









TensorRT是一个高性能的深度学习推理(Inference)优化器,可以为深度学习应用提供低延迟、高吞吐率的部署推理。TensorRT可用于对超大规模数据中心、嵌入式平台或自动驾驶平台进行推理加速。
学习TensorRT当然是从英伟达官方的sampleMNIST开始,但是没有看英伟达官方API的同学难以直接上手看源码,这里就逐步拆解TensorRT的使用。本文先引入一个案例来介绍TensorRT的大致流程。如果感兴趣的同学可能看完这篇就不用看接下来的逐步分解,能不能坚持写下面的分解还是看心情吧,至于tensorRT的安装困难,我也知道困难,所以我就在docker拉去镜像偷个懒,
一.pytorch 代码案例
二.tensorRT引擎推理(C++版)
三.CMake简单链接
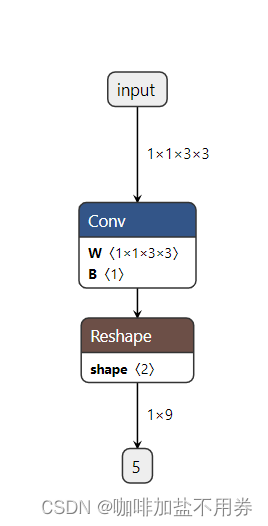
一.pytorch 代码案例
import torch
import torch.nn as nn
class Model(nn.Module):
def __init__(self):
super().__init__()
self.conv=nn.Conv2d(1,1,3,stride=1,padding=1,bias=True)
self.conv.weight.data.fill_(0.3)
self.conv.bias.data.fill_(0.2)
def forward(self,x):
x=self.conv(x)
# return x.view(x.size(0),-1)
return x.view(-1,int(x.numel()//x.size(0)))
model=Model().eval()
x=torch.full((1,1,3,3),1.0)
y=model(x)
torch.onnx.export(model,(x,),"lesson1.onnx",input_names=["input"],output_names=["output"],verbose=True)
##注意这里的input 和 output 要用到
二.TensorRT推理引擎
大体流程如下图所示:
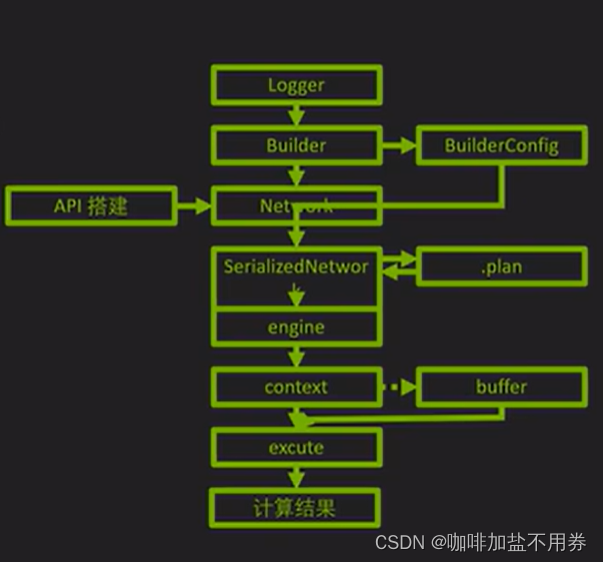
大体流程:
1.创建阶段
1.1创建日志(记录错误信息)
1.2建立Builder(管理网络元数据)和BuilderConfig() (配置信息)
1.3导入网络Network(由于这里是直接导入onnx文件,不需要从头用TensorRT构建网络机构)
1.4序列化
2.运行阶段
2.1建立引擎engine
2.2建立Context(GPU进程)
2.3为输入和输出建立Buffer区,这里于pytorch代码中的到处onnx文件代码对应
2.4buffer拷贝 (主机端到设备端,这里涉及cuda编程,由于本案例简单,不需要有cuda编程也懂)
2.5执行推理
2.6 Buffer拷贝回去(设备端到主机端)
废话不说上代码:
前期准备
#include "NvInfer.h" //tensorRT的库导入
#include<iostream>
#include <cuda_runtime_api.h> //cuda编程库导入
#include "NvOnnxParser.h"
#include <cassert>
#include <fstream>
#include <sstream>
#include <chrono>
using namespace nvinfer1; //tensorRT大部分的命名空间
using namespace nvonnxparser; //tensorRT解析器的明明空间
const char* INPUT_BLOB_NAME = "input"; //这里对应pytorch中 export操作的输入
const char* OUTPUT_BLOB_NAME = "output"; //这里对应pytorch中 export操作的输入
const int INPUT_H=100;
const int INPUT_W=100;
const int OUTPUT_SIZE=1;
#define CHECK(status) \
do\
{\
auto ret = (status);\
if (ret != 0)\
{\
std::cerr << "Cuda failure: " << ret << std::endl;\
abort();\
}\
} while (0)
建立日志,记录错误信息
class Logger:public ILogger{
void log(Severity severity,const char*msg) noexcept override{
##kWARNING是一个整数,小于他的都是错误的信息 需要打印
if(severity<Severity::kWARNING)
std::cout<<msg<<std::endl;
};
}logger;建立引擎 需要外部输入builder和builder_config
ICudaEngine* createEngine(unsigned int maxBatchSize,IBuilder* builder,IBuilderConfig* config){
##maxbatchsize是输入数据的batch大小
##创建网络的定义信息 下面的 kEXPLICIT_BATCH是个常数,这里是显示的做批处理,必须要有使用flag操作。
uint32_t flag=1U<<static_cast<uint32_t(NetworkDefinitionCreationFlag::kEXPLICIT_BATCH);
INetworkDefinition * network=builder->createNetworkV2(flag);
##创建解析器
IParser* parser=createParser(*network,logger);
##下面的lesson1.onnx就是pytorch导出的
const char* onnx_path="../lesson1.onnx";
parser->parseFromFile(onnx_path,static_cast<int32_t>(ILogger::Severity::kWARNING));
for(int32_t i=0;i<parser->getNbErrors();i++){
std::cout<<parser->getError(i)->desc()<<std::endl;
}
#为builder设置一些必要的信息
builder->setMaxBatchSize(maxBatchSize);
config->setMemoryPoolLimit(MemoryPoolType::kWORKSPACE,1U<<20);
#创建引擎
ICudaEngine* engine=builder->buildEngineWithConfig(*network,*config);
std::cout << "successfully convert onnx to engine!!! " << std::endl;
delete network;
delete parser;
return engine;
}编写创建引擎的逻辑,调用上述函数
void APIToModel(unsigned int maxBatchSize,IHostMemory** modelStream){
#补了上述船舰builder和config的遗憾
IBuilder * builder=createInferBuilder(logger);
IBuilderConfig* config=builder->createBuilderConfig();
ICudaEngine* engine=createEngine(maxBatchSize,builder,config);
assert (engine!=nullptr);
// int k=engine->getNbBindings();
// std::cout<<"size of is "<<k<<std::endl;
// for(int i=0;i<k;i++) std::cout<<"name is "<<engine->getBindingName(i)<<std::endl;
(*modelStream) = engine->serialize();
delete engine;
delete builder;
delete config;
}编写在进行推理期间,要在GPU上申请空间并申请input和output的buffer
void doInferenced(IExecutionContext& context,float* input,float*output,int batchSize){
// 获取活跃在gpu进程中的引擎
const ICudaEngine& engine=context.getEngine();
assert(engine.getNbBindings()==2);
// 定义cuda上数据空间的名字
void * buffers[2];
// 获取engine中输入输出的索引,注意这里的INPUT_BLOB_NAME和OUTPUT_BLOB_NAME是在pytorch中声明的input和output
int inputIndex=engine.getBindingIndex(INPUT_BLOB_NAME);
int outputIndex=engine.getBindingIndex(OUTPUT_BLOB_NAME);
//在gpu上申请空间,这个空间就是上面的输入输出的指针,大小就是一个tensor的大小,注意要flatten
cudaMalloc(&buffers[inputIndex],batchSize*3*INPUT_H*INPUT_W*sizeof(float));
cudaMalloc(&buffers[outputIndex],batchSize*OUTPUT_SIZE*sizeof(float));
// 开启cuda流,这个是cuda编程 可以看看,以后有想法可以开坑写一些
cudaStream_t stream;
CHECK(cudaStreamCreate(&stream));
CHECK(cudaMemcpyAsync(buffers[inputIndex],input,batchSize*3*INPUT_H*INPUT_W*sizeof(float),cudaMemcpyHostToDevice,stream));
// cuda流异步启动推理
context.enqueue(batchSize, buffers, stream, nullptr);
CHECK(cudaMemcpyAsync(output,buffers[outputIndex],batchSize*OUTPUT_SIZE*sizeof(float),cudaMemcpyDeviceToHost, stream));
// 同步一下cuda流
cudaStreamSynchronize(stream);
cudaStreamDestroy(stream);
CHECK(cudaFree(buffers[inputIndex]));
CHECK(cudaFree(buffers[outputIndex]));
}将引擎保存到本地
int get_trtengine(){
IHostMemory* modelStream{nullptr};
APIToModel(1,&modelStream);
assert(modelStream!=nullptr);
std::ofstream a ("./lesson1.engine",std::ios::binary);
if(!a){
std::cerr<<"could not open plan output file"<<std::endl;
return -1;
}
a.write(reinterpret_cast<const char*>(modelStream->data()),modelStream->size());
// modelStream->destroy();
delete modelStream;
return 0;
}启动推理,下面就简单里,嘎嘎乱杀即可
int infer(){
char* trtModelStream{nullptr};
size_t size{0};
//读取引擎
std::ifstream file("./lesson1.engine",std::ios::binary);
if(file.good()){
file.seekg(0,file.end);
size=file.tellg();
file.seekg(0,file.beg);
trtModelStream=new char[size];
assert(trtModelStream);
file.read(trtModelStream,size);
file.close();
}
IRuntime* runtime=createInferRuntime(logger);
assert(runtime!=nullptr);
//反序列化
ICudaEngine* engine = runtime->deserializeCudaEngine(trtModelStream, size, nullptr);
assert(engine != nullptr);
//创建进程
IExecutionContext* context = engine->createExecutionContext();
assert(context != nullptr);
delete[] trtModelStream;
float time_read_img=0;
float time_infer=0;
//定义输出大小
static float prob[OUTPUT_SIZE];
auto start = std::chrono::system_clock::now();
for (int i=0;i<1000;i++){
static float data[3*INPUT_H*INPUT_W];
for (int j=0;j<3*INPUT_H*INPUT_W;j++){
data[i]=std::rand()/10;
}
doInferenced(*context,data,prob,1);
std::cout<<prob[0]<<std::endl;
}
auto end = std::chrono::system_clock::now();
std::cout << std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count() << "ms" << std::endl;
delete context;
delete engine;
delete runtime;
}
int main(){
get_trtengine();
infer();
}三.CMake编写 (这不是重点 因地制宜的写写,这是按照本案例用到的库做的链接)
cmake_minimum_required(VERSION 3.1) ##最低版本
project(trt_example) ##项目名称
#tensorrt
include_directories(/usr/include/x86_64-linux-gnu) ##cmake 导入库文件
include_directories(/workspace/tensorrt/samples/common)
#cuda
include_directories(/usr/local/cuda-11.7/targets/x86_64-linux/include)
#cmake使用的C++版本号
set(CMAKE_CXX_STANDARD 14)
#为工程添加可执行文件
add_executable(trt_example main.cpp)
#链接.so文件
target_link_libraries(trt_example /usr/local/cuda-11.7/targets/x86_64-linux/lib/libcudart.so)
target_link_libraries(trt_example /usr/lib/x86_64-linux-gnu/libnvinfer.so)
target_link_libraries(trt_example /usr/lib/x86_64-linux-gnu/libnvonnxparser.so)
#使用cuda
set_target_properties(trt_example PROPERTIES
CUDA_SEPARABLE_COMPILATION ON)















 1561
1561

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









