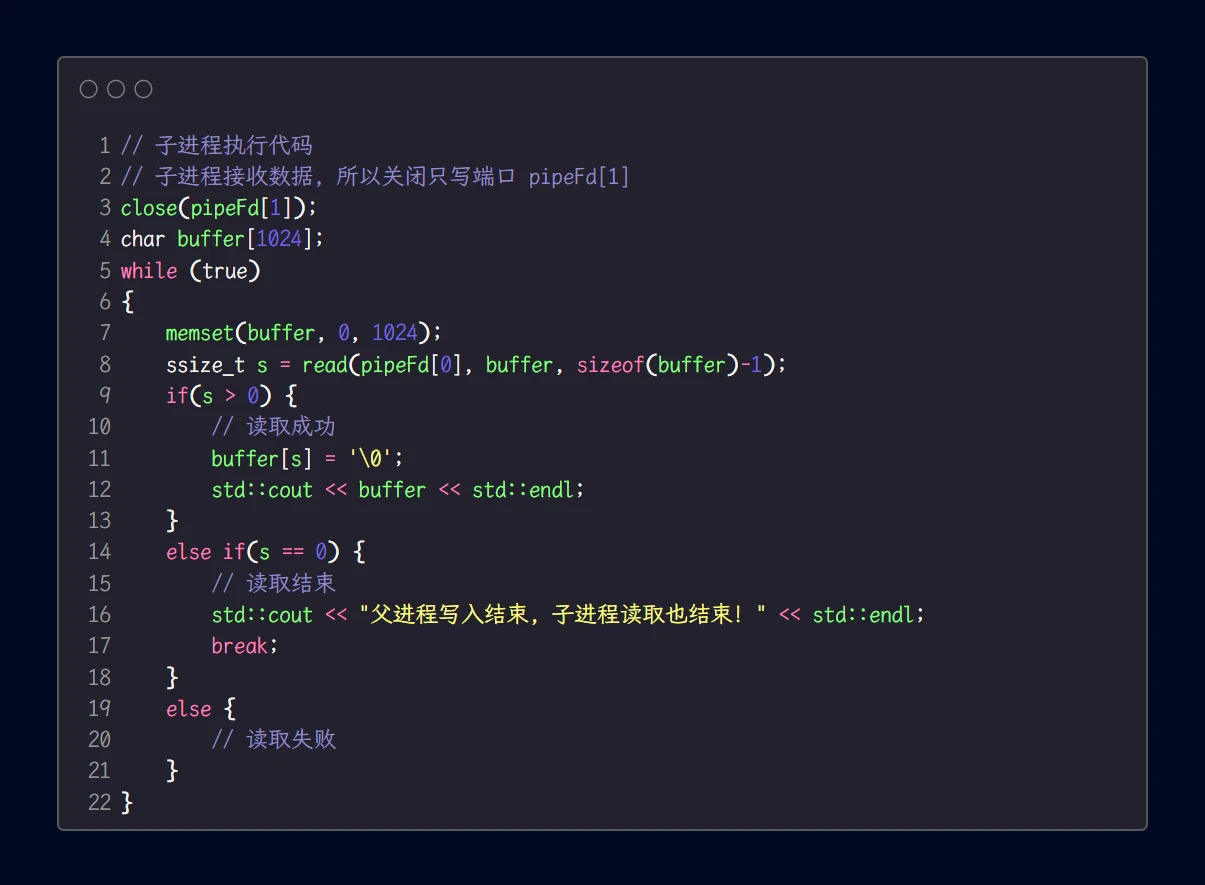
else if(id == 0) {
// 子进程执行代码
// 子进程接收数据, 所以关闭只写端口 pipeFd[1]
close(pipeFd[1]);
char buffer[1024];
while (true)
{
memset(buffer, 0, 1024);
ssize_t s = read(pipeFd[0], buffer, sizeof(buffer)-1);
if(s > 0) {
// 读取成功
buffer[s] = '\0';
std::cout << buffer << std::endl;
}
else if(s == 0) {
// 读取结束
std::cout << "父进程写入结束, 子进程读取也结束!" << std::endl;
break;
}
else {
// 读取失败
}
}
}
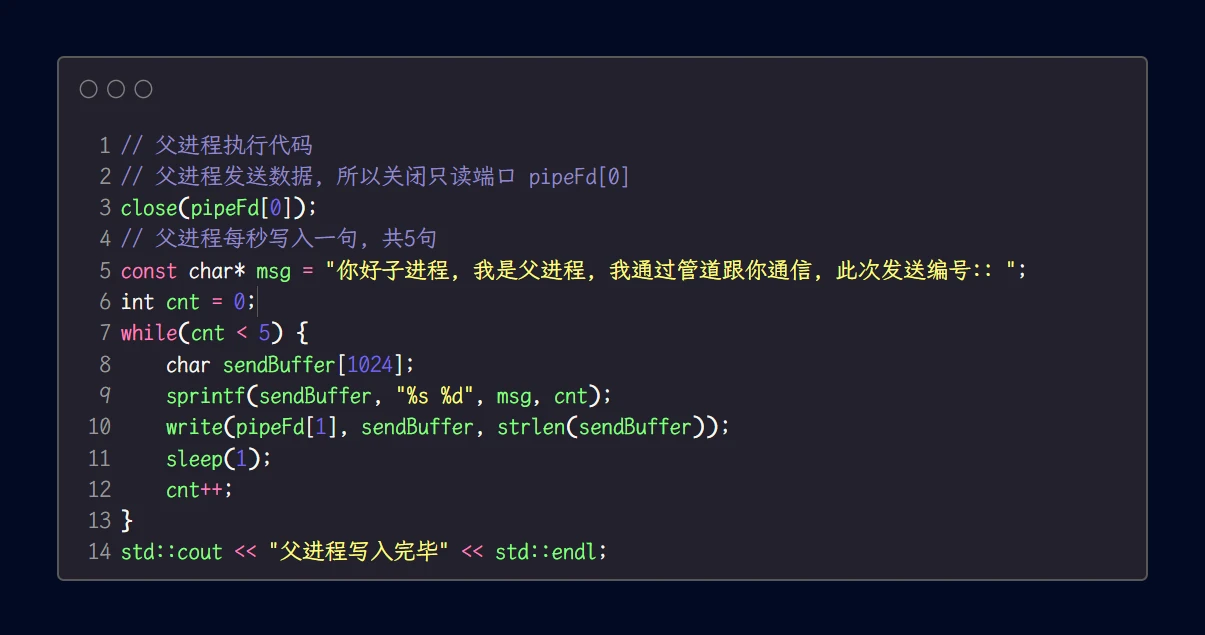
else {
// 父进程执行代码
// 父进程发送数据, 所以关闭只读端口 pipeFd[0]
close(pipeFd[0]);
// 父进程每秒写入一句, 共5句
const char* msg = "你好子进程, 我是父进程, 我通过管道跟你通信, 此次发送编号:: ";
int cnt = 0;
while(cnt < 5) {
char sendBuffer[1024];
sprintf(sendBuffer, "%s %d", msg, cnt);
write(pipeFd[1], sendBuffer, strlen(sendBuffer));
sleep(1);
cnt++;
}
std::cout << "父进程写入完毕" << std::endl;
}
return 0;
}
可以看到, 我们成功使用pipe()接口创建了匿名管道, 在父进程与子进程之间建立了通信
但是, 上面的这个例子, 我们代码中写的时:
-
父进程每1s, 写入一次数据
-
子进程死循环读取父进程写的数据
但是, 代码的执行结果是是什么?代码的执行结果 并不是子进程死循环读取父进程写入到管道的内容
代码的结果像是, 子进程也每1s读取一次管道数据, 或是说 子进程等父进程新写入数据之后才会读取数据
这是什么原因呢?
在父进程没有向管道内写入数据时, 子进程在等待!父进程写入数据之后, 子进程才能read到管道内容, 子进程读取、打印数据是以父进程的节奏为主的
在父子进程对管道进行读写操作时, 是有顺序性的.
此顺序是:写入端必须先写入数据, 读取端才能够读取数据
也就是说, 当管道内部无数据时, 读取端的进程将会进入阻塞状态, 直到写入端写入数据
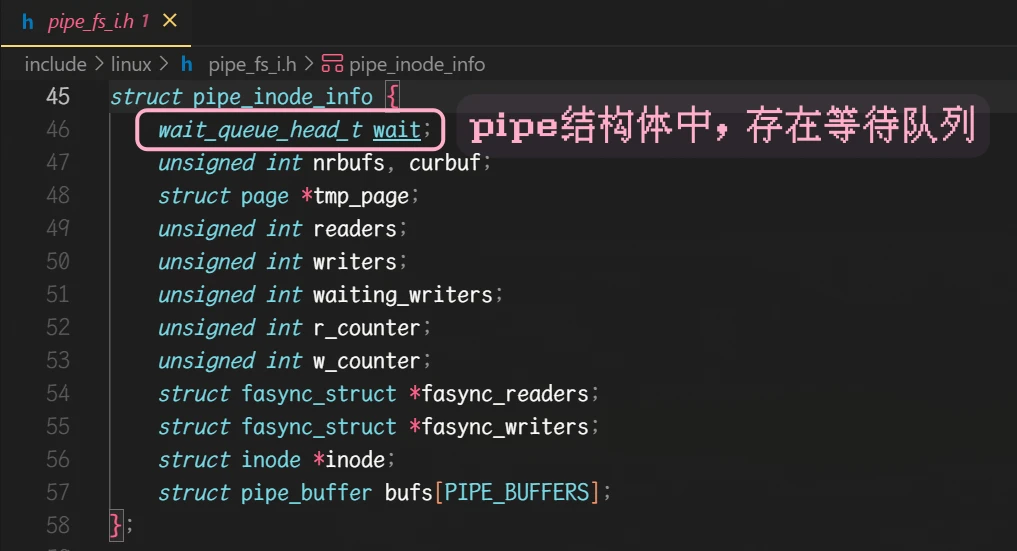
读取端进入阻塞状态, 是因为 当管道内无数据时, 读取端进程会被放入到管道文件的等待队列中等待文件资源
相对应的, 当管道内数据被写满时, 写入端的进程将会进入阻塞状态, 直到读取端读取数据
pipe文件中, 存在等待队列:
可以通过修改父子进程的写入和读取数据的时间, 来验证一下管道文件是否存在读写顺序:
我们将, 父进程改为10s一写入, 再测试:
我们将, 子进程改为15s一读取, 再将父进程改为死循环写入并输出写入次数:
可以看到, 当父进程存在一定的写入间隔时, 子进程读取管道数据也会根据父进程的写入间隔进行读取
当父进程将管道写满, 子进程还未读取时, 父进程不会再向管道中写入内容
这是因为, pipe文件内部存在访问控制机制, 而对于无访问控制机制的文件, 则不会存在写入与读取的顺序
pipe文件存在访问控制机制, 会将管道文件的读写顺序控制为:先写再读.
这其实也符合生活中的管道特点,
管道中传输的资源可以看作是一次性流通的. 比如 向管道中倒入一瓶水, 这瓶水完全经过管道流通之后, 这瓶水就不在管道中了. 管道通信也是这样的, 当读取端读取过管道中存在的数据时, 就可以看作此数据已经流出管道了, 不能在被二次读取.
使用匿名管道控制进程
上面介绍了匿名管道的创建和简单的使用.
不过, 匿名管道的使用, 除了上面 用于进程间传输数据, 还可以用于控制进程.
一个 
简单的例子就是, 可以通过匿名管道向进程派发任务, 以达到控制进程的目的
简单来说就是, 写入端进程 可以向 读取端进程(一般为子进程)派发任务.
而派发任务的大致流程其实是: 通过传输任务的函数指针, 来让子进程执行指定的函数, 以达到派发任务的效果
可以以下面这段代码为例:
#include <iostream>
#include <unistd.h>
#include <ctime>
#include <cstring>
#include <string>
#include <vector>
#include <unordered_map>
#include <sys/wait.h>
#include <sys/types.h>
#include <cassert>
using std::cout;
using std::endl;
using std::cerr;
using std::vector;
using std::string;
using std::unordered_map;
typedef void (*functor)(); // typedef 函数指针为 functor
vector<functor> functors; // 创建函数指针数组, 用来存储函数指针
unordered_map<uint32_t, string> info; // 用来存储 functors 对应元素存储的任务的信息
// 只用函数举例, 不实现具体功能
void f1() {
cout << "这是一个处理日志的任务, 执行的进程 ID [" << getpid() << "]"
<< "执行时间是[" << time(nullptr) << "]\n" << endl;
//
}
void f2() {
cout << "这是一个备份数据任务, 执行的进程 ID [" << getpid() << "]"
<< "执行时间是[" << time(nullptr) << "]\n" << endl;
}
void f3() {
cout << "这是一个处理网络连接的任务, 执行的进程 ID [" << getpid() << "]"
<< "执行时间是[" << time(nullptr) << "]\n" << endl;
}
void loadFunctor() {
info.insert({functors.size(), "处理日志"});
functors.push_back(f1);
info.insert({functors.size(), "备份数据"});
functors.push_back(f2);
info.insert({functors.size(), "处理网络连接"});
functors.push_back(f3);
}
int main() {
// 0. 加载任务列表
loadFunctor(); // 加载任务到数组中, 即 加载任务列表
// 1. 创建管道
int pipeFd[2] = {0};
if(pipe(pipeFd) != 0) {
cerr << "pipe error" << endl;
}
// 2. 创建子进程
pid_t id = fork();
if(id < 0) {
cerr << "fork error" << endl;
}
else if(id == 0) {
// 子进程执行代码
// 关闭 写入端
close(pipeFd[1]);
while(true) {
// 与写入端写入的数据相同的数据类型
uint32_t operatorType = 0;
ssize_t ret = read(pipeFd[0], &operatorType, sizeof(uint32_t));
if(ret == 0) {
cout << "父进程任务派完了, 我要走了……" << endl;
break;
}
// 这里的read返回值 ret, 大小应该是sizeof(uint32_t), 可以断言判断一下
assert(ret == sizeof(uint32_t));
(void)ret;
// 这里将ret强转为void类型, 是为了解决release编译模式中, 有可能因为ret没被使用而出现的warning
// assert() 只在debug编译模式中有效, 使用release模式编译的话, assert()就没有了
// 所以会出现 ret没被使用的情况
if(operatorType < functors.size()) {
// 如果从管道中接收的数据, 在functors(任务列表)的范围内, 则执行任务
functors[operatorType]();
}
else {
// 否则, 就可能出 bug 了
cout << "BUG ? operatorType:: " << operatorType << endl;
}
}
// 执行任务完成, 关闭读取端
close(pipeFd[0]);
exit(0);
}
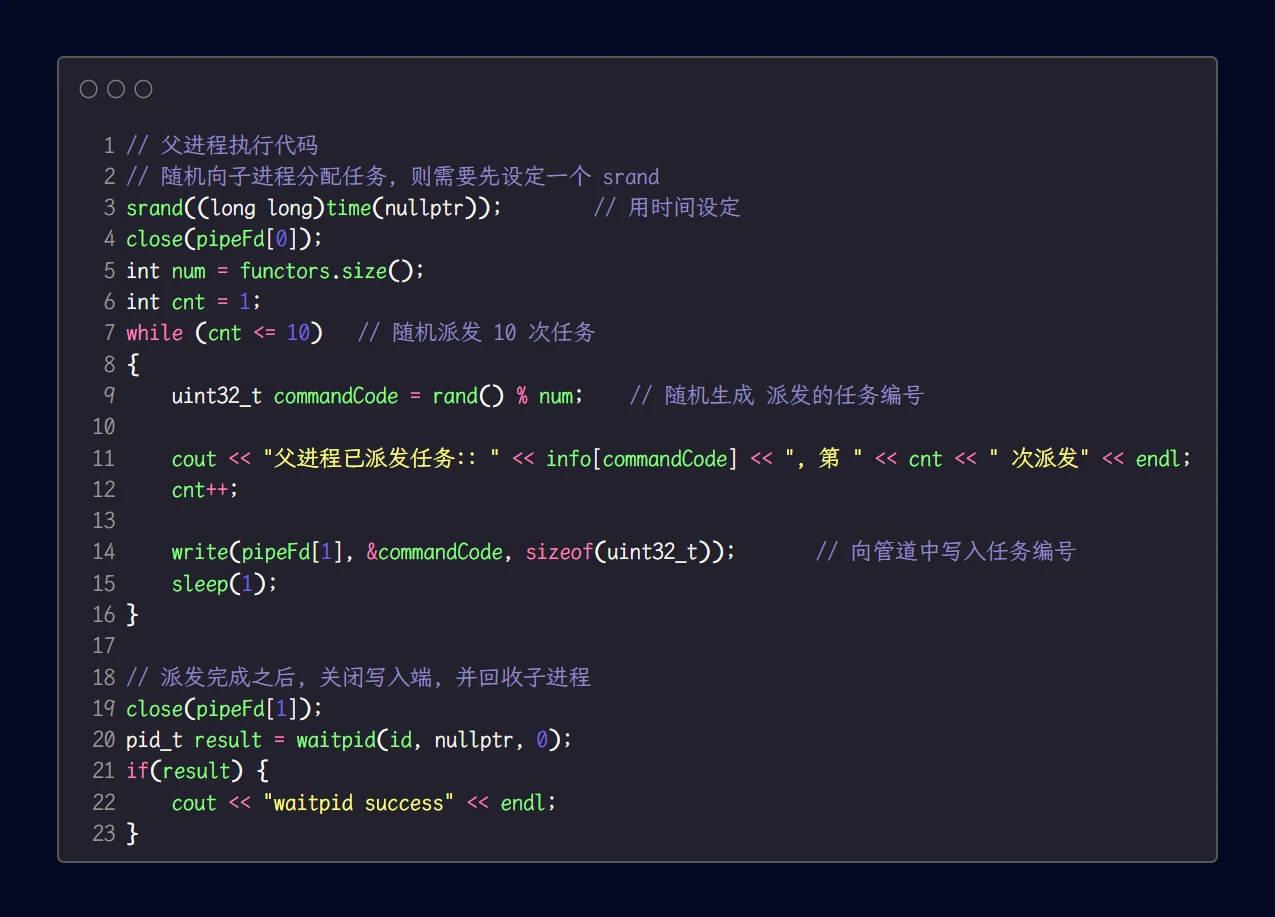
else {
// 父进程执行代码
// 随机向子进程分配任务, 则需要先设定一个 srand
srand((long long)time(nullptr)); // 用时间设定
close(pipeFd[0]);
int num = functors.size();
int cnt = 1;
while (cnt <= 10) // 随机派发 10 次任务
{
uint32_t commandCode = rand() % num; // 随机生成 派发的任务编号
cout << "父进程已派发任务:: " << info[commandCode] << ", 第 " << cnt << " 次派发" << endl;
cnt++;
write(pipeFd[1], &commandCode, sizeof(uint32_t)); // 向管道中写入任务编号
sleep(1);
}
// 派发完成之后, 关闭写入端, 并回收子进程
close(pipeFd[1]);
pid_t result = waitpid(id, nullptr, 0);
if(result) {
cout << "waitpid success" << endl;
}
}
return 0;
}
执行这段代码的结果是:
父进程会随机的向子进程派发, 我们设置的任务, 并且子进程会执行
我在这里简单的分析一下这段代码各部分的用途:
- 任务列表和任务信息部分:
这部分的代码
首先, 定义了一个任务列表:
vector<functor> functors和 用来存放任务信息的哈希表:unordered_map<uint32_t, string> infofunctors 用来存储函数指针, 其下标即为对应任务的任务号
info 用来存储任务信息, pair的first存储任务号, second存储任务信息
然后, 写了三个任务函数, 没有具体功能
最后, 写了一个 将任务加载到functors任务列表、将任务信息加载到info的函数.
- 然后就是main函数:
main函数的内部其实可以分为4大块:
加载任务列表, 即
执行 loadFunctor()函数, 以保证任务列表和任务信息的正常使用创建匿名管道
创建子进程, 并编写子进程执行的代码
子进程需要执行的无非是, 读取管道信息, 并由读取到的信息判断、执行派发的任务
编写父进程需要执行的代码
而父进程需要执行的就是, 向管道中写入数据, 达到向子进程随机派发任务的目的
再然后应该去写, 父进程需要执行的代码:
父进程的功能是 向子进程随机派发任务列表中的任务, 也就需要取随机值, 先使用srand初始化随机数发射
然后
关闭读取端然后派发任务:
派发任务需要
随机获取任务在functors中的编号, 所以uint32_t commandCode = rand() % num,commandCode就是随机获取的任务编号然后**
向管道中以uint32_t为单位, 写入一个任务编号**, 就可以了派发任务循环10次
- 子进程需要执行的代码:

子进程的需要实现:可以从管道中接收父进程写入的任务编号
而父进程写入任务编号的类型是 uint32_t, 所以
子进程读取时也需要以此类型读取所以 子进程先关闭写入端
然后, 定义一个 uint32_t 类型的变量(operatorType)用于从管道中读取任务编号
然后,
ssize_t ret = read(pipeFd[0], &operatorType, sizeof(uint32_t))read: 会返回读取到的数据的字节数, 为0时, 表示写入端已不再写入数据
判断一下read的返回值, 这里判断 为0是派发任务结束 之后
直接用assert断言, ret的大小是sizeof(uint32_t) 类型的, 不然就是读取错数据类型了
(void)ret: 此语句的作用是 为了解决release编译模式中, 有可能因为ret没被使用而出现的waring
assert() 只在debug编译模式中有效, 使用release模式编译的话, assert()就没有了
所以release模式编译会出现 ret没被使用的情况然后判断 读取到的数据是否在functors任务列表的范围内, 如果在则执行对应位置任务
否则就是bug, 需要告知用户
使用匿名管道 控制多个进程
通过匿名管道可以向单个进程派发任务, 以达到控制进程的目的. 同样也可以对多个进程派发任务进而控制多个进程
不过, 对多个进程派发任务的话, 需要的就不是一个匿名管道, 而是对应的多个匿名管道
既然需要创建多个匿名对象, 那么就 需要让父进程知道, 对应的子进程所对应的管道的写端
因为, 需要创建多个管道, 并创建多个子进程, 每个子进程需要对应一条管道. 如果父进程不知道子进程对应的管道, 那么也就无法派发任务, 无法控制子进程
一下面这段代码为例:
#include <iostream>
#include <unistd.h>
#include <ctime>
#include <cstring>
#include <string>
#include <vector>
#include <unordered_map>
#include <sys/wait.h>
#include <sys/types.h>
#include <cassert>
using std::cout;
using std::endl;
using std::cerr;
using std::vector;
using std::string;
using std::unordered_map;
using std::pair;
typedef void (*functor)(); // typedef 函数指针为 functor
vector<functor> functors; // 创建函数指针数组, 用来存储函数指针
unordered_map<uint32_t, string> info; // 用来存储 functors 对应元素存储的任务的信息
typedef pair<pid_t, int> elem; // elem用来存储 子进程pid 以及对应管道的写入端fd
// first 存储子进程pid, second 存储对应管道写端fd
// 只用函数举例, 不实现具体功能
void f1() {
cout << "这是一个处理日志的任务, 执行的进程 ID [" << getpid() << "]"
<< "执行时间是[" << time(nullptr) << "]\n" << endl;
//
}
void f2() {
cout << "这是一个备份数据任务, 执行的进程 ID [" << getpid() << "]"
<< "执行时间是[" << time(nullptr) << "]\n" << endl;
}
void f3() {
cout << "这是一个处理网络连接的任务, 执行的进程 ID [" << getpid() << "]"
<< "执行时间是[" << time(nullptr) << "]\n" << endl;
}
void loadFunctor() {
info.insert({functors.size(), "处理日志"});
functors.push_back(f1);
info.insert({functors.size(), "备份数据"});
functors.push_back(f2);
info.insert({functors.size(), "处理网络连接"});
functors.push_back(f3);
}
void childProcWork(int readFd) {
sleep(1);
cout << "进程 [" << getpid() << "] 开始工作" << endl;
while (true) {
uint32_t operatorType = 0;
ssize_t ret = read(readFd, &operatorType, sizeof(uint32_t));
if(ret == 0) {
cout << "父进程任务派完了, 我要走了……" << endl;
break;
}
assert(ret == sizeof(uint32_t));
(void)ret;
if (operatorType < functors.size()) {
functors[operatorType]();
}
else {
cout << "BUG ? operatorType:: " << operatorType << endl;
}
}
cout << "进程 [" << getpid() << "] 结束工作" << endl;
}
void blanceAssignWork(const vector<elem> &processFds) {
srand((long long)time(nullptr)); // 设置随机数种子
// 随机对子进程 随机分配任务 num 次
int cnt = 0;
int num = 15;
while (cnt < num) {
sleep(1);
// 随机选择子进程
uint32_t pickProc = rand() % processFds.size();
// 随机选择任务
uint32_t pickWork = rand() % functors.size();
write(processFds[pickProc].second, &pickWork, sizeof(uint32_t));
cout << "父进程给进程: " << processFds[pickProc].first << " 派发任务->" << info[pickWork] <<
", 对应管道写端fd: " << pickProc << ", 第 " << cnt << " 次派发" << endl;
cnt--;
}
}
int main() {
// 0. 加载任务列表
loadFunctor();
// 循环创建5个子进程以及对应的管道
vector<elem> assignMap; // 子进程pid与对应管道的fd记录
int processNum = 5;
for(int i = 0; i < processNum; i++) {
int pipeFd[2] = {0};
if(pipe(pipeFd) != 0) {
cerr << "第 " << i << " 次, pipe 错误" << endl;
}
pid_t id = fork();
if(id == 0) {
// 子进程执行代码
close(pipeFd[1]);
childProcWork(pipeFd[0]); // 子进程功能具体函数
close(pipeFd[0]);
exit(0);
}
// 因为在if(id == 0) 的最后, 执行了 exit(0); 所以子进程不会跳出 if(id == 0) 的内部
// 所以下面都为父进程执行的代码
// 父进程执行代码
close(pipeFd[0]);
assignMap.push_back(elem(id, pipeFd[1]));
// elem(id, pipeFd[1]) 创建pair<uint32_t, uint32_t> 匿名对象, 存储 此次创建子进程pid 和 打开管道的写端fd
// 并存入 vector 中
}
cout << "创建子进程完毕" << endl;
cout << "父进程, 开始随机给子进程 随机派发任务\n" << endl;
sleep(1);
blanceAssignWork(assignMap); // 父进程派发任务函数
// 回收所有子进程
for(int i = 0; i < processNum; i++)
close(assignMap[i].second);
for(int i = 0; i < processNum; i++) {
if(waitpid(assignMap[i].first, nullptr, 0)) {
cout << "等待子进程_pid: " << assignMap[i].first << ", 等待成功. Number: " << i << endl;
}
}
return 0;
}
这段代码的执行结果是:
匿名管道向多个进程派发任务, 其中 父进程向管道中写入的过程 和 子进程从管道中读取的过程 是没有变化的
对比 单进程的管道控制, 多进程的管道控制其实只是需要 在父进程中记录子进程的pid以及对应的管道写入端fd
匿名管道特点总结
上面匿名管道的多进程控制中, 父进程打开了多个子进程:
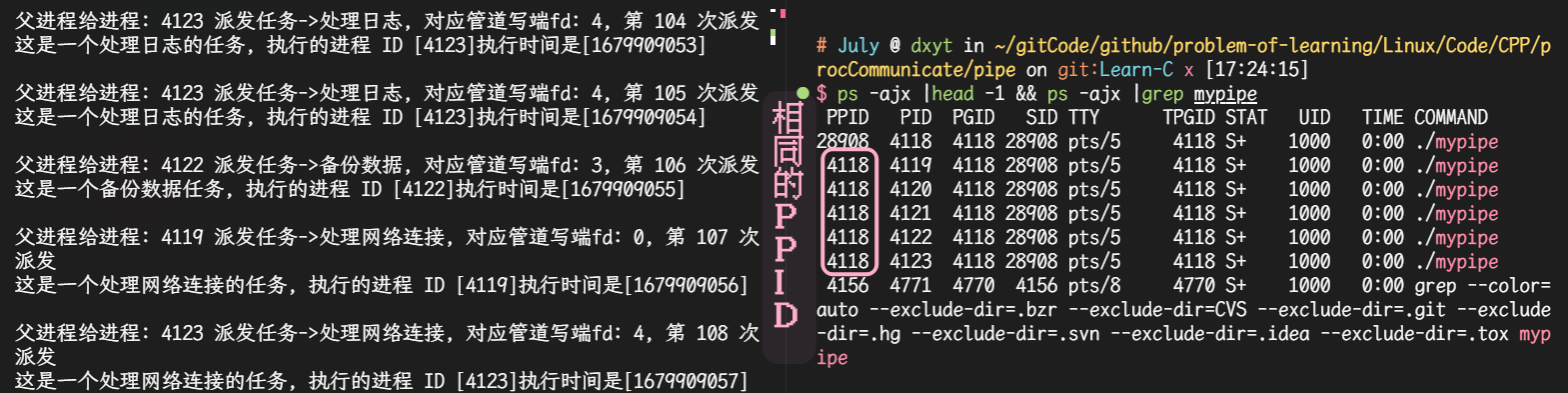
打开的所有子进程拥有相同的ppid, 即相同的父进程, 那么可以称这些进程为兄弟进程
而兄弟进程而是具有血缘关系的进程, 那么也就是说, 只要兄弟进程知道其他管道的写入端fd, 就可以实现兄弟进程间的通信.
实际上, 我们在命令行中使用的 |, 就是兄弟进程间的通信, 也就是说,
| 其实就是命令行上的匿名管道
关于 匿名管道的特点:
- 匿名管道 只能用于 具有血缘关系的进程之间的通信: 父子、兄弟
- 匿名管道 只能单向通信, 是根据管道的特点专门设计成这样的. 是半双工通信的特殊情况
- 匿名管道 自带同步机制(pipe满, 则writer阻塞; pipe空, 则reader阻塞), 即自带访问控制机制
- 匿名管道 是面向字节流的
- 匿名管道 的生命周期 取决于什么时候彻底关闭管道文件(即pipe文件的打开计数为0)
命名管道
匿名管道只能用于具有血缘关系的进程之间的通信
如果想要实现, 毫不相干的进程之间通信, 则需要用到 命名管道
匿名管道是在进程中由pipe()系统调用创建的管道文件. 对用户来说其实是不可见的. 也不能被其他毫无干系的进程打开. 只能通过pipe创建、打开
而命名管道则不同, 命名管道对用户来说, 是可见的, 也就是说在进程内是可以指定路径打开的, 这也是 命名管道可以实现 毫不相干的进程之间通信的原因
命名管道的创建
命名管道有两种创建方法:
-
命令行创建
命名管道可以在命令行使用命令创建
mkfifo:
管道都是先进先出的, 但是命名管道是可见的
使用mkfifo 可以创建命名管道文件:

-
系统调用创建
Linux除了给了mkfifo命令, 还给了mkfifo()系统调用:

mkfifo(const char *pathname, mode_t mode)有两个参数, 第一个参数肯定不用解释了, 是创建**文件的路径及文件名**第二个参数 mode 是什么?
mode其实是创建文件的权限, 以这种格式传参
0000
命名管道的使用
命名管道的使用方法并不难
只需要创建命名管道、进程1 只写打开管道、进程2 只读打开管道、进程1 向管道中写入数据、进程2 从管道中读取数据就可以了.
下面这个例子, 可以实现最基本的命名管道使用:
这个例子, 实现的功能是:
进程1 从命令行接收用户输入的信息, 并写入到命名管道中
进程2 从命名管道中读取数据, 并输出到命令行中
common.h:
// 进程1 和 进程2 都需要包含的头文件
#pragma once
#include <iostream>
#include <cstdio>
#include <cstring>
#include <cerrno>
#include <sys/wait.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#define IPC_PATH "./.fifo" // 命名文件路径
clientFifo.cpp:
// 命名管道客户端, 即写入端, 不参与命名管道的创建
#include "common.h"
using std::cout;
using std::endl;
using std::cerr;
int main() {
int pipeFd = open(IPC_PATH, O_WRONLY); // 只写打开命名管道, 不参与创建
if(pipeFd < 0) {
cerr << "open fifo error" << endl;
return 1;
}
char line[1024]; // 用于接收命令行的信息
while (true) {
printf("请输入消息 $ ");
fflush(stdout); // printf没有刷新stdout, 所以手动刷新
memset(line, 0, sizeof(line));
if(fgets(line, sizeof(line), stdin) != nullptr) {
// 由于fgets 会接收 回车, 所以将 line的最后一位有效字符设置为 '\0'
line[strlen(line) - 1] = '\0';
// 向命名管道写入信息
write(pipeFd, line, strlen(line));
}
else {
break;
}
}
close(pipeFd);
cout << "客户端(写入端)推出啦" << endl;
return 0;
}
serverFifo.cpp:
// 命名管道服务端, 即读取端, 参与命名管道文件的创建
#include "common.h"
using std::cout;
using std::endl;
using std::cerr;
int main() {
umask(0);
if(mkfifo(IPC_PATH, 0666) != 0) {
cerr << "mkfifo error" << endl;
return 1;
}
int pipeFd = open(IPC_PATH, O_RDONLY);
if(pipeFd < 0) {
cerr << "open error" << endl;
return 2;
}
cout << "命名管道文件, 已创建, 已打开" << endl;
char buffer[1024];
while (true) {
ssize_t ret = read(pipeFd, buffer, sizeof(buffer)-1);
if (ret == 0) {
cout << "\n客户端(写入端)退出了, 我也退出吧";
break;
}
else if (ret > 0) {
cout << "客户端 -> 服务器 # " << buffer << endl;
}
else {
cout << "read error: " << strerror(errno) << endl;
break;
}
}
close(pipeFd);
cout << "\n服务端退出……" << endl;
unlink(IPC_PATH);
return 0;
}
makefile:
.PHONY:all
all:clientFifo serverFifo
clientFifo:clientFifo.cpp
g++ $^ -o $@
serverFifo:serverFifo.cpp
g++ $^ -o $@
.PHONY:clean
clean:
rm -f clientFifo serverFifo .fifo
执行make, 然后运行两个可执行程序:
这样就实现了 毫不相干的两个进程之间的通信.
这就是命名管道的基本用法
















 5072
5072

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











