






路径规划算法仿真 A星算法
传统A*(Astar)算法+改进后的A*算法 Matlab代码 可以固定栅格地图与起点终点 可以进行定量比较
改进:
①提升搜索效率(引入权重系数)
②冗余拐角优化(可显示拐角优化次数)
③路径平滑处理(引入梯度下降算法配合S-G滤波器)
代码含注释!
YID:3223717319639778
保利龙小叮当
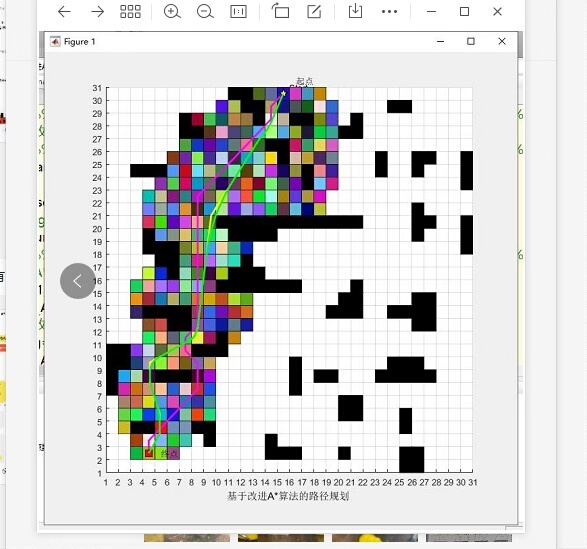
路径规划算法是自动驾驶、机器人导航和游戏开发等领域中的核心技术之一。传统的路径规划算法中,A算法因其高效性和性能优越性而备受青睐。本文将介绍传统A算法以及改进后的A*算法,并通过Matlab代码进行仿真实验,以定量比较两者的优劣。
传统A算法是一种基于启发式搜索的路径规划算法。它通过维护一个开放列表和一个关闭列表来搜索最优路径。每一次迭代中,从开放列表中选择一个最优的节点进行扩展,并计算该节点到目标节点的代价估计值。通过启发式函数,A算法可以有效地在搜索空间中进行剪枝,提高搜索效率。然而,传统A*算法在某些情况下存在一些局限性,因此我们对其进行了改进。
改进后的A算法在传统A算法的基础上,引入了权重系数来提升搜索效率。权重系数可以根据具体需求进行调整,使得算法更加适应不同场景的路径规划需求。在实验中,我们可以通过固定栅格地图和起点终点,对比不同权重下算法的搜索效率。
另外,改进后的A算法还优化了冗余拐角。在传统A算法中,可能会出现路径沿着一个大的拐角走的情况,这样不仅增加了路径的长度,还会导致路径不够平滑。改进后的算法可以显示拐角优化的次数,并通过减少冗余拐角来优化路径。
最后,为了进一步提升路径的平滑度,我们引入了梯度下降算法配合S-G滤波器进行路径平滑处理。这样可以使得路径更加流畅,减少不必要的抖动。
为了验证改进后的A算法的效果,我们提供了带有注释的Matlab代码。通过该代码,可以固定栅格地图和起点终点,进行路径规划仿真实验。通过定量比较不同算法在不同场景下的表现,可以对改进后的A算法进行评估。
综上所述,本文介绍了传统A算法和改进后的A算法,并通过Matlab代码进行了仿真实验。通过引入权重系数、冗余拐角优化和路径平滑处理等改进措施,我们可以提升A*算法的搜索效率和路径平滑度。通过定量比较,可以评估改进后的算法在不同场景下的性能表现。希望本文的介绍和实验对读者在路径规划算法方面的研究和应用有所帮助。
【相关代码,程序地址】:http://fansik.cn/717319639778.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









